Strona 206 z 212
Re: Autopilot by Zbig & Pitlab
: sobota 03 sie 2019, 07:23
autor: wladek77
W mini talonie z AP jak dodam mocno gaz to bardzo ostro samolot się wznosi, na połowie przepustnicy samolot leci względnie na jednej wysokości. W trybie autonomicznym trzyma wysokość nawet na nawrotach mało traci na wysokości. Przy przelaczaniu z auto na off nie ma zmian, samolot wyważony na wywazarce, CG 55mm. Czy to normalne jak w trybie stab przychylam model to lotki wysokości pracują, gdzie szukać przyczyny? Zmienić środek ciężkości czy może jakieś ustawienia w AP?
Re: Autopilot by Zbig & Pitlab
: sobota 03 sie 2019, 07:26
autor: Baqsthc
Trochę mało precyzyjnie piszesz. Przechylasz czy pochylasz, w ręce czy w czasie lotu? "ster wysokości" lotki są na skrzydłach. I co według Ciebie jest źle?
Re: Autopilot by Zbig & Pitlab
: sobota 03 sie 2019, 08:00
autor: wladek77
Jak w rece w trybie stabilizacji pochylam i przechylam model wszystko pracuje normalnie stabilizacja działa w każdym kierunku. Natomiast w czasie lotu model stabilizuje na boki poprawnie natomiast podczas zmian gazu model zdziera nos i na 3/4 gazu muszę korygować dragiem wysokości bo cały czas się wznosi.
Re: Autopilot by Zbig & Pitlab
: sobota 03 sie 2019, 10:01
autor: sajgon
Jak zwiększasz prędkość to zwiększa się siła nośna i model się wznosi, można to trochę zniwelować dobrze ustawiając środek ciężkości.
Re: Autopilot by Zbig & Pitlab
: sobota 03 sie 2019, 12:55
autor: wladek77
Nie mogę znaleźć opcji żeby to korygował AP przy tym modelu, przy skrzydle sa tylko dwie lotki i tam lepiej to wychodzi. Poprubuje ze środkiem ciężkości.
Re: Autopilot by Zbig & Pitlab
: sobota 03 sie 2019, 13:42
autor: marekj
Bez względu na model odpowiada za to siła stabilizacji pochylenia (pitch). Zdecydowanie jednak należy najpierw ustawić poprawnie model bez stabilizacji.
Re: Autopilot by Zbig & Pitlab
: wtorek 06 sie 2019, 11:31
autor: Zbig
W trybie stabilizacji autopilot nie stabilizuje wysokości i model na gazie powinien się wznosić (to jest jak najbardziej poprawne i pożądane zachowanie modelu). Jednak na stabilizacji model powinien wznosić się wyraźnie wolniej niż bez stabilizacji.
Możesz to wznoszenie w pewnym stopniu ograniczyć zwiększając stabilizację pochylenia, albo przesuwając środek ciężkości do tyłu i lekko trymując ster wysokości w dół. Ale wówczas powinieneś włączyć mikser OSD menu->Autopilot->AUTO->tryb gazu->gaz->wysokość, inaczej w trybie AUTO model może mieć problemy z utrzymywaniem wysokości.
edit: jest jeszcze jedna możliwość: włącz w nadajniku mikser gaz->wysokość opuszczający lekko wysokość wraz z gazem: przy dodawaniu gazu będzie Ci ograniczał wznoszenie.
Re: Autopilot by Zbig & Pitlab
: wtorek 12 lis 2019, 11:03
autor: Zbig
Jest już dostępna nowa wersja płytki autopilota, z nowym zestawem sensorów. Czas płynie, wcześniej produkowane elementy są wycofywane, a na ich miejsce wchodzą nowe. To czasem sporo zamieszania, szczególnie gdy pod koniec testów nowej płytki okazuje się, że kolejny czujnik przestaje być produkowany. Ale w końcu nowy zestaw jest gotowy i co cieszy nowe sensory nie tylko są mniejsze (co nie zawsze jest zaletą) ale mają też lepsze parametry. Wraz z nową płytką autopilota 1.3 jest też nowa wersja oprogramowania (2.71).
Tutaj ważna informacja dla posiadaczy starszych autopilotów: wersja 2.71 jest zgodna ze wszystkimi poprzednimi wersjami płytek AP.
Re: Autopilot by Zbig & Pitlab
: sobota 13 cze 2020, 00:41
autor: wrzech
Mam kłopot z wysterowaniem wyjść AUX. Sygnal to SBUS z eleresa. AUX 5 (ch11) działa poprawnie. AUX 4 (ch 10) już nie chce. W FPV Manager belki wychylają się zgodnie z poleceniem radia - AUX5 serwo działa, AUX4 nie rusza. Gdy zamienię wtyczki serwa, sytuacja się odwraca, więc mam pewność, że połączenie jest. Próbowałem już różnych cudów, zmiana kanałów w radio, zmiane w FPV Manager i nic. Na tym pinie serwo nie chce ruszyć. Gdy na żywca odpinam i podpinam ponownie -> serwo się wzbudza, ale zasilania nie podtrzymuje. Ewidentnie brak PWM. Podobnie z serwami pantilta; AUX3 działa, a AUX2 nie steruje, z tą różnicą, że tu zasilanie na serwie jest i stawia opór przy próbie poruszenia. Ktoś się spotkał z podobnym problemem?
Re: Autopilot by Zbig & Pitlab
: niedziela 14 cze 2020, 10:31
autor: darek_op
Jak ograniczyć wychylenia lotek w trybie STAB? Ograniczyłem w aparaturze wychylenia do 50%, ze względu na nerwowość modelu i tak sie wychylają w trybie OFF natomiast po przełączeniu w tryb STAB wychylają się w pełnym zakresie. Oczywiście model jest na stole i nie mówię tu o wychyleniach jako reakcji na pochylenia modelu.
Re: Autopilot by Zbig & Pitlab
: niedziela 14 cze 2020, 10:59
autor: Baqsthc
Kalibracja zakresu wychyleń w konfiguratorze na PC.
Re: Autopilot by Zbig & Pitlab
: niedziela 14 cze 2020, 16:50
autor: marekj
Kalibracja zakresu wychyleń w konfiguratorze na PC.
To jedno ale na początku należy wykorzystać możliwość regulacji mechanicznej na dźwigniach serw i sterów. Używając autopilota zawsze należy ustawić standardowy zakres wychyleń w nadajniku, bo to zapewnia największą precyzję sterowania.
Re: Autopilot by Zbig & Pitlab
: niedziela 14 cze 2020, 19:31
autor: wrzech
darek_op pisze:Jak ograniczyć wychylenia lotek w trybie STAB? Ograniczyłem w aparaturze wychylenia do 50%, ze względu na nerwowość modelu i tak sie wychylają w trybie OFF natomiast po przełączeniu w tryb STAB wychylają się w pełnym zakresie. Oczywiście model jest na stole i nie mówię tu o wychyleniach jako reakcji na pochylenia modelu.
Normalnie endpointami w aparaturze, tak żeby odpowiadało właśnie Twoim oczekiwaniom. Później kalibracje endpointow masz w fpv manager i to uruchamiasz.
Wysłane z mojego Redmi Note 7 przy użyciu Tapatalka
Re: Autopilot by Zbig & Pitlab
: niedziela 14 cze 2020, 20:39
autor: darek_op
Tutaj
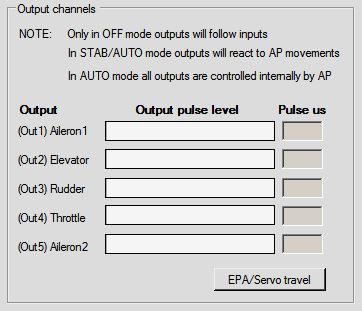
- Przechwytywanie.JPG (29.75 KiB) Przejrzano 7051 razy
Re: Autopilot by Zbig & Pitlab
: sobota 10 paź 2020, 12:17
autor: sajgon
Steruję swoim trzy osiowym pantitlem po przez AP sygnał CPPM i mam problem bo na fail-safe wywala mi serwa w skrajne pozycje, wcześniej jak miałem PPM nie miałem z tym problemu, jest jakiś sposób by to ustawić?
Chyb wiem AP ustawia ostatni stan na serwach znaczy ustawienie fail-safe na odbiorniku RC? Ale czy da radę z poziomu AP jakoś to regulować?