Projekt składa się z trzech głównych części, które złożone w jedną całość stworzą model tricoptera o trzech symetrycznych ramionach. Ramię ogonowe ma być obrotowe tak aby obrót modelu wokół osi yaw był realizowany przez zmianę wektora ciągu ogonowego zespołu napędowego. Dla porządku wymienię trzy części naszego projektu:
1) rama wykonana w technologii CNC
2) dedykowane regulatory BLM
3) moduł sterujący lotem
Ad. 1)
Rama ma składać się z frezowanych bloczków z aluminium PA36. Masa bloczków ma być zoptymalizowana przez maksymalne odelżenie konstrukcji. Zaprojektowaliśmy 8 typów elementów CNC:
- wspornik nieruchomego ramienia o średnicy 8mm
- wspornik nieruchomego ramienia o średnicy 10mm
- blok łożyska 688Z lub 678ZZ dla obrotowego tylnego ramienia 8mm
- blok łożyska 6800 dla obrotowego tylnego ramienia 10mm
- wspornik silnika
- blokada obrotowego ramienia
- dźwignia obrotowa
- mocowanie serwa
Bloczki mają być przykręcone do dwóch części ramy nośnej wykonanej z czarnego G10 o grubości 1,2mm
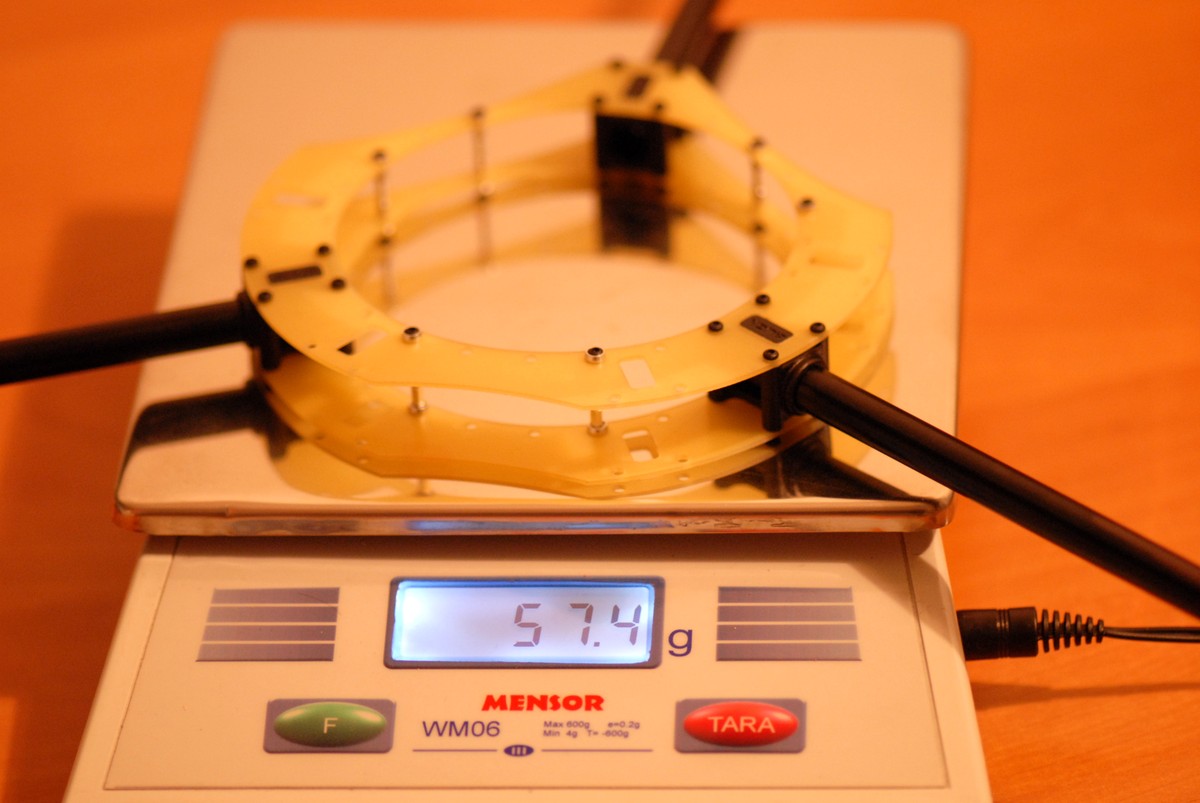
Prototyp ramy na wadze:
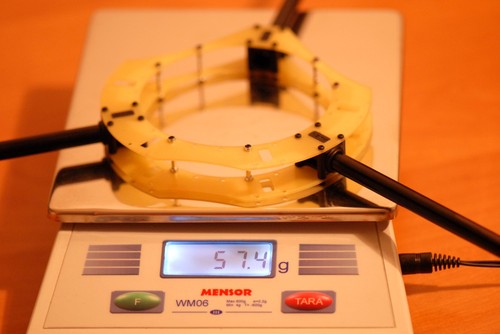
POWIĘKSZ...
Nie ma ściemy 57,4g!
W podanej masie ramy zawarte są dwa krążki do mocowanie silnika - w tricopterze na przednich ramionach jeden będzie służył jako mocowanie silnika, a drugi jako mocowanie podpór do lądowania. Tak to w tej chwili wygląda:
POWIĘKSZ...
Wersja docelowo kompletnej ramy nie powinna przekroczyć 150g.
Ad. 2)
Po ulotnieniu tricoptera zbudowanego o nasze żyroskopy dG 104-AL i mikseryPWM2 a także po bojach Tomka z modelem TT-Copter doszedłem do wniosku, że wykorzystanie w projekcie regulatorów dostępnych na rynku spowoduje niepotrzebne wydłużenie czasu zakończenie projektu. Dlatego też zdecydowaliśmy się zrobić własny regulator - tym bardziej, że od kilku miesięcy prowadzimy pracę nad serią regulatorów dedykowanych do modeli helikopterów RC.
Sercem regulatora jest procesor firmy FreeScale o oznaczeniu: MC9S08QE16CLC
Więcej o nim tutaj.
Poniżej rendery obwodu drukowanego.
Górna strona obwodu drukowanego:
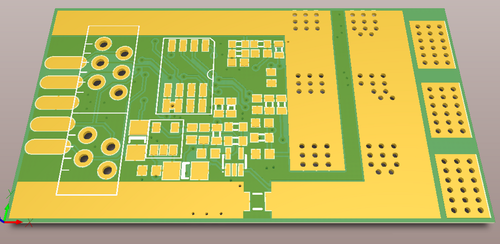
POWIĘKSZ...
Po lewej stronie pady od goldpinów, a dalej dwa nasze standardowe porty: portRC oraz sensorPORT. Przecięcie na dolnej ścieżce doprowadzające zasilanie do mostka to rezystor pomiaru prądu.
Dolna strona obwodu drukowanego:
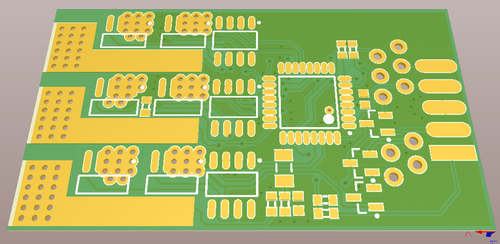
POWIĘKSZ...
Na dole mamy tranzystory sterujące fazami silnika oraz drivery do nich - nie ma tu mowy w rozwiązaniach najtańszych (czyli tranzystorach bipolarnych). Mam do przeładowania sporą pojemność bramki i chcemy osiągnąć wysoką sprawność, więc stratom na przełączaniu mówimy nie
I wymiary zewnętrzne płytki regulatora:
POWIĘKSZ...
Ad. 3)
Moduł sterujący który jest najważniejszym elementem całego modelu został zbudowany w oparciu o procesor firmy ST w architekturze Cortex M3. Mamy do tego zbudowane własne moduły uruchomieniowe, mamy opracowany własny ToolChain oparty o środowisko Eclipse i kompilatory GNU, mamy w końcu doświadczenie z systemem czasu rzeczywistego FreeRTOS. Dlatego też kontrolę lotu naszymi dronami powierzyliśmy sprawdzonemu procesorowi nad którym dość dobrze panujemy.
Symbol procesora użytego do modułu sterującego to: STM32F103RBT6
Więcej o nim tutaj
Prezentowany moduł jest jednym z bardziej zaawansowanych koncepcyjnie modułów sterowania lotem, ponieważ zawiera elementy które w innych konstrukcjach trzeba dokupić osobno - między innymi:
- żyroskopy w technologii Silicon MEMS
- akcelerometr trójosiowy również w technologii Silicon MEMS
- BEC impulsowy o wydajności 3A
- filtrowane wyjście zasilające do bezpośredniego podłączenia zestawu FPV
- czujnik prądu do dokładnego określania ilości energii wyciągniętej z pakietu podczas lotów FPV z systemem OSD
- osiem dedykowanych kanałów do podłączenie silników w standardzie I2C
- 10 linii I/O do podłączenie kanałów odbiornika lub sterowaniami innymi elementami modelu (np: serwa, regulatory w standardzie fastPWM, serwa pan i tilt kamery)
- dedykowane pady do dystrybucji zasilania do regulatorów obrotów
- złącze portów wyjściowych do dalszej rozbudowy
- złącze portRC do konfiguracji i programowania modelu
- złącze sensorPORT po podłączenia czujników
- przycisk do łatwego programowania modelu bez użycia komputera PC
- dwie diody RGB do sygnalizacji stanu modelu oraz trybu lotu
Moduł sterujący został zaprojektowany specjalnie do ramy modelu nad którą pracujemy równolegle.
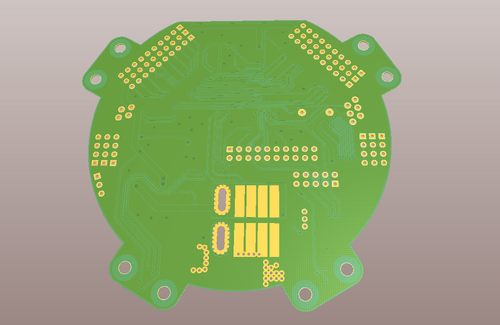
Górna strona obwodu drukowanego (widok do strony obrotowego ogona):
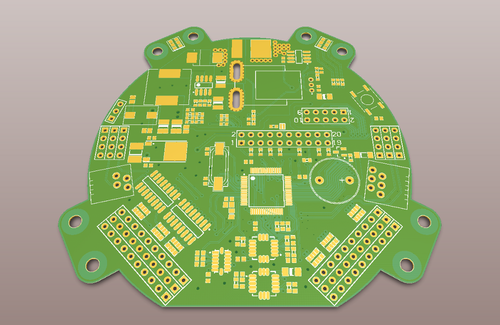
POWIĘKSZENIE
W centralnej części widać kwadratowy 32-bitowy procesor w architekturze ARM, za nim blisko ściętej krawędzi dwa żyroskopy a po ich lewej stronie trójosiowy akcelerometr.
Górna strona obwodu drukowanego (widok od przodu):
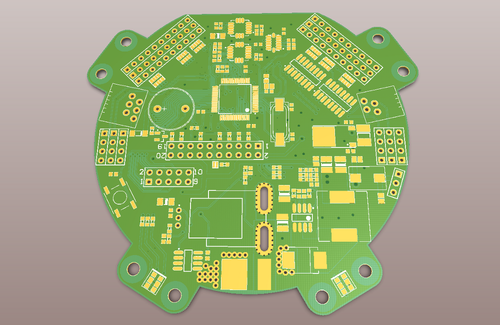
POWIĘKSZENIE
Na przednich "uszach" widać lewą i prawą diodę RGB. To specjalnie dla moich Córek które powiedziały, że patyczka musi mieć oczy
Dolna strona obwodu drukowanego (widok od strony ogona):
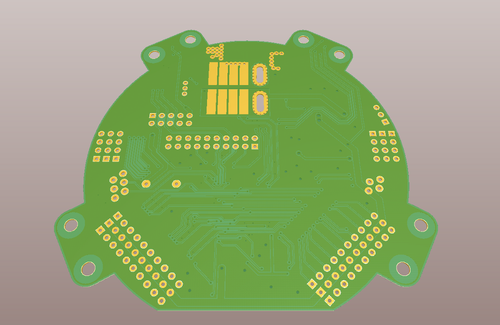
POWIĘKSZENIE
Płaska płytka umożliwiając ewentualne przyklejenie przy pomocy pianki dodatkowych modułów. Po lewej stronie goldpiny umożliwiające podłączenie 10 kanałów wejściowych z odbiornika. Po prawej 10 kanałów wyjściowych pracujących w standardzie fastPWM.
Dolna strona obwodu drukowanego (widok od przodu):
POWIĘKSZENIE
Na dole widać odkryte pola do przylutowania przewodów zasilających regulatory.
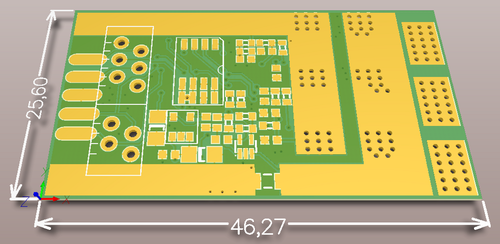
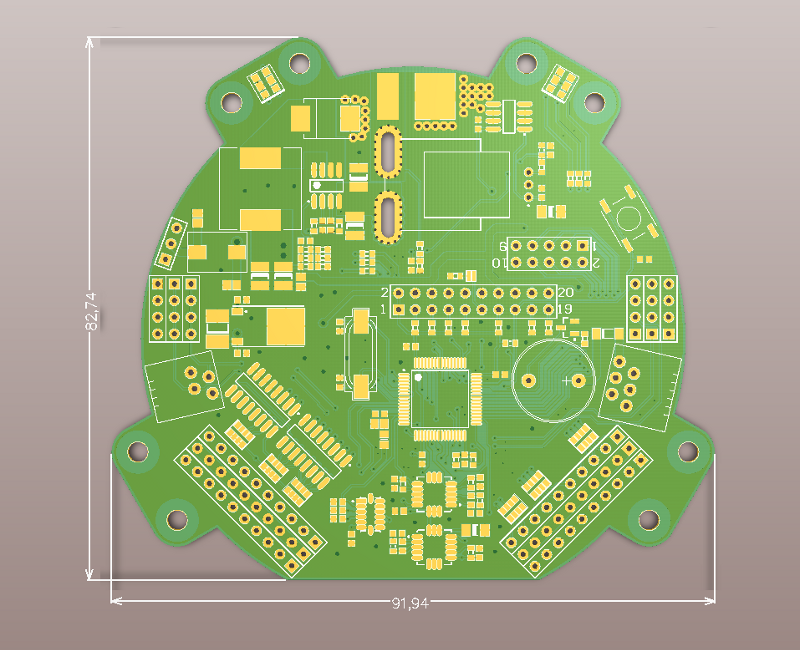
Wymiary modułu sterującego:
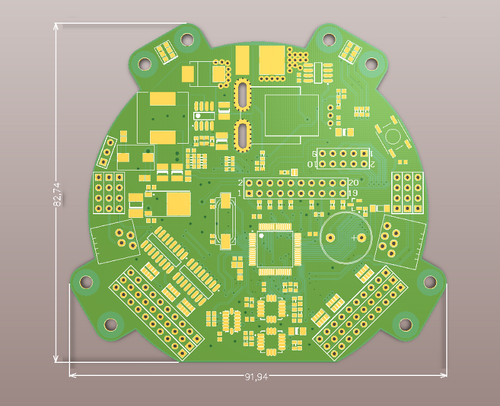
POWIĘKSZENIE
Kształt płytki dopasowany jest do zaprojektowanej przez nas ramy.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}