APM 2.6
Moderatorzy: moderatorzy2014, moderatorzy
Re: APM 2.6
A jest jakieś ustawienie aby zmienić tylko pitch? Czy koniecznie oba. W ostateczności mogę to załatwić przy pomocy dual rate lub chyba end point tak? Problemem pozostaje jedynie domyślne uzbrajanie drona. Oba drążki max w dół i do środka. Po za tym proszę wytłumaczcie mi od czego zależy że dron obraca się (robi salto)? Bo nie wiem jak to jest czy od jakiegoś ustawienia kątów po nagłej zmianie kierunków czy to osobne ustawienie? Wiem że to dotyczy reacerow ale czy jak ustawię duże katy np. 45stopno to nie chciałbym mieć jakiś niespodzianek w stylu niespodziewany fikołek czy coś takiego :P
Re: APM 2.6
Ostatnio rozbiłem drona, po wystartowaniu i zmianie trybu na Loiter dron uciekł i wleciał w budynek :/
Pomoże ktoś rozszyfrować co się stało?
Zbyt wcześnie wystartowałem i dron nie złapał wystarczającej ilości satelit?
Pomoże ktoś rozszyfrować co się stało?
Kod: Zaznacz cały
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = FAIL - Truncated Log? Ends while armed at altitude 4.37m
Test: Compass = FAIL - Large change in mag_field (772.98%)
Max mag field length (2381.96) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = FAIL - Min satellites: 4, Max HDop: 5.16
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Motor Balance = UNKNOWN -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - 'FLOW_FXSCALER' not found
Test: Parameters = GOOD -
Test: PM = GOOD -
Test: Pitch/Roll = FAIL - Roll (-170.74, line 2521) > maximum lean angle (45.00)
Test: Thrust = FAIL - Avg climb rate 20.85 cm/s for throttle avg 762
Test: VCC = GOOD - Re: APM 2.6
Test: Compass = FAIL - Large change in mag_field (772.98%)
Max mag field length (2381.96) > recommended (550.00)
Kalibrowałeś kompas ?
Test: GPS = FAIL - Min satellites: 4, Max HDop: 5.16
no GPSa raczej nie złapałeś....
przeszedłeś wszystkie kroki w temacie na foruym dotyczącym przygotowania APMa do lotu ?
Max mag field length (2381.96) > recommended (550.00)
Kalibrowałeś kompas ?
Test: GPS = FAIL - Min satellites: 4, Max HDop: 5.16
no GPSa raczej nie złapałeś....
przeszedłeś wszystkie kroki w temacie na foruym dotyczącym przygotowania APMa do lotu ?
Re: APM 2.6
W jakim trybie wystartowałeś i było ok zanim przełączyłeś się na loiter - z ciekawości?
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: APM 2.6
wszystko było poprawnie skalibrowane, to nie pierwsze loty drona.
Wystartowałem w trybie AltHold, po zmianie na Loiter uciekł. Sprawdziłem w google earth zapisy GPS i faktycznie coś mu się pomieszało :P
Wystartowałem w trybie AltHold, po zmianie na Loiter uciekł. Sprawdziłem w google earth zapisy GPS i faktycznie coś mu się pomieszało :P
Re: APM 2.6
Właśnie, bo gdyby powodem był kompas to chyba w żadnym trybie by się nie utrzymał w powietrzu. Czy w logach masz coś na temat "GPS GLITCH"?
http://ardupilot.org/copter/docs/gps-fa ... ction.html
http://ardupilot.org/copter/docs/gps-fa ... ction.html
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: APM 2.6
nic, to co wyżej to pełny log. Czy coś mogło zakłócić prace kompasy lub gps?
Re: APM 2.6
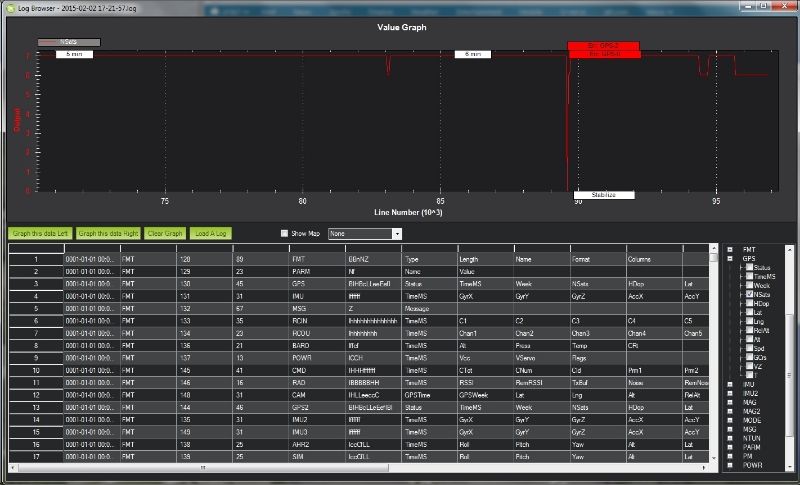
Nie no, to jest wynik auto-testu loga, a jak go wgrasz aby oglądać wykresy i z listy predefiniowanych filtrów wybierzesz coś związanego z GPS lub loiter lub errors, to powinieneś widzieć na czerwono co wyskakiwało, przykładowe zdjęcie z neta:

Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: APM 2.6
spayk, a nie przywróciłeś go do trybu AltHold w momencie jak zaczął uciekać? - sorki za pytanie, ale zrozumiałem, ze nie... - wiem czasami panika, czasami nie ma na to czasu bo jest BUM... itp...
Re: APM 2.6
dokładnie tak było, panika, ściana blisko i pyk ;P
Re: APM 2.6
Witam, czy w apm jest możliwość dodania "offsetu" albo mnożnika na throttle?
Chciałbym móc skompensować dociążenie quada tak, aby w trybie stabilize pozycja środkowa przepustnicy pozwalała na +/- zawis.
Obecnie pozycja środkowa umożliwia mu na delikatne aczkolwiek całkiem żwawe zapędy do kontaktu z matką ziemią.
Tryby poshold, loiter altHold działają znakomicie.
Generalnie główny mój problem jest związany z tym, że w aparaturze oba drążki mam wracające do pozycji neutralnych i chciałbym aby gdy nawali gps/kompas/baro i odpale tryb stabilize quad utrzymał się w powietrzu, bez dodatkowego dodawania przepustnicy. A przynajmniej by utrata wysokości była dużo wolniejsza dająca więcej czasu na opanowanie sytuacji.
edit. Dobrze rozumiem, że THR_MID załatwi sprawę? Odczytam throttle z logów w trakcie zawisu w ALTHOLD i ustawię to jako THR_MID?
Chciałbym móc skompensować dociążenie quada tak, aby w trybie stabilize pozycja środkowa przepustnicy pozwalała na +/- zawis.
Obecnie pozycja środkowa umożliwia mu na delikatne aczkolwiek całkiem żwawe zapędy do kontaktu z matką ziemią.
Tryby poshold, loiter altHold działają znakomicie.
Generalnie główny mój problem jest związany z tym, że w aparaturze oba drążki mam wracające do pozycji neutralnych i chciałbym aby gdy nawali gps/kompas/baro i odpale tryb stabilize quad utrzymał się w powietrzu, bez dodatkowego dodawania przepustnicy. A przynajmniej by utrata wysokości była dużo wolniejsza dająca więcej czasu na opanowanie sytuacji.
edit. Dobrze rozumiem, że THR_MID załatwi sprawę? Odczytam throttle z logów w trakcie zawisu w ALTHOLD i ustawię to jako THR_MID?

Re: APM 2.6
Mając Hexę miałem kilka niemiłych sytuacji i bez myślenia zawsze gaz na max. Później dopiero zastanawiałem się co zrobić aby sprowadzić drona na ziemię.
Jednym z takich sytuacji jaką miałem to rozerwanie dwóch łopat na jednym silniku, gaz do dechy i obroty wokół własnej osi (YAW), mimo że to hexa lądowanie jest dość trudne ale udało się wylądować nic nie uszkadzając:).
Jednym z takich sytuacji jaką miałem to rozerwanie dwóch łopat na jednym silniku, gaz do dechy i obroty wokół własnej osi (YAW), mimo że to hexa lądowanie jest dość trudne ale udało się wylądować nic nie uszkadzając:).
Re: APM 2.6
spayk, przejrzałem Twojego telemetry loga. Nagrywany był przez telemetrię, przez mission planner na komputerze, tak? Te wykresy co pokazywałem, to z logów nagranych samym pixhawkiem na kartę pamięci.
Generalnie - praktycznie cały czas masz zero satelit, czasem wskakuje na 3, może raz na 4. Cały czas HDOP jest na poziomie kilku - kilkunastu metrów, cały czas brak 3D fixa. To dlatego nie mogłeś wystartować w loiterze, wystartowałeś w alt-hold i było ok - mimo dużych offsetów kompasu, to jego nie winimy - jakby miał złe odczyty to kopter ani przez chwile nie byłby stabilny. W locie przełączyłeś na loiter - a przy takiej liczbie satelit do samobójstwo. Masz OSD czy tylko telemetrię?
Czy działo Ci się wcześniej coś z GPSem? czy telemetrię dołożyłeś niedawno czy od zawsze na niej latałeś?
Kupiłem telemetrię 433Mhz na banggood za jakieś $35 i sieje tak, że gimbal niepołączony żadnym kabelkiem, trzymany w ręce pół metra od telemetrii szaleje. GPS fixa też nie da się złapać. Po wyłączeniu telemetrii, w 30 sekund łapałem 13 satelit - może to to?
Generalnie - praktycznie cały czas masz zero satelit, czasem wskakuje na 3, może raz na 4. Cały czas HDOP jest na poziomie kilku - kilkunastu metrów, cały czas brak 3D fixa. To dlatego nie mogłeś wystartować w loiterze, wystartowałeś w alt-hold i było ok - mimo dużych offsetów kompasu, to jego nie winimy - jakby miał złe odczyty to kopter ani przez chwile nie byłby stabilny. W locie przełączyłeś na loiter - a przy takiej liczbie satelit do samobójstwo. Masz OSD czy tylko telemetrię?
Czy działo Ci się wcześniej coś z GPSem? czy telemetrię dołożyłeś niedawno czy od zawsze na niej latałeś?
Kupiłem telemetrię 433Mhz na banggood za jakieś $35 i sieje tak, że gimbal niepołączony żadnym kabelkiem, trzymany w ręce pół metra od telemetrii szaleje. GPS fixa też nie da się złapać. Po wyłączeniu telemetrii, w 30 sekund łapałem 13 satelit - może to to?
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: APM 2.6
chyba trafiłeś w sedno, to był pierwszy lot z modułem telemetrii, będę testował.
Poradziłeś sobie jakoś z tym problemem czy odłączyłeś telemetrie na stałe?
Poradziłeś sobie jakoś z tym problemem czy odłączyłeś telemetrie na stałe?
Re: APM 2.6
Najpierw myślałem, że sieje po zasilaniu, bo z podłączoną telemetrią nie działało mi OSD. Zasiliłem ją przez oddzielnego BECa, pomogło na OSD, minimalnie pomogło na GPS - bo wcześniej miałem zero satelit, po zmianie - tak jak Ty, 3-4 szt. Ale to nadal tragedia. Jeszcze jak zorientowałem się, że wystarczy, że telemetria jest w pobliżu niezależnego gimbala i jego IMU error lecą w tysiące, to odłożyłem w kąt.
Odłączyłem - może pomóc zmiana mocy nadawania, domyślnie jest 500mW, można zmienić na okolice 50-100mW i sprawdzić efekty. Ale zanim to zrobiłem, trafiłem na wyprzedaż rctimer i kupiłem ten zestaw - http://rctimer.com/product-834.html
Nie testowałem jeszcze. Ale bardzo zależy mi na telemetrii więc w końcu za to się wezmę.
Odłączyłem - może pomóc zmiana mocy nadawania, domyślnie jest 500mW, można zmienić na okolice 50-100mW i sprawdzić efekty. Ale zanim to zrobiłem, trafiłem na wyprzedaż rctimer i kupiłem ten zestaw - http://rctimer.com/product-834.html
Nie testowałem jeszcze. Ale bardzo zależy mi na telemetrii więc w końcu za to się wezmę.
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S