Jesteśmy już po pierwszym etapie projektu, w którym powstał prototyp, na którym można dalej rozwijać oprogramowanie i testować sprzęt. Wygląda to tak:
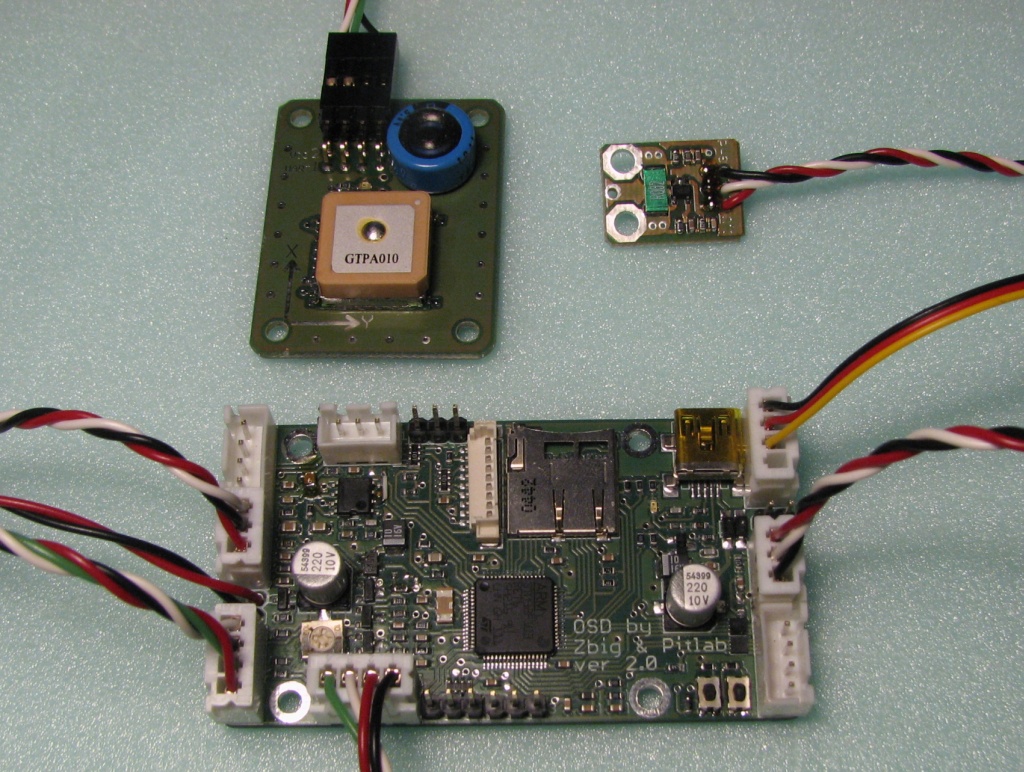
Sercem projektu jest kontroler ARM ze stajni ST. Tor wizyjny wygląda podobnie jak we wcześniejszej wersji. Ma możliwość rysowania czarnych i białych linii, oraz półcieni. Ma potencjometr pozwalający na dopasowanie poziomu jasności rysowanych elementów do obrazu z konkretnej kamery.
OSD komunikuje się z zewnętrznymi modułami takimi jak GPS oraz czujnikiem prądu i napięcia. W rezerwie ma jeszcze dwa wejścia analogowe oraz port I2C do podłączania zewnętrznych czujników cyfrowych.
Komunikacja ze światem jest przez porty:
- UART (TTL 3,3V) do komputera PC używany do konfiguracji urządzenia dedykowanym oprogramowaniem, oraz aktualizacji oprogramowania,
- USB jako alternatywa do tego co wyżej,
- UART (TTL 3,3V) do komunikacji z autopilotem,
- wspominane wyżej I2C do komunikacji z zewnętrznymi czujnikami,
- wejście sygnału PWM z odbiornika RC (jeden kanał) do sterowania OSD w locie z aparatury,
- wejście sygnału z klawiatury do wygodnej nawigacji po menu,
- JTAG do celów debugowania, prawdopodobnie tylko w prototypach,
- karta micro SD do logowania parametrów lotu.
OSD może być zasilane z kilku źródeł. Podstawowe źródło to 12V użyte również do zasilania kamery i nadajnika video, oraz opcjonalnie do wytworzenia pozostałych napięć. Napięcie potrzebne do wytworzenia 3,3V może być pobrane z odbiornika RC lub na ziemi z USB.
Na spodzie płytki są zworki robione kroplą cyny, umożliwiające przełączanie zasilania:
- kamery: 5V lub 12V (domyślne 12V)
- modułu GPS: 3,3V lub 5V (domyślnie 5V, moduł ma własny stabilizator)
- będzie dodana zworka odłączająca wejście stabilizatora 3,3V od zasilania z pakietu 12V.
Złącza dla użytkownika są typu JST, takie same jak używane do balansowania pakietów Lixx. Mają zatrzask, polaryzację zabezpieczającą przed odwrotnym podłączeniem, standardowy, niezbyt drobny raster a gotowy kabelek z takim złączem można kupić pewnie w każdym sklepie modelarskim. Będę dostarczał OSD już z możliwie gotowym okablowaniem, jedynie trzeba będzie sobie zakończyć odpowiednią wtyczką kabel do nadajnika i kamery.
Złącza szpilkowe są do współpracy z modułem autopilota, który pojawi się za jakiś czas.
Wymiary płytki to 72x40mm. Pozostałe szczegóły i znaczenie złącz opisane jest na rysunku:
Powinno się zmieścić w każdym kadłubie. Dalsza miniaturyzacja wiąże się z większymi kosztami, więc doszliśmy do wniosku że to będzie optymalny rozmiar.
O cenie i terminie dostępności będziemy informowali gdy przyjdzie stosowny czas. Na razie skupiamy się na kwestiach technicznych i organizacyjnych, tak aby zdążyć przed następnym sezonem.
Jeszcze kilka słów od Zbiga
Zbig pisze:lista założeń, które przyświecają temu projektowi:
* Projekt jest dla ludzi, którzy mają być zadowoleni z jego używania.
Prawdę mówiąc nie ma więcej założeń. Wszystko inne wynika z tego jednego
Pewnie ciekawsze dla wszystkich jest to, co zrobiliśmy, aby powyższa teza nie była czczą przechwałką.
*System będzie kompletny. Dziś już widzicie OSD, czujnik prądu i GPS, za chwilę dołączy klawiatura. To minimum dla pilota FPV, ale już dziś to OSD wspólpracuje z moją starą jednostką IMU (horyzont), autopilotem i sterownikiem anteny śledzacej. Ci, którzy maja OSD M644, mogą go wymienić na nowe nie rezygnaując z pozostałych elementów. Oczywiście te elementy będą systematycznie przekładane na nowszą technologię i będa dołączały do komercyjnego zestawu.
To tylko kwestia czasu, bo wersja 1.0 po prostu jest i działa.
*system będzie bezstresowy i łatwy w instalacji. Nie wymagamy zacięcia inżynierskiego. Stąd kable, które mozna po prostu gotowe kupić i już. Ja mam zaciskarkę, ale prawie wszystkie kabelki, które sam zacisnąłem po jakimś czasie któryś kabelek sie wysunął. Te które kupiłem w HK za grosze, trzymaja mocno. Właczenie odwrotne wtyczki? jeśli tylko wtyczka pozwoli, to tylko kwestia czasu. Serwo jest odporne na odwrotne włączenie (tak szczęśliwie mają ułożone piny), ale ja nawet do prototypu OSD podłaczyłem 12V odwrotnie. A właściwie
, bo Piotr i to przewidział, robiąc na płytce OSD zabezpieczenie przez takimi przypadkami. Przelutowalem wtyczkę i OSD zadziałało jak gdyby nigdy nic.
*system będzie intuicyjny i prosty w użyciu. Nie wymagamy umiejętności programowania, ani studiów z zakresu cybernetyki. Doświadczenia z użytkownikami mojego autopilota, oraz tasiemcowe watki na forach jak co ustawić, mi działa, a mi nie działa - dały mi dużo do myślenia. Stąd Wiele rozwiazań, które mają pomóc pilotom i to w momencie kiedy tego najbardziej potrzebują - czyli na lotnisku, albo w czasie lotu modelu.
*produkt musi się zwyczajnie podobać. Jak Wasz nowy model samolotu, auta, samochód, telefon czy zegarek. Oczywiście o gustach trudno dyskutować, ale tu też wychodzimy na przeciw oczekiwaniaom, więc wygląd OSD będzie dosyć swobodnie konfigurowany przez użytkownika.
*System musi być globalny. Sukces produktu, to również sukces samych użytkowników. Nie oszukujmy się, produkty amatorskie cierpią z powodu tego, że sa zbyt wolno rozwijane bo są niedoinwestowane. Tylko szeroka sprzedaż może zapewnić rozsądne ceny i pieniądze na dalszy rozwój, inaczej uduszą sie jak ryba pod lodem. Znajdziecie więc w tym projecie rozwiazania "globalizujące" produkt. A to szansa na ciekawe upgrade'y i nowe pomysły
*Produkt musi być rozwojowy. Wiedzą to najlepiej Ci, którzy maja moje M644 (i chyba nie tylko moje, jak czytam w innych wątkach) i słyszą od pewnego czasu: "nie mam już niejsca w procesorze" To dlatego wybraliśmy "wypasioną" wersję ARM-a, w którym na poczatek nie zajmiemy więcej niż 1/4 pamięci. Ale mam nadzieję długo nie bedzie problemu z dodaniem nowej funkcji. W tej nadmiarowości jest też zdublowanie UART/USB, czy miejsce na kartę pamięci, choć wysyłamy dane telemetryczne na ziemię.
Wiele obietnic, ale mam nadzieję, że Wy, najbardziej surowi cenzorzy ocenicie czy je spełniliśmy.
na razie skończę na tych ogólnych stwierdzeniach, wkrótce szczegóły.