Dekoder z PPM/SBUS na PWM czyli na serwa by MIS
: piątek 26 cze 2015, 01:47
Zamarudzony przez pewnego jegomościa zaczynam pracę nad takim ustroistwem.
Niby jest takich wynalazków sporo, ale ten ma być inny - lepszy.
Założenia:
-Wejście sygnału PPM (do 16CH) lub S-BUS (do 16CH) - autodetekcja sygnału wejściowego.
-Wyjścia na max 12 serw. Trzy zestawy po 4 serwa.
-Dowolne konfigurowanie (przypisanie) kanału z PPM/S-BUS na wyście (mapowanie kanałów).
-Konfigurowalna funkcja spowalniania serw.
-Konfigurowalny rewers dla poszczególnych serw.
-Konfigurowalny offset i endpointy dla poszczególnych serw.
-Konfigurowalny servo extender dla poszczególnych serw.
-Małe wymiary - płytka 26x22mm - wyjścia na płasko (idealne do wsadzenia np w skrzydło modelu).
-Po 4 kanały z trzech stron, plus wejście PPM/S-BUS i UART z czwartej strony.
-4 warstwowa płytka dla porządnego rozprowadzenia zasilania i masy do serw
-Dwie prędkości odświeżania serw - standard 20ms (50Hz) oraz turbo 14ms (70Hz)
-Możliwość podłączenia kilku takich dekoderów w jednym modelu (np. każde skrzydło ma swój dekoder sterujący wszystkimi serwami w danym skrzydle z możliwością przypisania funkcji i ustawiania rewersów dla danego serwa z dowolnie wybranego kanału RC).
-Konfiguracja z komputera PC przy pomocy interfejsu USB/RS232 (np. FTDI lub dedykowany z kabelkiem).
-Sygnalizacja stanu przy pomocy diody LED.
Oferta sprzedaży TUTAJ.
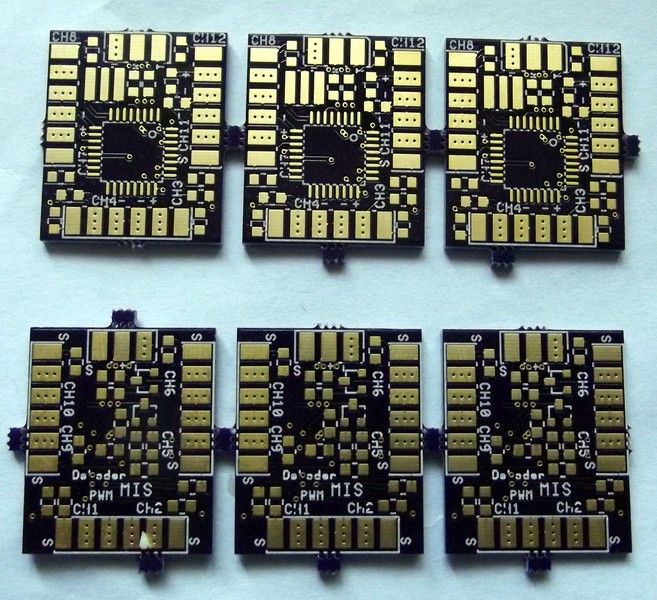
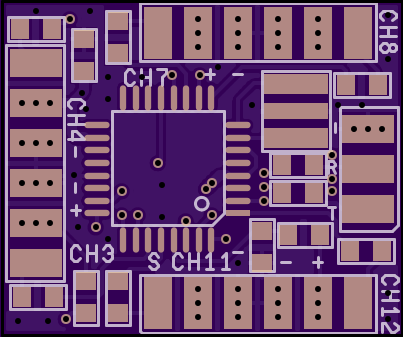
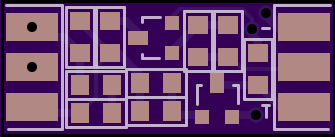
Rendery prototypowych płytek:
 ........
........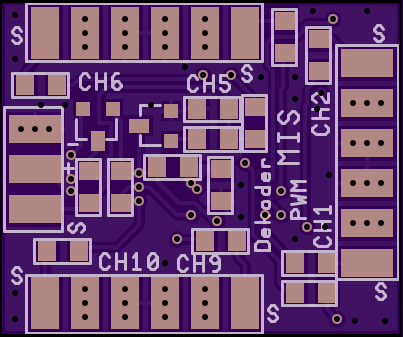
Jak widać, dość mocno upchane, pamiętając że to 2.6 x 2.2cm.
****************************************************************************************************************************************************************************************
Tyle wstępu, teraz konkrety.
****************************************************************************************************************************************************************************************
Oprogramowanie do pobrania:
- Firmware dekodera v0.12 i v1.12. - Poprawiono błąd współpracy z niektórymi odbiornikami FrSky w trybie S.BUS - dekoder po krótkim czasie przestawał rozpoznawać sygnał S.BUS z tych odbiorników. Komplet wraz z konfiguratorem v1.11
UWAGA!!! Do dekoderów z fabrycznie wgranym firmware v0.xx można wgrywać tylko firmware v0.xx. Do dekoderów z fabrycznie wgranym firmware v1.xx można wgrywać tylko firmware v1.xx. Pomyłka spowoduje niedziałanie dekodera i konieczność wgrania właściwego firmware w trybie awaryjnym.
- Sterowniki do interfejsu USB.
- Program konfiguracyjny do dekodera v1.11. - kompatybilność z nową serią dekoderów z firmware 1.11.
****************************************************************************************************************************************************************************************
A tu powoli zacznę opisywać co i jak.
Na początek, tak wygląda ścieżka sygnału z kanału RC na wyjście dla serwa:
Kanał RC -> Mapowanie numeru wyjścia -> Rewers -> Funkcja slow -> Offset -> Konfigurowalne endpointy -> Servo extender -> Absolutne endpointy -> Wyjście na serwo.
W tej kolejności wprowadzane są modyfikacje do sygnału z odbiornika RC.
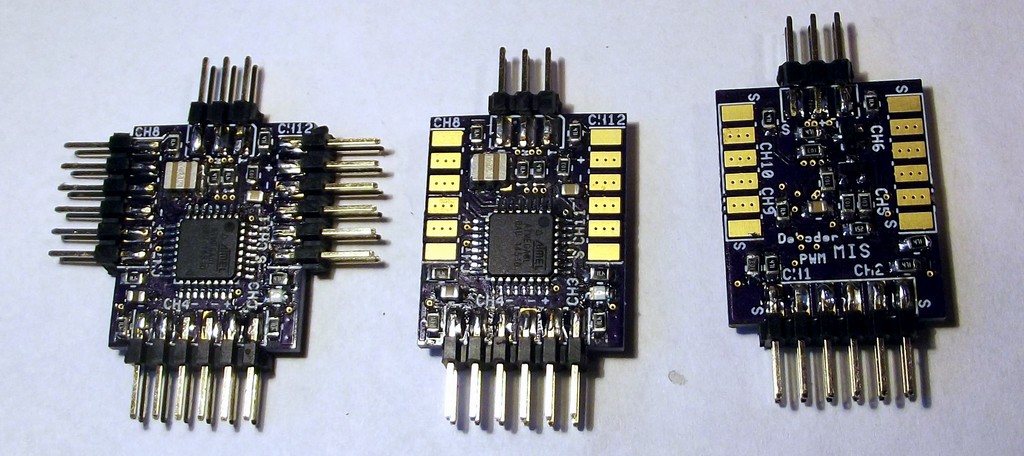
1. Podłączenia serw:
W wersji na 4 kanały wygląda to tak:
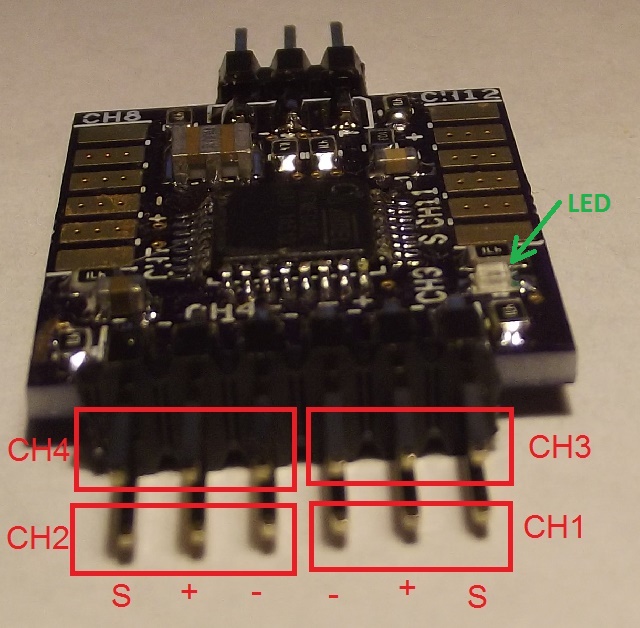
Oczywiście opisy CH1..CH4 są równoważne z numeracją wyjść, czyli Servo1..4 w konfiguratorze.
Zaznaczona dioda LED sygnalizuje:
- Wolne mruganie - jest zasilanie, nie ma sygnału S.BUS lub PPM.
- Podwójne błyski - odbierany jest sygnał z odbiornika RC - dekoder pracuje prawidłowo.
- Szybkie mruganie - dekoder połączony z komputerem PC i konfiguratorem. Tylko wybrany dekoder mruga szybko.
- Ciągłe świecenie - Odbiornik S.BUS wysyła flagę "failsafe". Wyjścia ustawiają się zgodnie z tym co wysyła odbiornik. Jedyna różnica w stosunku do normalnej pracy to sygnalizacja diodą. Serwa nadal uwzględniają przesyłane dane.
- Ciągłe świecenie cały czas i brak działania dekodera - Fatal Error, utrata wszystkich kopii ustawień. Wymaga ponownego zaprogramowania dekodera - mam nadzieję że nikomu nigdy się nie przydarzy. Może się pojawić po aktualizacji oprogramowania w którym zmieniono layout konfiguracji. Wtedy należy od nowa poustawiać konfigurację dekodera. Oczywiście przy takowej aktualizacji będzie opis z ostrzeżeniem że konfiguracja zostanie skasowana.
W wersji na 8 lub 12 kanałów dochodzą wyjścia z boków:
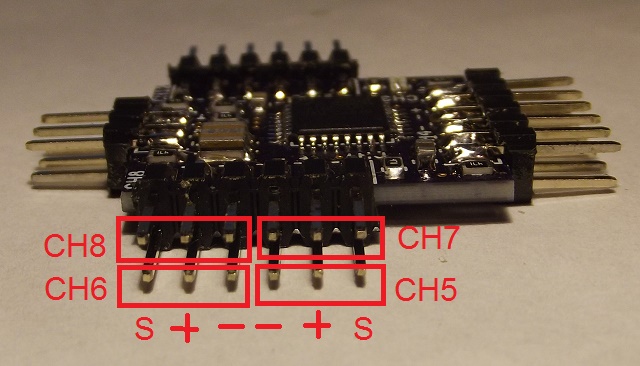

Tu nie ma filozofii, podłączamy serwa i tyle. Wyjątek stanowią wyjścia CH11 i CH12 które potrafią więcej. Ale o tym później, przy opisie funkcji "Wyjścia binarne"
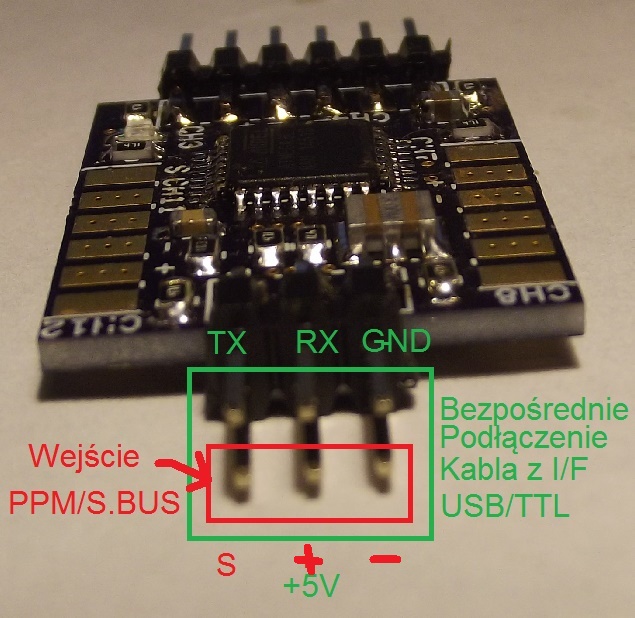
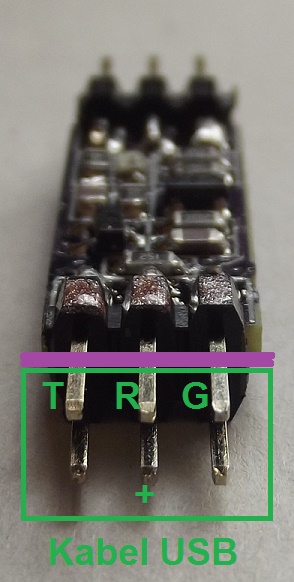
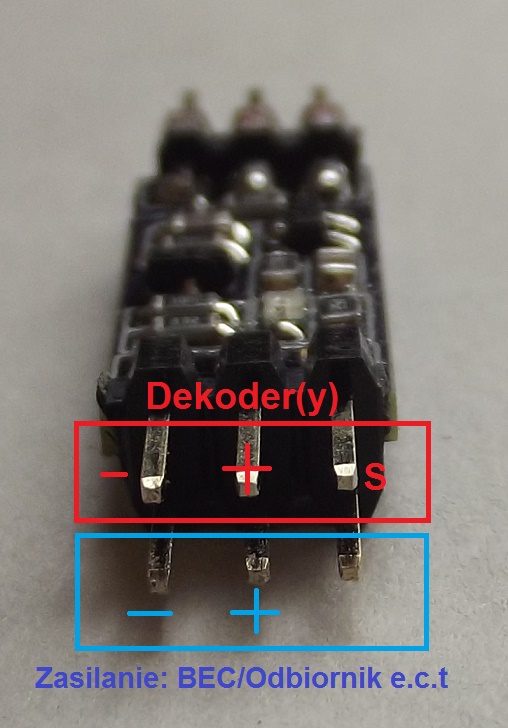
2. Złącze wejściowe:
Z drugiej kanty płytki sterczy 6 pinowe złącze wejściowe. Ma ono podwójną funkcję.
1 - Podłączamy tam sygnał S.BUS lub PPM oraz zasilanie do serw podłączonych do dekodera za pomocą standardowej 3-pinowej wtyczki. Oznaczone na czerwono na zdjęciu.
2 - Podłączamy tam kabelek interfejsu USB/RS jeśli nie używamy dodatkowego adaptera RS (na zdjęciu na zielono). W tym przypadku dekoder zasilony jest z komputera PC poprzez interfejs USB.
Dodatkowy adapter umożliwia komunikację PC z jednym lub kilkoma dekoderami zamontowanymi w modelu bez konieczności ich odłączania od wspólnej magistrali, a także umożliwia testowanie wszystkich podłączonych do dekodera serw.
Jeśli mamy łatwy dostęp do dekoder(a)(ów) to nie ma potrzeby stosowania adaptera. Można kabel USB podpiąć wprost do dekodera (po wcześniejszym odłączeniu wtyczki z sygnałem S.BUS/PPM i odłączeniu serw - można zostawić jedno serwo podłączone - tyle jest w stanie zasilić port USB w PC).
Kabelek z interfejsu USB ma jedną stronę wtyczki zaznaczoną, i tą stronę należy wpiąć do góry płytki (w stronę z procesorem), lub do przejściówki w stronę z elementami SMD. Odwrotne podłączenie niczego nie uszkodzi, ale też oczywiście nie będzie działać.
Jakby się komuś wypięła wtyczka od strony interfejsu USB, to informuję że ma być włożona zatrzaskami blaszek (czyli tą stroną gdzie widać blaszki) do strony z elementami interfejsu, czyli w górę.
Do połączenia dekodera z odbiornikiem zalecam stosować przewody 22AWG lub grubsze - w końcu tym jednym przewodem zasilane jest kilka serw !.
Przy podłączaniu interfejsu USB bezpośrednio do dekodera zaleca się odłączenie serw, ponieważ zostaną one zasilone z komputera PC poprzez interfejs, co może się nie spodobać portowi USB z powodu zbyt dużego poboru prądu.
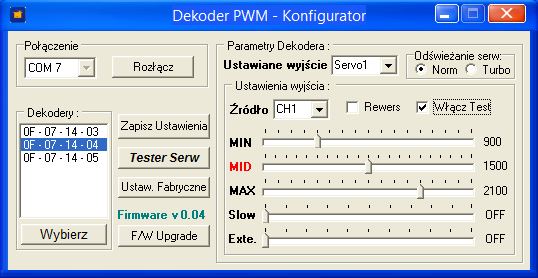
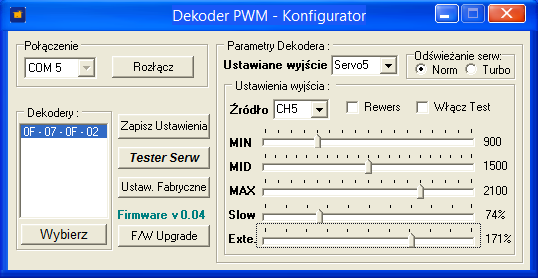
3. Konfigurator:
Wygląda tak:
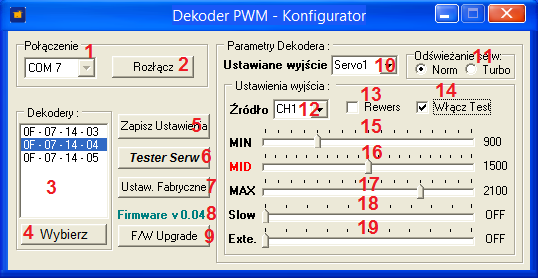
1 - Wybór portu COM na którym zainstalował się nasz interfejs. Wybór zostanie zapamiętany i nie trzeba za każdym razem wybierać portu.
2 - Przycisk Połącz/Rozłącz. Po kliknięciu w Połącz w oknie 3 powinny się pojawić numery seryjne wykrytych dekoderów.
3 - Lista wykrytych dekoderów podłączonych do wspólnej magistrali (więcej niż jeden tylko przy pomocy płytki z przejściówką).
Zaznaczamy na liście dekoder który chcemy konfigurować i klikamy przycisk 4.
4 - Powoduje połączenie się z wybranym dekoderem i odczyt jego konfiguracji. Dioda LED na wybranym dekoderze zaczyna mrugać szybko, a opis przycisku zmienia się na numer wybranego dekodera. Ponowne kliknięcie w ten przycisk spowoduje ponowne odczytanie danych z dekodera i anulowanie zrobionych wcześniej zmian w ustawieniach.
5 - Zapis ustawień do pamięci nieulotnej dekodera. Po dokonaniu wszystkich ustawień należy kliknąć ten knefel.
6 - Uruchomienie funkcji testera serw. W tym momencie PC emuluje 16 kanałową aparaturę i pozwala na przetestowanie całego systemu podłączonych dekoderów (nawet wraz z regulatorem silnika jeśli jest to regulator na S.BUS i jest wpięty do wspólnej magistrali).
7 - Załadowanie do wybranego dekodera ustawień fabrycznych.
8 - Wersja Firmware wybranego dekodera. Pojawia się po kliknięciu w "Wybierz" i odczytaniu konfiguracji z wybranego dekodera.
UWAGA!!! Do dekoderów z fabrycznie wgranym firmware v0.xx można wgrywać tylko firmware v0.xx. Do dekoderów z fabrycznie wgranym firmware v1.xx można wgrywać tylko firmware v1.xx. Pomyłka spowoduje niedziałanie dekodera i konieczność wgrania właściwego firmware w trybie awaryjnym.
9 - Aktualizacja Firmware dekodera. Są możliwe dwa tryby aktualizacji:
. . . 1 - łączymy się z danym dekoderem (przycisk "Wybierz" - 4) po czym klikamy w aktualizację, wybieramy plik z nowym firmware i potwierdzamy. Proces przebiega automatycznie.
. . . 2 - klikamy aktualizację zaraz po kliknięciu w "Połącz" (tryb awaryjny). Wymaga odłączenia i ponownego podłączenia zasilania dekodera(wtyczki interfejsu). Ten tryb można użyć tylko do aktualizacji jednego dekodera podłączonego wprost do interfejsu USB.
10 - Wybór wyjścia (serwa) które chcemy konfigurować. Przy przejściu do kolejnego serwa nie ma konieczności zapisywania ustawień. Wystarczy to zrobić raz, po skonfigurowaniu wszystkich serw.
11 - Wybór szybkości odświerzania serw. Normal : 20ms (50Hz), Turbo : 14ms (70Hz). Wspólna dla wszystkich serw.
12 - Źródło danych (numer kanału RC) dla wybranego (punkt 10) serwa.
13 - Włączenie rewersu dla wybranego serwa.
14 - Włączenie testowania wybranego serwa. Po zaznaczeniu tego ptaka dekoder włącza sygnały na serwa, i dla wybranego numeru wysyła w odstępie 2 sekundowym pozycje ustawione kolejno jako MIN (15), MID (16), MAX (17). Regulując suwakami 15..19 oraz zmieniając rewers widać od razu (znaczy się z niewielkim opóźnieniem) jaki mają one wpływ na pozycje i zachowanie serwa, widać prędkość spowolnienia ect. Zmiana numeru serwa (10) powoduje automatyczne wyłączenie testu.
Dla serw 11 i 12 opcja testu nie jest dostępna, i zmienia się w opcje włączenia trybu binarnego wyjścia. Opis później.
15 - Endpoint Minimum. Serwo nigdy nie przesunie się dalej w stronę minimum. Wyjątek stanowi włączenie Serwo Extendera (suwakiem 19), który wprowadza swój mnożnik pozycji PO ustawieniu endpointów.
16 - Offset (trym) pozycji neutralnej dla serwa.
17 - Endpoint Maksimum. Serwo nigdy nie przesunie się dalej w stronę Maksimum. Wyjątek stanowi włączenie Serwo Extendera (suwakiem 19), który wprowadza swój mnożnik pozycji PO ustawieniu endpointów.
18 - Włączenie i ustawienie spowalniacza pracy serwa. Czym bardziej w prawo tym wolniej pracuje serwo. Ustawienie szybkości widać dobrze po włączeniu testu (14).
19 - Włączenie i ustawienie ekstendera zakresu dla serwa. Używając tej opcji możemy zmusić większość serw do pracy w zakresie 180 stopni, przy zwykłym sterowaniu typu 1100-1900us. Ustawienie mnożnika widać dobrze po włączeniu testu (14).
4. Wyjścia binarne:
Istnieje możliwość zmiany trybu pracy wyjść Servo11 i Serwo12 (albo oba na raz albo żadne) na tryb binarny.
Co to oznacza: Ano możliwość podłączenia wprost jakiegoś oświetlenia, czy zrzutu bomb sterowanego zwykłym pojawieniem się napięcia 5V na wyjściu Servo11 lub/i Servo12. Aby użyć tej funkcji należy zaznaczyć ptaka "Tryb binarny" w konfiguratorze. Daje to taki efekt:
sterowanego zwykłym pojawieniem się napięcia 5V na wyjściu Servo11 lub/i Servo12. Aby użyć tej funkcji należy zaznaczyć ptaka "Tryb binarny" w konfiguratorze. Daje to taki efekt:
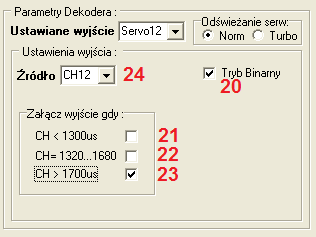
20 - Zaznaczenie tego ptaka powoduje włączenie trybu binarnego na wyjściu 11 i 12 jednocześnie. Ta opcja musi współgrać z zaznaczeniem jednego lub kilku ptaków 21,22,23 dla wyjścia 11 i/lub 12. Jeśli nie zaznaczymy żadnego, to zostanie automatycznie wyłączona.
21 - Napięcie na danym wyjściu pojawia się gdy na wybranym opcją 24 kanale RC jest sygnał poniżej 1300us.
22 - Napięcie na danym wyjściu pojawia się gdy na wybranym opcją 24 kanale RC jest sygnał od 1320us do 1680us.
23 - Napięcie na danym wyjściu pojawia się gdy na wybranym opcją 24 kanale RC jest sygnał powyżej 1700us.
24 - Źródło danych (numer kanału RC) dla wybranego (punkt 10) wyjścia binarnego.
Sygnał o wartościach pomiędzy, czyli 1300..1319 i 1681..1700us nie zmienia napięcia na wyjściu, czyli jeśli było napięcie, to w tych przedziałach sygnału dalej jest. Jest to zabezpieczenie przez przypadkowymi zmianami z powodu szumów, drżenia sygnału ect (takzwana histereza).
Można załączyć jednocześnie jedną, dwie lub wszystkie 3 opcje (co nie ma sensu, bo zawsze będzie napięcie na wyjściu).
Tak więc załączenie opcji 21 i 23 spowoduje że jeśli przykładowo drążek czy potencjometr będzie na środku to napięcia na wyjściu nie będzie. Przechylenie w którąkolwiek stronę spowoduje załączenie wyjścia, a powrót na środek - ponowne wyłączenie.
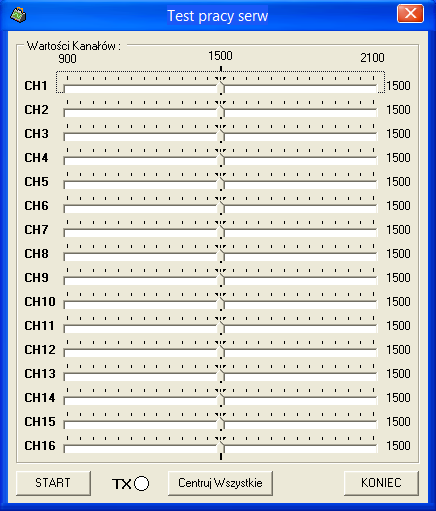
5. Tester serw:
Po kliknięciu w przycisk (6) na głównym ekranie zostaje uruchomiony emulator sygnału S.BUS.
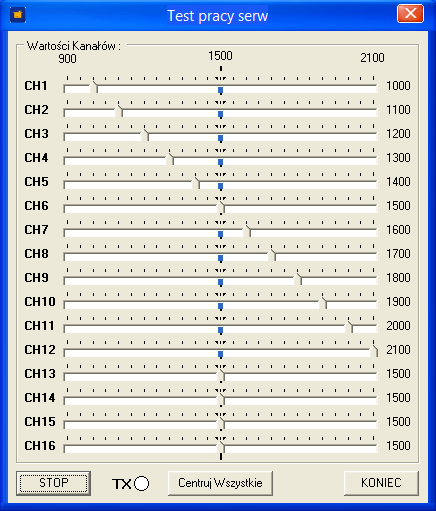
Pozwala on na sterowanie każdym z 16 kanałów S.BUS z osobna przy pomocy suwaków i zadawania dowolnych pozycji. Wysyłanie danych S.BUS zaczyna się po kliknięciu w przycisk "START". Tester potrafi wysterować dowolne urządzenia zgodne z S.BUS, czyli np ESC lub ordynarne serwa S.BUS. Wysyłanie danych potwierdza mruganie kontrolki TX.
Jeśli mamy kilka dekoderów na wspólnej magistrali, to na ten test będą reagować wszystkie, czyli tak jakby dostawały sygnał S.BUS z nadajnika RC.
6. Przejściówka S.BUS:
Wygląda tak:
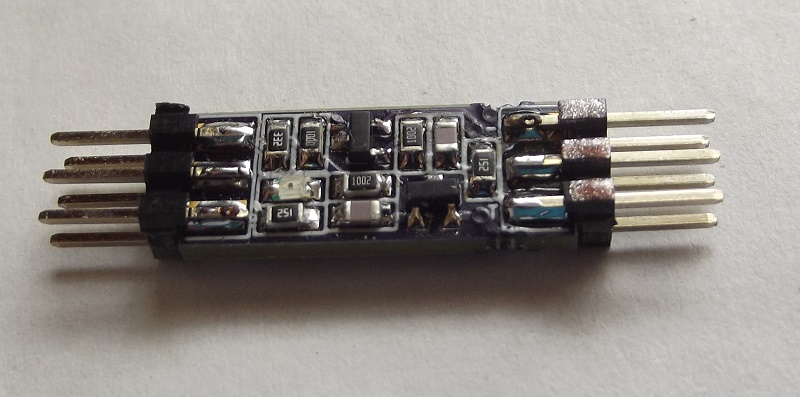
Dodatkowa przejściówka S.BUS nie jest konieczna do zaprogramowania dekodera. Do tego wystarczy sam interfejs USB/TTL i kabelek który jest w zestawie z interfejsem podłączony do 6 pinowego złącza w dekoderze.
Kiedy może się nam przydać przejściówka:
1. Jeśli w modelu mamy zainstalowane kilka dekoderów i chcemy je konfigurować/testować bez wymontowywania ich z modelu.
2. Jeśli dekoder zamontowany jest w miejscu trudno dostępnym, a mamy łatwy dostęp do odbiornika RC czy autopilota który steruje dekoderem.
3. Chcemy użyć funkcji "Tester serw" z konfiguratora przy podłączonych kilku serwach - wtedy zasilanie z portu USB nie da rady zasilić serw, no i niezbędna będzie przejściówka i zasilanie z BEC'a. Choć ten przypadek można obejść podłączając dowolny BEC 5V do dowolnego wolnego wyjścia dekodera, i w ten sposób serwa zostaną zasilone z BEC'a a nie z USB.
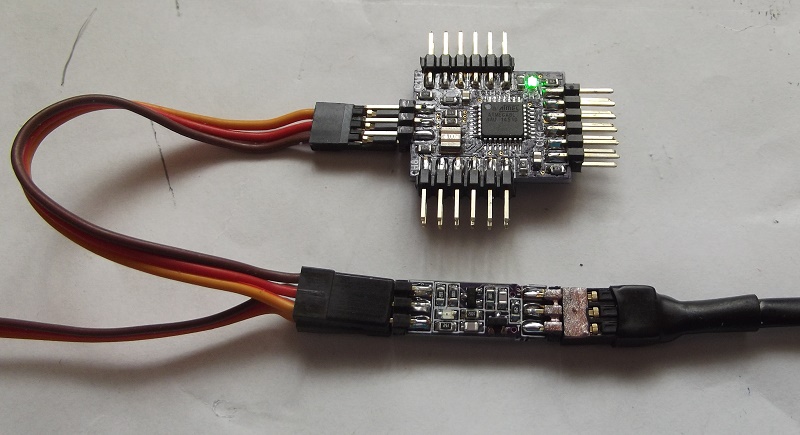
Podłącza się ją tak:
 ...
...
No i po połączeniu (na stole) całość wygląda tak:
......
......
c.d.n.
Niby jest takich wynalazków sporo, ale ten ma być inny - lepszy.
Założenia:
-Wejście sygnału PPM (do 16CH) lub S-BUS (do 16CH) - autodetekcja sygnału wejściowego.
-Wyjścia na max 12 serw. Trzy zestawy po 4 serwa.
-Dowolne konfigurowanie (przypisanie) kanału z PPM/S-BUS na wyście (mapowanie kanałów).
-Konfigurowalna funkcja spowalniania serw.
-Konfigurowalny rewers dla poszczególnych serw.
-Konfigurowalny offset i endpointy dla poszczególnych serw.
-Konfigurowalny servo extender dla poszczególnych serw.
-Małe wymiary - płytka 26x22mm - wyjścia na płasko (idealne do wsadzenia np w skrzydło modelu).
-Po 4 kanały z trzech stron, plus wejście PPM/S-BUS i UART z czwartej strony.
-4 warstwowa płytka dla porządnego rozprowadzenia zasilania i masy do serw
-Dwie prędkości odświeżania serw - standard 20ms (50Hz) oraz turbo 14ms (70Hz)
-Możliwość podłączenia kilku takich dekoderów w jednym modelu (np. każde skrzydło ma swój dekoder sterujący wszystkimi serwami w danym skrzydle z możliwością przypisania funkcji i ustawiania rewersów dla danego serwa z dowolnie wybranego kanału RC).
-Konfiguracja z komputera PC przy pomocy interfejsu USB/RS232 (np. FTDI lub dedykowany z kabelkiem).
-Sygnalizacja stanu przy pomocy diody LED.
Oferta sprzedaży TUTAJ.
Rendery prototypowych płytek:
........Jak widać, dość mocno upchane, pamiętając że to 2.6 x 2.2cm.
****************************************************************************************************************************************************************************************
Tyle wstępu, teraz konkrety.
****************************************************************************************************************************************************************************************
Oprogramowanie do pobrania:
- Firmware dekodera v0.12 i v1.12. - Poprawiono błąd współpracy z niektórymi odbiornikami FrSky w trybie S.BUS - dekoder po krótkim czasie przestawał rozpoznawać sygnał S.BUS z tych odbiorników. Komplet wraz z konfiguratorem v1.11
UWAGA!!! Do dekoderów z fabrycznie wgranym firmware v0.xx można wgrywać tylko firmware v0.xx. Do dekoderów z fabrycznie wgranym firmware v1.xx można wgrywać tylko firmware v1.xx. Pomyłka spowoduje niedziałanie dekodera i konieczność wgrania właściwego firmware w trybie awaryjnym.
- Sterowniki do interfejsu USB.
- Program konfiguracyjny do dekodera v1.11. - kompatybilność z nową serią dekoderów z firmware 1.11.
****************************************************************************************************************************************************************************************
A tu powoli zacznę opisywać co i jak.
Na początek, tak wygląda ścieżka sygnału z kanału RC na wyjście dla serwa:
Kanał RC -> Mapowanie numeru wyjścia -> Rewers -> Funkcja slow -> Offset -> Konfigurowalne endpointy -> Servo extender -> Absolutne endpointy -> Wyjście na serwo.
W tej kolejności wprowadzane są modyfikacje do sygnału z odbiornika RC.
1. Podłączenia serw:
W wersji na 4 kanały wygląda to tak:
Oczywiście opisy CH1..CH4 są równoważne z numeracją wyjść, czyli Servo1..4 w konfiguratorze.
Zaznaczona dioda LED sygnalizuje:
- Wolne mruganie - jest zasilanie, nie ma sygnału S.BUS lub PPM.
- Podwójne błyski - odbierany jest sygnał z odbiornika RC - dekoder pracuje prawidłowo.
- Szybkie mruganie - dekoder połączony z komputerem PC i konfiguratorem. Tylko wybrany dekoder mruga szybko.
- Ciągłe świecenie - Odbiornik S.BUS wysyła flagę "failsafe". Wyjścia ustawiają się zgodnie z tym co wysyła odbiornik. Jedyna różnica w stosunku do normalnej pracy to sygnalizacja diodą. Serwa nadal uwzględniają przesyłane dane.
- Ciągłe świecenie cały czas i brak działania dekodera - Fatal Error, utrata wszystkich kopii ustawień. Wymaga ponownego zaprogramowania dekodera - mam nadzieję że nikomu nigdy się nie przydarzy. Może się pojawić po aktualizacji oprogramowania w którym zmieniono layout konfiguracji. Wtedy należy od nowa poustawiać konfigurację dekodera. Oczywiście przy takowej aktualizacji będzie opis z ostrzeżeniem że konfiguracja zostanie skasowana.
W wersji na 8 lub 12 kanałów dochodzą wyjścia z boków:
Tu nie ma filozofii, podłączamy serwa i tyle. Wyjątek stanowią wyjścia CH11 i CH12 które potrafią więcej. Ale o tym później, przy opisie funkcji "Wyjścia binarne"
2. Złącze wejściowe:
Z drugiej kanty płytki sterczy 6 pinowe złącze wejściowe. Ma ono podwójną funkcję.
1 - Podłączamy tam sygnał S.BUS lub PPM oraz zasilanie do serw podłączonych do dekodera za pomocą standardowej 3-pinowej wtyczki. Oznaczone na czerwono na zdjęciu.
2 - Podłączamy tam kabelek interfejsu USB/RS jeśli nie używamy dodatkowego adaptera RS (na zdjęciu na zielono). W tym przypadku dekoder zasilony jest z komputera PC poprzez interfejs USB.
Dodatkowy adapter umożliwia komunikację PC z jednym lub kilkoma dekoderami zamontowanymi w modelu bez konieczności ich odłączania od wspólnej magistrali, a także umożliwia testowanie wszystkich podłączonych do dekodera serw.
Jeśli mamy łatwy dostęp do dekoder(a)(ów) to nie ma potrzeby stosowania adaptera. Można kabel USB podpiąć wprost do dekodera (po wcześniejszym odłączeniu wtyczki z sygnałem S.BUS/PPM i odłączeniu serw - można zostawić jedno serwo podłączone - tyle jest w stanie zasilić port USB w PC).
Kabelek z interfejsu USB ma jedną stronę wtyczki zaznaczoną, i tą stronę należy wpiąć do góry płytki (w stronę z procesorem), lub do przejściówki w stronę z elementami SMD. Odwrotne podłączenie niczego nie uszkodzi, ale też oczywiście nie będzie działać.
Jakby się komuś wypięła wtyczka od strony interfejsu USB, to informuję że ma być włożona zatrzaskami blaszek (czyli tą stroną gdzie widać blaszki) do strony z elementami interfejsu, czyli w górę.
Do połączenia dekodera z odbiornikiem zalecam stosować przewody 22AWG lub grubsze - w końcu tym jednym przewodem zasilane jest kilka serw !.
Przy podłączaniu interfejsu USB bezpośrednio do dekodera zaleca się odłączenie serw, ponieważ zostaną one zasilone z komputera PC poprzez interfejs, co może się nie spodobać portowi USB z powodu zbyt dużego poboru prądu.
3. Konfigurator:
Wygląda tak:
1 - Wybór portu COM na którym zainstalował się nasz interfejs. Wybór zostanie zapamiętany i nie trzeba za każdym razem wybierać portu.
2 - Przycisk Połącz/Rozłącz. Po kliknięciu w Połącz w oknie 3 powinny się pojawić numery seryjne wykrytych dekoderów.
3 - Lista wykrytych dekoderów podłączonych do wspólnej magistrali (więcej niż jeden tylko przy pomocy płytki z przejściówką).
Zaznaczamy na liście dekoder który chcemy konfigurować i klikamy przycisk 4.
4 - Powoduje połączenie się z wybranym dekoderem i odczyt jego konfiguracji. Dioda LED na wybranym dekoderze zaczyna mrugać szybko, a opis przycisku zmienia się na numer wybranego dekodera. Ponowne kliknięcie w ten przycisk spowoduje ponowne odczytanie danych z dekodera i anulowanie zrobionych wcześniej zmian w ustawieniach.
5 - Zapis ustawień do pamięci nieulotnej dekodera. Po dokonaniu wszystkich ustawień należy kliknąć ten knefel.
6 - Uruchomienie funkcji testera serw. W tym momencie PC emuluje 16 kanałową aparaturę i pozwala na przetestowanie całego systemu podłączonych dekoderów (nawet wraz z regulatorem silnika jeśli jest to regulator na S.BUS i jest wpięty do wspólnej magistrali).
7 - Załadowanie do wybranego dekodera ustawień fabrycznych.
8 - Wersja Firmware wybranego dekodera. Pojawia się po kliknięciu w "Wybierz" i odczytaniu konfiguracji z wybranego dekodera.
UWAGA!!! Do dekoderów z fabrycznie wgranym firmware v0.xx można wgrywać tylko firmware v0.xx. Do dekoderów z fabrycznie wgranym firmware v1.xx można wgrywać tylko firmware v1.xx. Pomyłka spowoduje niedziałanie dekodera i konieczność wgrania właściwego firmware w trybie awaryjnym.
9 - Aktualizacja Firmware dekodera. Są możliwe dwa tryby aktualizacji:
. . . 1 - łączymy się z danym dekoderem (przycisk "Wybierz" - 4) po czym klikamy w aktualizację, wybieramy plik z nowym firmware i potwierdzamy. Proces przebiega automatycznie.
. . . 2 - klikamy aktualizację zaraz po kliknięciu w "Połącz" (tryb awaryjny). Wymaga odłączenia i ponownego podłączenia zasilania dekodera(wtyczki interfejsu). Ten tryb można użyć tylko do aktualizacji jednego dekodera podłączonego wprost do interfejsu USB.
10 - Wybór wyjścia (serwa) które chcemy konfigurować. Przy przejściu do kolejnego serwa nie ma konieczności zapisywania ustawień. Wystarczy to zrobić raz, po skonfigurowaniu wszystkich serw.
11 - Wybór szybkości odświerzania serw. Normal : 20ms (50Hz), Turbo : 14ms (70Hz). Wspólna dla wszystkich serw.
12 - Źródło danych (numer kanału RC) dla wybranego (punkt 10) serwa.
13 - Włączenie rewersu dla wybranego serwa.
14 - Włączenie testowania wybranego serwa. Po zaznaczeniu tego ptaka dekoder włącza sygnały na serwa, i dla wybranego numeru wysyła w odstępie 2 sekundowym pozycje ustawione kolejno jako MIN (15), MID (16), MAX (17). Regulując suwakami 15..19 oraz zmieniając rewers widać od razu (znaczy się z niewielkim opóźnieniem) jaki mają one wpływ na pozycje i zachowanie serwa, widać prędkość spowolnienia ect. Zmiana numeru serwa (10) powoduje automatyczne wyłączenie testu.
Dla serw 11 i 12 opcja testu nie jest dostępna, i zmienia się w opcje włączenia trybu binarnego wyjścia. Opis później.
15 - Endpoint Minimum. Serwo nigdy nie przesunie się dalej w stronę minimum. Wyjątek stanowi włączenie Serwo Extendera (suwakiem 19), który wprowadza swój mnożnik pozycji PO ustawieniu endpointów.
16 - Offset (trym) pozycji neutralnej dla serwa.
17 - Endpoint Maksimum. Serwo nigdy nie przesunie się dalej w stronę Maksimum. Wyjątek stanowi włączenie Serwo Extendera (suwakiem 19), który wprowadza swój mnożnik pozycji PO ustawieniu endpointów.
18 - Włączenie i ustawienie spowalniacza pracy serwa. Czym bardziej w prawo tym wolniej pracuje serwo. Ustawienie szybkości widać dobrze po włączeniu testu (14).
19 - Włączenie i ustawienie ekstendera zakresu dla serwa. Używając tej opcji możemy zmusić większość serw do pracy w zakresie 180 stopni, przy zwykłym sterowaniu typu 1100-1900us. Ustawienie mnożnika widać dobrze po włączeniu testu (14).
4. Wyjścia binarne:
Istnieje możliwość zmiany trybu pracy wyjść Servo11 i Serwo12 (albo oba na raz albo żadne) na tryb binarny.
Co to oznacza: Ano możliwość podłączenia wprost jakiegoś oświetlenia, czy zrzutu bomb
20 - Zaznaczenie tego ptaka powoduje włączenie trybu binarnego na wyjściu 11 i 12 jednocześnie. Ta opcja musi współgrać z zaznaczeniem jednego lub kilku ptaków 21,22,23 dla wyjścia 11 i/lub 12. Jeśli nie zaznaczymy żadnego, to zostanie automatycznie wyłączona.
21 - Napięcie na danym wyjściu pojawia się gdy na wybranym opcją 24 kanale RC jest sygnał poniżej 1300us.
22 - Napięcie na danym wyjściu pojawia się gdy na wybranym opcją 24 kanale RC jest sygnał od 1320us do 1680us.
23 - Napięcie na danym wyjściu pojawia się gdy na wybranym opcją 24 kanale RC jest sygnał powyżej 1700us.
24 - Źródło danych (numer kanału RC) dla wybranego (punkt 10) wyjścia binarnego.
Sygnał o wartościach pomiędzy, czyli 1300..1319 i 1681..1700us nie zmienia napięcia na wyjściu, czyli jeśli było napięcie, to w tych przedziałach sygnału dalej jest. Jest to zabezpieczenie przez przypadkowymi zmianami z powodu szumów, drżenia sygnału ect (takzwana histereza).
Można załączyć jednocześnie jedną, dwie lub wszystkie 3 opcje (co nie ma sensu, bo zawsze będzie napięcie na wyjściu).
Tak więc załączenie opcji 21 i 23 spowoduje że jeśli przykładowo drążek czy potencjometr będzie na środku to napięcia na wyjściu nie będzie. Przechylenie w którąkolwiek stronę spowoduje załączenie wyjścia, a powrót na środek - ponowne wyłączenie.
5. Tester serw:
Po kliknięciu w przycisk (6) na głównym ekranie zostaje uruchomiony emulator sygnału S.BUS.
Pozwala on na sterowanie każdym z 16 kanałów S.BUS z osobna przy pomocy suwaków i zadawania dowolnych pozycji. Wysyłanie danych S.BUS zaczyna się po kliknięciu w przycisk "START". Tester potrafi wysterować dowolne urządzenia zgodne z S.BUS, czyli np ESC lub ordynarne serwa S.BUS. Wysyłanie danych potwierdza mruganie kontrolki TX.
Jeśli mamy kilka dekoderów na wspólnej magistrali, to na ten test będą reagować wszystkie, czyli tak jakby dostawały sygnał S.BUS z nadajnika RC.
6. Przejściówka S.BUS:
Wygląda tak:
Dodatkowa przejściówka S.BUS nie jest konieczna do zaprogramowania dekodera. Do tego wystarczy sam interfejs USB/TTL i kabelek który jest w zestawie z interfejsem podłączony do 6 pinowego złącza w dekoderze.
Kiedy może się nam przydać przejściówka:
1. Jeśli w modelu mamy zainstalowane kilka dekoderów i chcemy je konfigurować/testować bez wymontowywania ich z modelu.
2. Jeśli dekoder zamontowany jest w miejscu trudno dostępnym, a mamy łatwy dostęp do odbiornika RC czy autopilota który steruje dekoderem.
3. Chcemy użyć funkcji "Tester serw" z konfiguratora przy podłączonych kilku serwach - wtedy zasilanie z portu USB nie da rady zasilić serw, no i niezbędna będzie przejściówka i zasilanie z BEC'a. Choć ten przypadek można obejść podłączając dowolny BEC 5V do dowolnego wolnego wyjścia dekodera, i w ten sposób serwa zostaną zasilone z BEC'a a nie z USB.
Podłącza się ją tak:
 ...
...
No i po połączeniu (na stole) całość wygląda tak:
......
......
c.d.n.
 ......
......