Zachowanie wielowirnikowców w powietrzu oraz stopień stabilizacji i odporności platformy zależy od wielu czynników. Wśród nich są:
- konstrukcja mechaniczna ramy
- typ użytych napędów (silników oraz śmigieł)
- wielkość platformy
- masa platformy gotowej do lotu
- algorytmy wyznaczające kąty orientacji przestrzennej
- opóźnienia w obiekcie regulacji
Ostatni parametr (opóźnienia w obiekcie regulacji) wprost zależy od zastosowanych regulatorów obrotów, które sterują napędami wielowirnikowca (multicoptera).
Platformy latające Hornet są budowane w oparciu o regulatory easyESCU. Regulatory te które zostały zaprojektowane przez zespół RCConcept Team specjalnie na potrzeby wielowirnikowców.
Co wyróżnia regulatory easyESCU i powoduje, że są unikalnym produktem:
1. szybki PWM sterujący wirtualnym komutatorem przełączającym fazy silnika z częstotliwością około 30kHz
2. zaawansowane algorytmy wykrywania kolizji napędu, zabezpieczające regulator przed uszkodzeniem w przypadku nagłego zatrzymania śmigła
3. duża prędkość oraz wydajność prądowa bloku sterującego końcówką mocy (mostkiem H) zrealizowana przy pomocy dedykowanych driverów, które są w stanie bramkę tranzystora MOS wysterować prądem do 1,5A
4. duża sprawność układu przełączającego która powoduje brak wydzielania ciepła w regulatorze, dzięki czemu cała moc idzie w uzwojenia silnika BLM a nie w eskalację efektu cieplarnianego
5. możliwość łatwej wymiany FW (firmware'u) przy pomocy programatora linkPROG podłączonego do złącza portRC w easyESCU
6. stabilizacja obrotów napędu na zadanej przez easyCSDU prędkości obrotowej
7. bardzo szybka odpowiedź układu napędowego na sygnał sterujący (2-5ms)
8. oddawanie prądu do pakietu napędowego przy hamowaniu napędem
9. symetryczne sterowanie układem napędowym zarówno przy hamowaniu śmigła jak i przy jego przyspieszeniu
10. możliwość pomiaru kluczowych parametrów regulatora easyESCU, takich jak: napięcie zasilające końcówkę mocy, prąd pobierany przez napęd, temperatura pracy mostka H (w przygotowaniu, będzie dostępne po uruchomieniu komunikacji po I2C)
11. zastosowanie dedykowanego procesora zaprojektowanego przez firmę FreeScale specjalnie do realizacji sterowników silników BLM, który jest wyposażony w odpowiedni zasób sprzętu hardware'owo wspomagającego proces sterowania silnika
12. specjalnie zaprojektowany układ zasilania driverów tak, aby można było dynamicznie hamować silnikiem, bez obawy przed wzrostem napięcia zasilającego
13. mostek H w układzie komplementarnym (do zasilania każdej fazy użyta jest para tranzystorów N-MOS + P-MOS)
14. obsługa standardu fastPWM (400Hz)
15. obsługa standardu I2C (400Hz) z adresacją MK lub naszą (od strony sprzętowej jest to gotowe, w przygotowaniu jest oprogramowanie)
16. możliwość zmiany sposobu sterowania regulatorem z fastPWM na I2C i odwrotnie w zależności od miejsca przylutowania przewodów oraz wgranego FW (FirmWare'u)
Dzięki nawiązaniu współpracy z pewnym Instytutem otrzymaliśmy wyniki pomiarów naszych regulatorów easyESCU oraz wyniki pomiarów regulatorów, które są obecnie uważane za najszybsze na rynku. Są stosowane w zaawansowanych i wymagających platformach do celów profesjonalnych.
W serwisie RCConcept DokuWiki umieściłem pełny opis oraz wszystkie wykresy:
http://wiki.rcconcept.pl/doku.php?id=pr ... egulatorow
Tutaj przedstawię tylko 4 wykresy które potwierdzają parametry naszego flagowego produkty - czyli regulatorów obrotów dedykowanych do wielowirnikowców Hornet i nie tylko, można je stosować również we własnych konstrukcjach.
Zacznę od dwóch wykresów na których widać rozpędzanie tego samego napędu z użyciem porównywanych regulatorów.
Regulator konkurencyjny:

POWIĘKSZENIE
Regulator RCConcept flying technology easyESCU12A:

POWIĘKSZENIE
Kilka słów komentarz. Warto zwrócić uwagę na:
1) szpilkę prądu dostarczaną do easyESCU w momencie nagłej zmiany sterującego sygnały wejściowego PWM z 50 do 70% wysterowania (pobudzenie skokiem jednostkowym). Jest to bardzo ostry pik, który dostarcza w danym momencie odpowiednią ilość prądu w uzwojenie silnika.
2) szybkość ustalenia się zadanej prędkości obrotowej śmigła po zmianie sygnały wejściowego. Co ważne czas odpowiedzi regulatora easyESCU nie zależy od częstotliwości sygnały PWM - dla osób bardziej wnikliwych na WiKi są te same wykresy przy różnych częstotliwościach.
A skończę na najważniejszym parametrze regulatora easyESCU czyli zdolności do bardzo szybkiego hamowania napędem oraz oddawania prądu do pakietu
Regulator konkurencyjny:

POWIĘKSZENIE
Regulator RCConcept flying technology easyESCU12A:
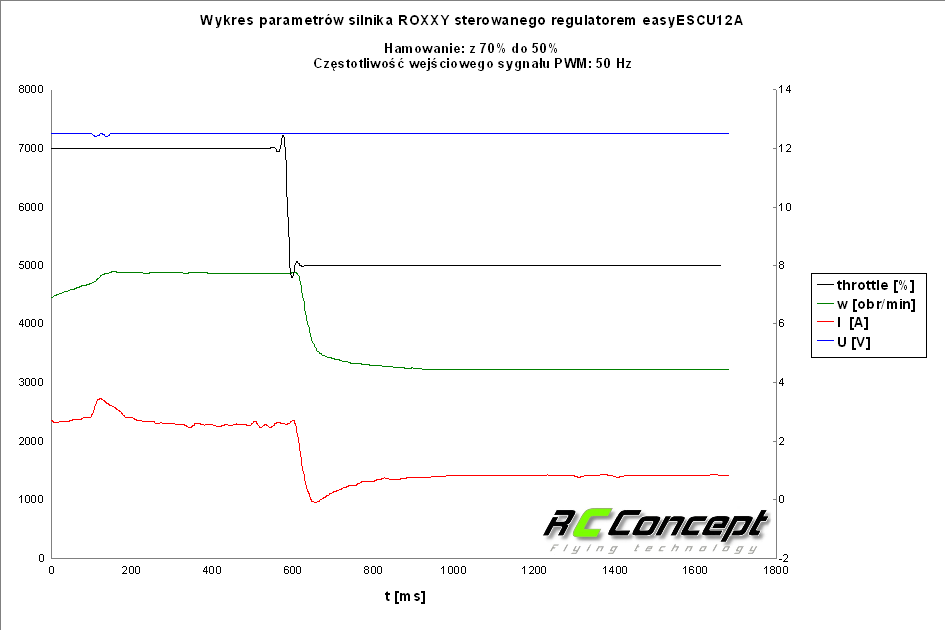
POWIĘKSZENIE
Porównanie dwóch ostatnich wykresów dobitnie pokazuje jakiej klasy regulator udało nam się zaprojektować. Jest to też odpowiedź dlaczego Hornet lata jak szerszeń (generuje charakterystyczny dźwięk) a jednocześnie jego zachowanie w powietrzu przy odpowiednich ustawieniach komputera pokładowego easyCSDU jest podobne do zachowania ważki
Regulatory obrotów występują w dwóch wersjach:
1. wersja gotowa do montażu w platformie
2. wersja "sote" do samodzielnego montażu (tańsza)
Wersji "sote" po przylutowaniu przewodów, kondensatorów oraz goldów we własnym zakresie będzie wyglądała tak jak na poniższych zdjęciach.
Widok z dołu na gotowy regulator easyESCU12A:

POWIĘKSZENIE
Widok z góry:

POWIĘKSZENIE
Regulatory mają fabrycznie:
- wlutowane gniazda GOLD 3,5mm, umożliwiające bezpośrednie wpięcie wtyków którymi zakończone są przewody silnika
- przylutowane przewody do podłączenia zasilania
- wlutowane kondensatory
- przylutowany przewód sygnału PWM
W opracowaniu jest jeszcze:
1. regulator easyESCU40A
Widok projektu płytki PCB czterech zespolonego regulatora 12A zoptymalizowane pod zasilanie 3S:

POWIĘKSZENIE

POWIĘKSZENIE
Opis projektu:
Regulator easyESCU4
2. regulator zespolony easyESCU4
Widok projektu płytki PCB regulatora 40A i 6S:

POWIĘKSZENIE

POWIĘKSZENIE
Opis projektu:
Regulator easyESCU40A



