
Hm niestety, albo stety nie próbowałem więcej jak z 3s. Mocno się grzał.maxiiii pisze:W opisie jest 7-24 ale jak podłączysz 24 to pożegnaj się z nadajnikiem?
Koledzy z chin czasami sami nie wiedzą co piszą:(((
Octoquad. Octocopter 580 - fotorelacja ze składania.
Moderatorzy: moderatorzy2014, moderatorzy
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Czy tylko u mnie foty przestały działać? :(

Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
To mnie już chyba trafi .....
tyle roboty na marne ten fotosik nieźle robi w trąbkę.
Zaraz zapłacę za dodatkowy transfer i wszystko wróci do normy.
EDIT
zwiekszenie transferu o 1GB 3,69zł.
tyle roboty na marne ten fotosik nieźle robi w trąbkę.
Zaraz zapłacę za dodatkowy transfer i wszystko wróci do normy.
EDIT
zwiekszenie transferu o 1GB 3,69zł.
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Hm nie lepiej na google + ? Tam darmowy.
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Pierwszy lot testowy mam za sobą.
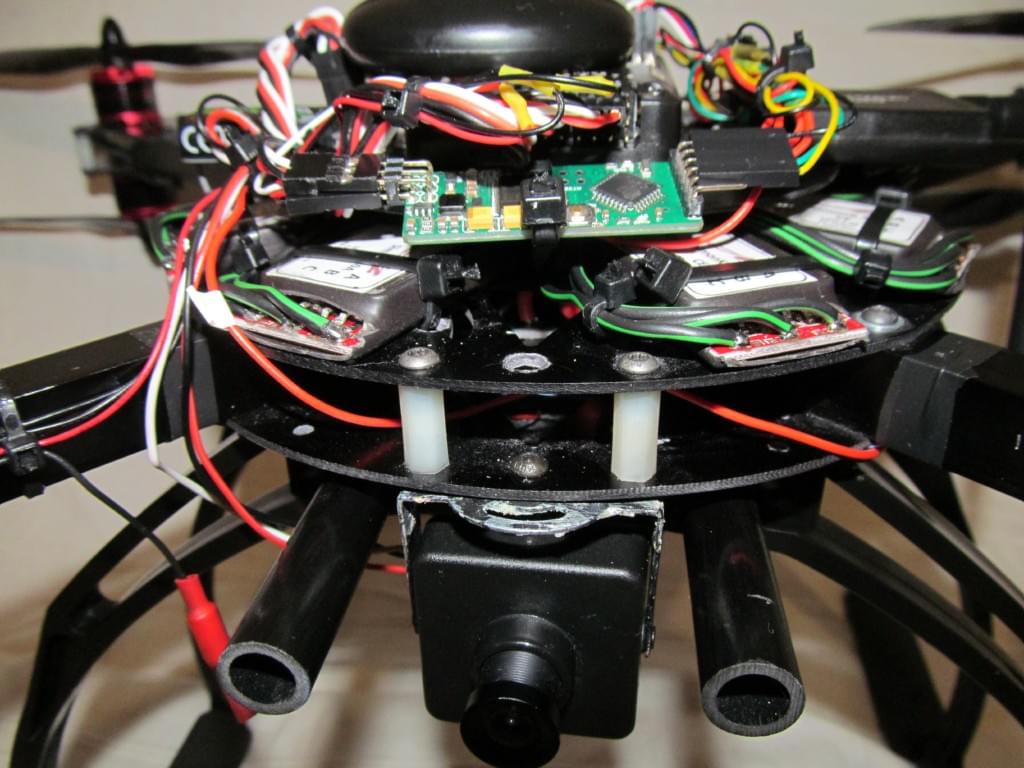
Tak wyglądał sprzęt przed lotem.

tak w trakcie, niestety ale na tablecie nic nie widać ale za to było dobrze słychać.




test wyglądał tak.
Najpierw uzbrojenie silników, gaz lekko w górę i sprawdzałem czy nic się nie dymi.
Na tablecie hdop 1,3.
Tryb lotu loiter, gaz ponad połowa i oczekiwanie - fiknie koziołka czy nie?
Tym razem obeszło się bez nieprzewidzianych atrakcji. Okto gładko ruszyło w górę. Na dwóch metrach sekunda oczekiwania i szybkie lądowanie.
Sprawdziłem regulatory i silniki, jak na razie wszystko tak jak powinno być.
Ponowne uzbrojenie i w górę. Teraz na wysokość ok 10 metrów.
No i tu niespodzianka wieje spory wiatr ale zauważyłem, że copterem lekko buja nie tak jak to powinno w tych warunkach.
Wszystko w trybie loiter.
Obrót dookoła własnej osi. Raz wolny raz szybki. OK
Odlot 10-15metrów do przodu - nic nie znosi. OK
RTH - kopter wylądował ok 20cm od miejsca startu, jak na hdop1,3 to bardzo dobrze.
COMPASMOT zadziałał bezbłędnie, wprowadzona kompensacja na prąd zrobiła dokładnie to co miała zrobić nic nie dryfuje i nic nie znosi z kursu.
Ponowny start i chwila lotu w trybie aldhold czyli bez kompasu i dps-a ale z barometrem - żadnych złych objawów. OK
Ze względu na te lekkie bujanie nie obejdzie się bez pidowania - czegoś czego bardzo nie lubię.
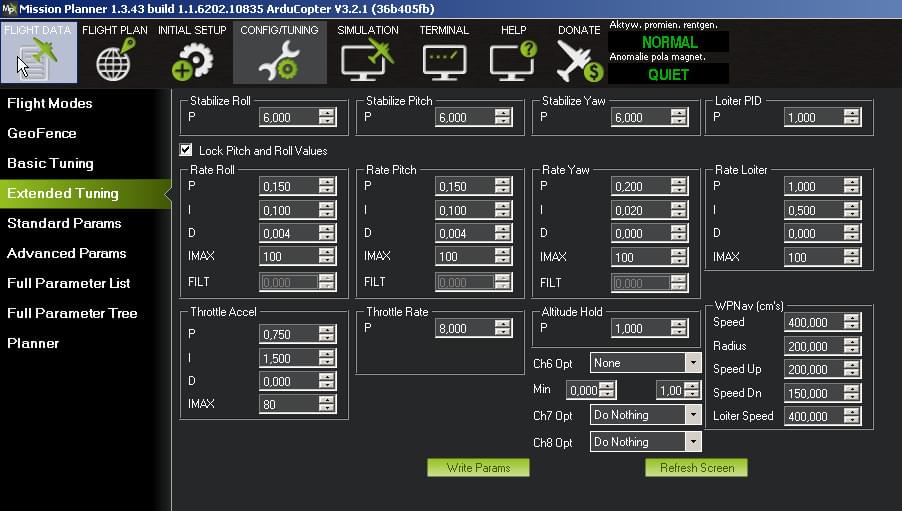
Najpierw zrobiłem zrzut ekranu z pierwotnymi pidami.
Ustawiłem 7 kanał na autpidowanie i heja w górę.
Wszystko w trybie aldhold. Zaczął wiać spory boczny wiatr ale nie chciałem przerywać i tylko patrzyłem kiedy spadnie:))
Takiego dziwnego tańca jeszcze nie miałem, na takim wietrze jeszcze nigdy nie robiłem autotune:))
Miotało go nawet do 50 metrów w bok.

Bez urazy Kuczy ale pidowanie nie trwało pół roku a tylko 9 minut.:))
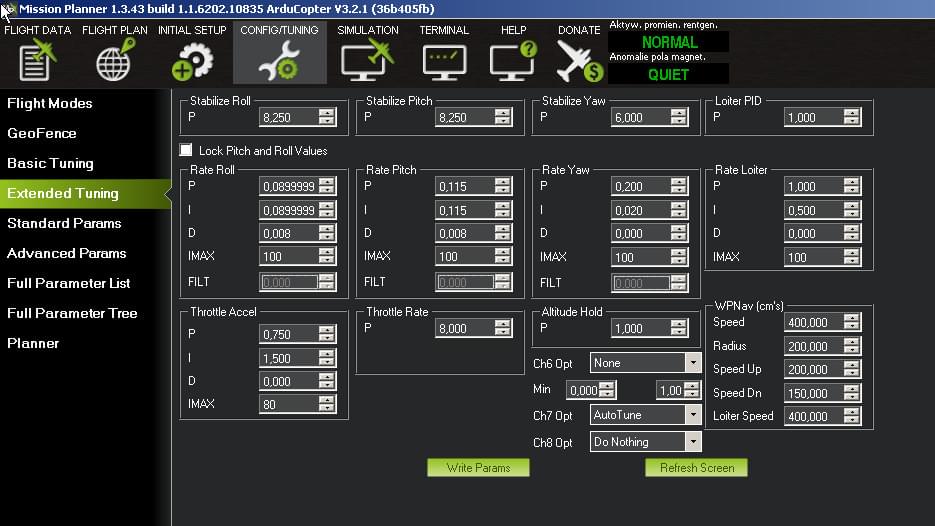
Wolę aby moje pidowanie robili profesjonaliści czyli AUTOTUNE.
Po autotune polatałem na ustawionych pidach i już go nie bujało - zaczął latać tak jak chciałem. Tym razem było dobrze.
Pidy po autotune
Pora teraz wyposażyć octo w jakieś gagety.:))
Tak wyglądał sprzęt przed lotem.
tak w trakcie, niestety ale na tablecie nic nie widać ale za to było dobrze słychać.
test wyglądał tak.
Najpierw uzbrojenie silników, gaz lekko w górę i sprawdzałem czy nic się nie dymi.
Na tablecie hdop 1,3.
Tryb lotu loiter, gaz ponad połowa i oczekiwanie - fiknie koziołka czy nie?
Tym razem obeszło się bez nieprzewidzianych atrakcji. Okto gładko ruszyło w górę. Na dwóch metrach sekunda oczekiwania i szybkie lądowanie.
Sprawdziłem regulatory i silniki, jak na razie wszystko tak jak powinno być.
Ponowne uzbrojenie i w górę. Teraz na wysokość ok 10 metrów.
No i tu niespodzianka wieje spory wiatr ale zauważyłem, że copterem lekko buja nie tak jak to powinno w tych warunkach.
Wszystko w trybie loiter.
Obrót dookoła własnej osi. Raz wolny raz szybki. OK
Odlot 10-15metrów do przodu - nic nie znosi. OK
RTH - kopter wylądował ok 20cm od miejsca startu, jak na hdop1,3 to bardzo dobrze.
COMPASMOT zadziałał bezbłędnie, wprowadzona kompensacja na prąd zrobiła dokładnie to co miała zrobić nic nie dryfuje i nic nie znosi z kursu.
Ponowny start i chwila lotu w trybie aldhold czyli bez kompasu i dps-a ale z barometrem - żadnych złych objawów. OK
Ze względu na te lekkie bujanie nie obejdzie się bez pidowania - czegoś czego bardzo nie lubię.
Najpierw zrobiłem zrzut ekranu z pierwotnymi pidami.
Ustawiłem 7 kanał na autpidowanie i heja w górę.
Wszystko w trybie aldhold. Zaczął wiać spory boczny wiatr ale nie chciałem przerywać i tylko patrzyłem kiedy spadnie:))
Takiego dziwnego tańca jeszcze nie miałem, na takim wietrze jeszcze nigdy nie robiłem autotune:))
Miotało go nawet do 50 metrów w bok.
Bez urazy Kuczy ale pidowanie nie trwało pół roku a tylko 9 minut.:))
Wolę aby moje pidowanie robili profesjonaliści czyli AUTOTUNE.
Po autotune polatałem na ustawionych pidach i już go nie bujało - zaczął latać tak jak chciałem. Tym razem było dobrze.
Pidy po autotune
Pora teraz wyposażyć octo w jakieś gagety.:))

Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Podpowiedz jak uzyskałeś obraz na tablecie? Jakieś dongle czy cuś?:)
Wysłane z iPhone za pomocą Tapatalk
Wysłane z iPhone za pomocą Tapatalk
Moje zabawki: Syma X5SW ORANGE + TX MOD | Syma X8C MODDED | DJI F450 NaZa-GULL - RIP. | TBS Discovery NAZA-GuLL | DJI Phantom 3 ADV - SPRZEDANY | DJI Phantom 4 PRO
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr

Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Sorry chłopaki ale na zdjęciu widać odbicie a powinno być widać 3DR TOWER.
Teraz siedzę nad kamerką i nadajnikiem.
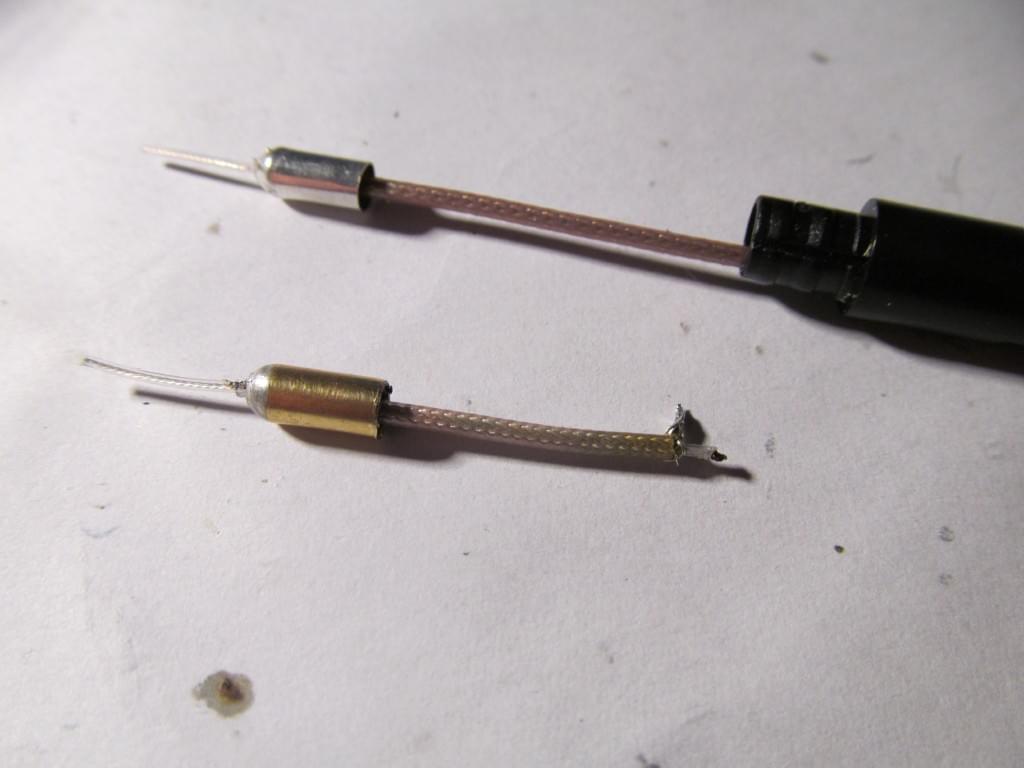
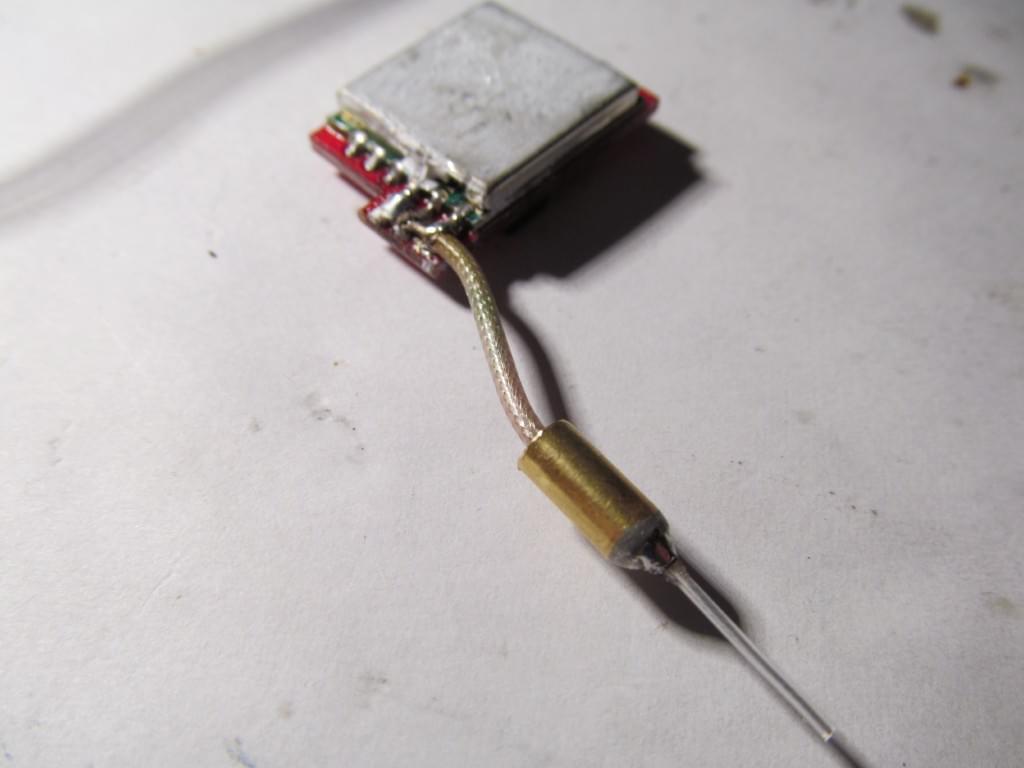
Na potrzeby tego projektu musiałem zmienić antenkę w nadajniku TS5828
Teraz siedzę nad kamerką i nadajnikiem.
Na potrzeby tego projektu musiałem zmienić antenkę w nadajniku TS5828
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Niestety ale mój TS5828 nie działa na 5V. Musiałem zastosować przetwornicę pomimo, iż ich nie lubię.
Napięcie dałem 10V ale nie zauważyłem aby mniej się grzał.
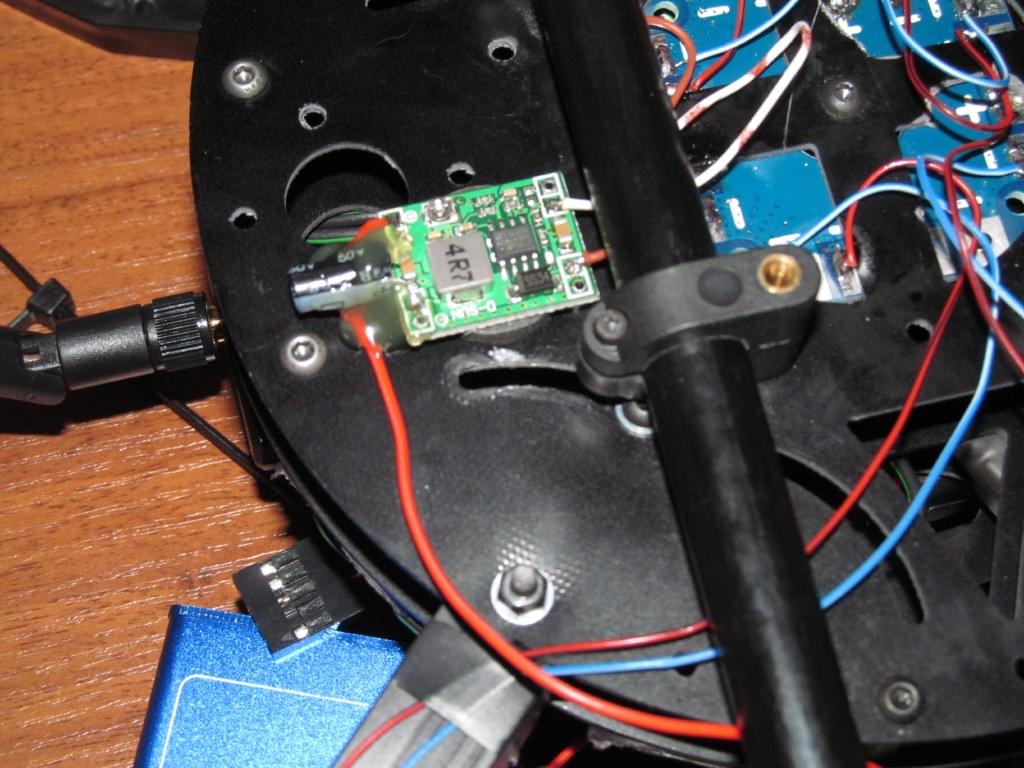
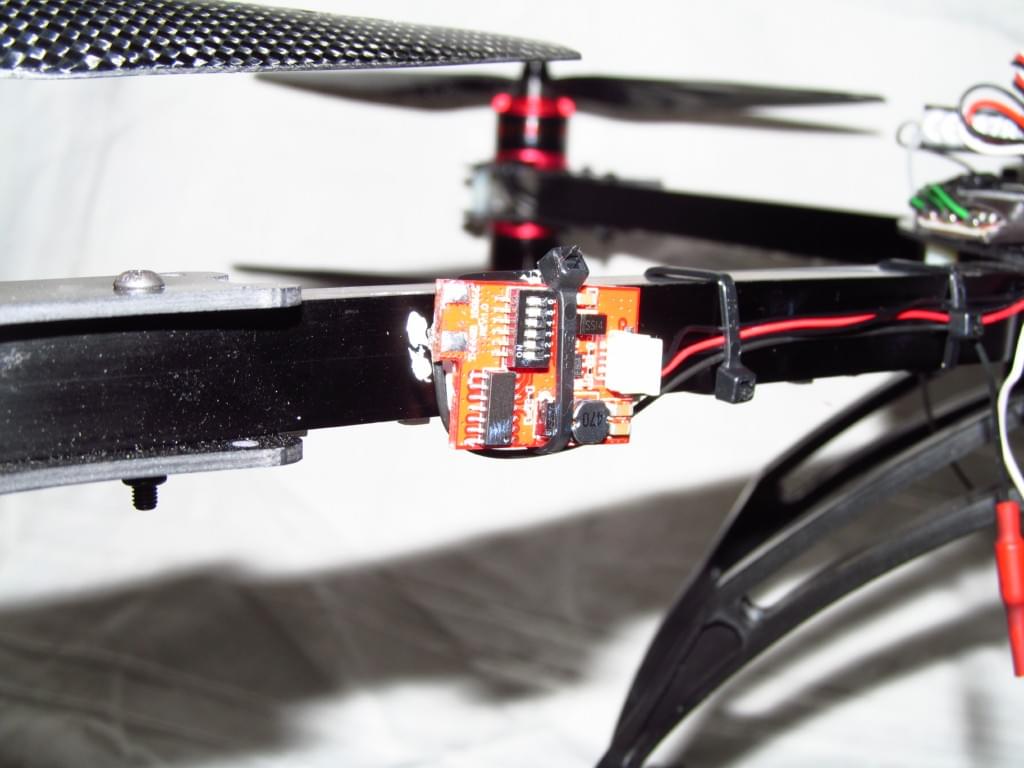
Nadajnik trafił na ramię pod śmigła i w tym miejscu będzie miał bardzo ładne chłodzenie.
Minim OSD zamontowane podłączone do taniej kamerki płytkowej.
Miała być SQ8 ale jeszcze nie dostałem odpowiedniej wtyczki, jak przyjdzie to ją wymienię i będę miał dodatkową rejestrację na karcie SD.
Mam jednak problem i nie wiem jak go rozwiązać.
Przy ustawieniach w osd NTSC lub PAL na ekranie pojawia się tylko obraz z kamery. Po ustawieniu na auto wszystko działa tak jak powinno.
Na monitorze LCD5800D na kanale bez nagrywarki obraz jest prawidłowy a na kanale z nagrywarką obcina mi dół. Zmiana NTSC i PAL nic nie daje. Dzieje się to tylko jak podłączona jest kamerka. bez kamerki obraz jest prawidłowy na obydwu kanałach. Sprawdzałem też inne kamerki płytkowe i na wszystkich jest tak samo.
Podejrzewam, że może to być wina kamerki która najprawdopodobniej jest w PAL ale nie jestem tego pewien. Na innych monitorach i goglach działa prawidłowo. problemem może być chyba niezgodność systemów.
Czy ktoś miał taki problem i udało mu się go rozwiązać?
Napięcie dałem 10V ale nie zauważyłem aby mniej się grzał.
Nadajnik trafił na ramię pod śmigła i w tym miejscu będzie miał bardzo ładne chłodzenie.
Minim OSD zamontowane podłączone do taniej kamerki płytkowej.
Miała być SQ8 ale jeszcze nie dostałem odpowiedniej wtyczki, jak przyjdzie to ją wymienię i będę miał dodatkową rejestrację na karcie SD.
Mam jednak problem i nie wiem jak go rozwiązać.
Przy ustawieniach w osd NTSC lub PAL na ekranie pojawia się tylko obraz z kamery. Po ustawieniu na auto wszystko działa tak jak powinno.
Na monitorze LCD5800D na kanale bez nagrywarki obraz jest prawidłowy a na kanale z nagrywarką obcina mi dół. Zmiana NTSC i PAL nic nie daje. Dzieje się to tylko jak podłączona jest kamerka. bez kamerki obraz jest prawidłowy na obydwu kanałach. Sprawdzałem też inne kamerki płytkowe i na wszystkich jest tak samo.
Podejrzewam, że może to być wina kamerki która najprawdopodobniej jest w PAL ale nie jestem tego pewien. Na innych monitorach i goglach działa prawidłowo. problemem może być chyba niezgodność systemów.
Czy ktoś miał taki problem i udało mu się go rozwiązać?
-
alkatras13
- Posty: 111
- Rejestracja: niedziela 07 cze 2015, 23:49
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
ja tak wlasnie mialem w xiaomi, mialem uciete czcionki albo na innym firmware wcale nie wyswietlilo osd, a jak wylaczylem kam wszystko wracało do normy, zmiana na PAL pomogla, moze zmień firmware i czcionki
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Sprawdziłem już chyba wszystko i nie mogę sobie z tym poradzić. A właściwie to sobie poradziłem - podniosłem wszystkie dane wyżej i już mam wszystko na ekranie:))
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Brawo Ty 
Czasami najprostsze rozwiązania są najlepsze
Czasami najprostsze rozwiązania są najlepsze
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Jesteś w stanie jakoś zmierzyć jaki ciąg daje całe ramie? Poczytałem wczoraj o cechach X8 względem płaskiego octo i często pojawiał się argument, że sprawność 2 silników jeden pod drugim jest około 20-30% niższa niż mierzone osobno, ale pisali też, że można zejść do 5-10% stosując ostrzejsze śmigło na dole i nie wiem też, czy nie inną jego średnicę. Bawiłeś się takimi rozwiązaniami czy raczej nie warto?
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octoquad. Octocopter 580 - fotorelacja ze składania.
Tak naprawdę nie ma dla mnie znaczenia moc obliczona. Jestem bardziej praktykiem niż teoretykiem i gdy taka konfiguracja coptera przy wadze 2,2kg daje mi THR_MID w granicach 330-340 czyli na granicy zalecanych ustawień to jestem z tego zadowolony. Nie jest dla mnie ważny czy ciąg ramienia ma 2kg czy 2,4kg.
Nigdy nie używałem kalkulatorów. Sprawdziłem tylko ciąg jednego silnika i już wszystko staje się jasne.
Tak więc 20% czy 5% w tego typu copterach nie ma żadnego znaczenia.
Inaczej jest w sprzęcie czysto PRO. Tam ma znaczenie każdy gram i każdy wat.
Ważne jest też to, że w zawisie cały system pobiera ok 20-21A.
Taki sam system z podobną wagą ale na hexie pobiera 23-24A.
Minusem znowu jest większa liczba elementów (silniki regulatory), więcej przewodzików do lutowania i większe prawdopodobieństwo złego przylutowania elementów, za to rama jest lżejsza.
Reasumując strata ciągu dla takiego sprzętu ze względu na budowę nie ma większego znaczenia.
Rama jest lżejsza o te 2 ramiona i jest duże prawdopodobieństwo rekompensaty mocy ze względu na wagę.
Nigdy nie używałem kalkulatorów. Sprawdziłem tylko ciąg jednego silnika i już wszystko staje się jasne.
Tak więc 20% czy 5% w tego typu copterach nie ma żadnego znaczenia.
Inaczej jest w sprzęcie czysto PRO. Tam ma znaczenie każdy gram i każdy wat.
Ważne jest też to, że w zawisie cały system pobiera ok 20-21A.
Taki sam system z podobną wagą ale na hexie pobiera 23-24A.
Minusem znowu jest większa liczba elementów (silniki regulatory), więcej przewodzików do lutowania i większe prawdopodobieństwo złego przylutowania elementów, za to rama jest lżejsza.
Reasumując strata ciągu dla takiego sprzętu ze względu na budowę nie ma większego znaczenia.
Rama jest lżejsza o te 2 ramiona i jest duże prawdopodobieństwo rekompensaty mocy ze względu na wagę.