sorki chłopaki powoli wygrzebuje się z równoległymi wysyłkami innych gratów. Zaraz napiszę Tobie PW.
: środa 05 lut 2014, 20:02
autor: Adasko
Pieniazki juz masz na koncie
: środa 05 lut 2014, 22:37
autor: krzysztof21
Ty juz masz Krzysiu
Tak przy okazji innych zakupów dostałem razem
Rozpiskę podłączenia w zasadzie rozumiem - tylko dla kontroli czy dobrze rozumiem spytam - w miejsce +- BEC podłączamy +5V i z tego bierze zasilanie "Procesor" a z PWM1-silnik biorą zasilanie serwa lotek i sterów i B)?serwa gimbala? C)?odbiornik PPM?.
: środa 05 lut 2014, 22:43
autor: marbalon
W tej wersji 5V jest wspólne, czyli 5V idzie i na serwa i kostkę MAX7456 i na stabilizator 3v3 z którego zasilana jest reszta scalaków Proc/rfm22/spi flash/czujniki.
W następnej wersji będzie rozdzielone i to co na BEC pójdzie to będzie zasilać tylko serwa a to co z PWM1 będzie zasilać elektronikę - tak jak zalecał miś.
Tak więc tutaj w przypadku dużych serw to dajemy porządnego BEC a w przypadku małych setupów to można z regla wszystko + w miejsce BEC można wlutować jakiegoś dużego elektrolita. Ja w Skysurferku 1,4m mam wszystkie z regulatora zasilone i nie ma problemów.
: środa 05 lut 2014, 22:59
autor: krzysztof21
Dobrze ,że dopytałem bo wcześniej pisaliśmy o tym zasilaniu i jakoś mi się ta druga opcja utrwaliła - czyli reasumując w KFC32FTB.V1 "+5V" wszędzie na całej płytce to to samo - jak chcemy podłączyć zasilanie serw osobno to należy wypiąć plusy z wtyczki i pod osobny BEC . OK
: czwartek 06 lut 2014, 23:35
autor: marbalon
Dzisiaj poszły listy do: Adasko, HIRO, woyu, pirzol... i skończyły mi się RFM22 niebawem dojdą nowe sztuki to podeślę resztę.
: piątek 07 lut 2014, 00:04
autor: HIRO
marbalon pisze:Dzisiaj poszły listy do: Adasko, HIRO, woyu, pirzol
o cholerka a moje skrzydło jeszcze bez silnika
: niedziela 09 lut 2014, 21:45
autor: marbalon
Weekend minął mi pracowicie, z uwagi na to ze tydzień temu rozbiłem swojego SkySurferka 1.4 robiąc triki których jeszcze nie umiem Walnał prosto dziobem w ziemię.
Deseczka i dziób wyglądał tak:
Troche CA do deseczki, spray, UHU-POR i wyglada tak
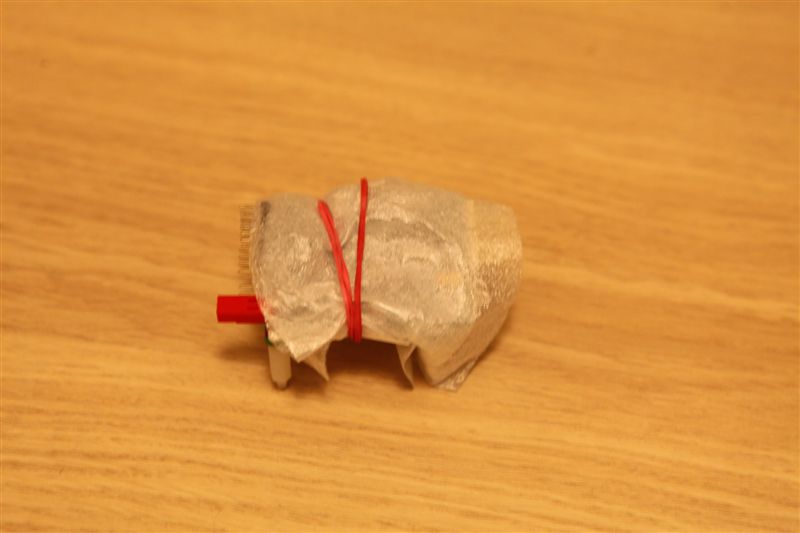
Z uwagi na to że miałem deficyt kamer to stwierdziłem że użyję takiej 5-gramowej z ebay. Obraz super nie będzie ale za to w 5min zrobiłem mocowanie z creazy plastiku i gotowe. Opory powietrza na pewno spadną (testy to potwierdziły).
Dzisiaj super pogoda więc w pole! Co prawda z testów RTH znów klapa ale co się nalatałem to moje. Wiało tradycyjnie u mnie "ciut" za mocno ale dałem dało radę wykręcić nowy PR - 6km Leciałem pod wiatr z przepustnicą tak na 60% 30km/h a wracałem bez silnika około 60-70km/h. Wcześniej robiłem testy szybowania z wiatrem aby zobaczyć jak daleko mogę od siebie odlecieć i w finalnym locie z pułapu 200m szybowałem z wiatrem 4,5km jak na ten modelik na moje super wynik. Tu na razie fotka a potem wrzucę film jak się zuploaduje. (nudny ale widać co i jak na ekranie)
: wtorek 11 lut 2014, 23:42
autor: marbalon
Uff dobre wieści... błąd RTH samolotu zasymulowany na biurku i wyleczony mam nadzieję skutecznie, ech kiedy ten weekend...
: czwartek 13 lut 2014, 18:47
autor: lukisek
Szybkie pyt - jak sie kalibruje imu ? - W locie ? Czy trzeba najpierw wytrymowac model i potem jakis
zapis ustawien ? Pytam a pytanie moze byc smieszne bo nie mialem jeszcze do czynienia z nowym konfig toolem
: czwartek 13 lut 2014, 19:36
autor: marbalon
Generalnie IMU kalibruje się 2 etapowo.
1. Etap to należy skonfigurować samolot w trybie passthrough czyli w trybie w którym IMU nie stabilizuje tylko robi za mixer, mówiąc wprost ustawić odpowiednią pozycję środkową dla wszystkich serw. Aby ułatwić sobie to w locie możemy przypisać dla serwa skrzydeł jako midpoint Aux1-6 (wpisując cyfrę 1-6) w konfiguracji serw, midpoint, i drugiego auxa ustawiamy dla steru wysokości. Wtedy podczas lotu za pomoca potencjometrów możemy sobie regulować kierunki pitch/roll. Po ladowaniu odczytujemy pozycję AUX i wpisujemy jako stałą wartość midpoint.
Druga opcja konfiguracji jest taka iż zamiast wartość mid ustawiamy sobie na stałę tak na oko i po wykonanym locie robimy korektę podobnie jak robiliśmy to w kopterach, czyli na postoju wyłączamy tryb Level, dajemy gaz na maxa i drążkiem pitch i roll korygujemy pozycję serw - będzie widac jak się wychylają, można to na such przećwiczyć w domku.
2. Etap to już z załączoną stabilizacją wyłaczamy tryb passthrough i załączamy ACC + Gyro. Wtedy widzimy czy ściąga go na którąś ze stron i po lądowaniu korygujemy działanie ACC identycznie jak pozycję lotek czyli gaz na MAX ale z włączonym trybem Level pitch i roll trzymając zwiększamy/inkrementujemy korektę w obu kierunkach.
Powoli zacząłem uzupełniać wiki i tam będę wszystko pisał tak więc, na razie nie ma co na wyrywki pytać.
Zaglądajcie w miarę często bo jak znajduję czas to staram się coś dopisywać.
: piątek 14 lut 2014, 18:46
autor: wiesiek_kr
Mam i ja :)
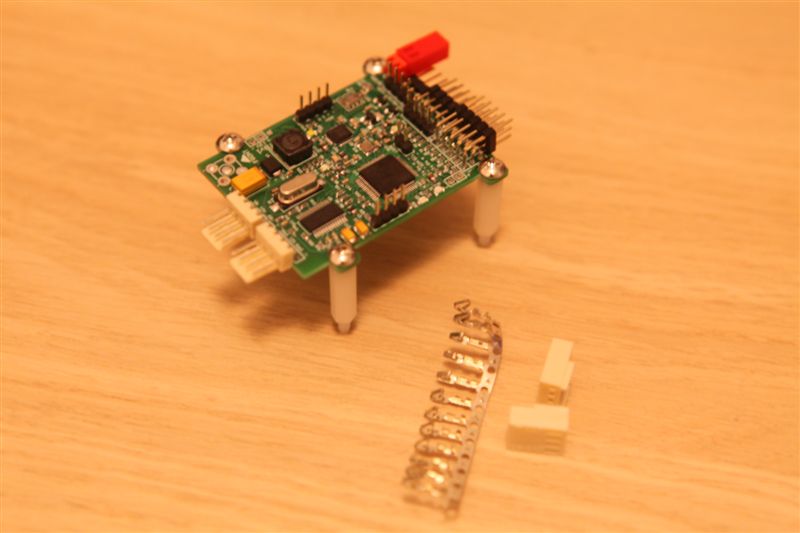
Przesyłka dostarczona nietknięta w bąbelkach
piękne zawiniątko
w komplecie wszystkie wtyczusie
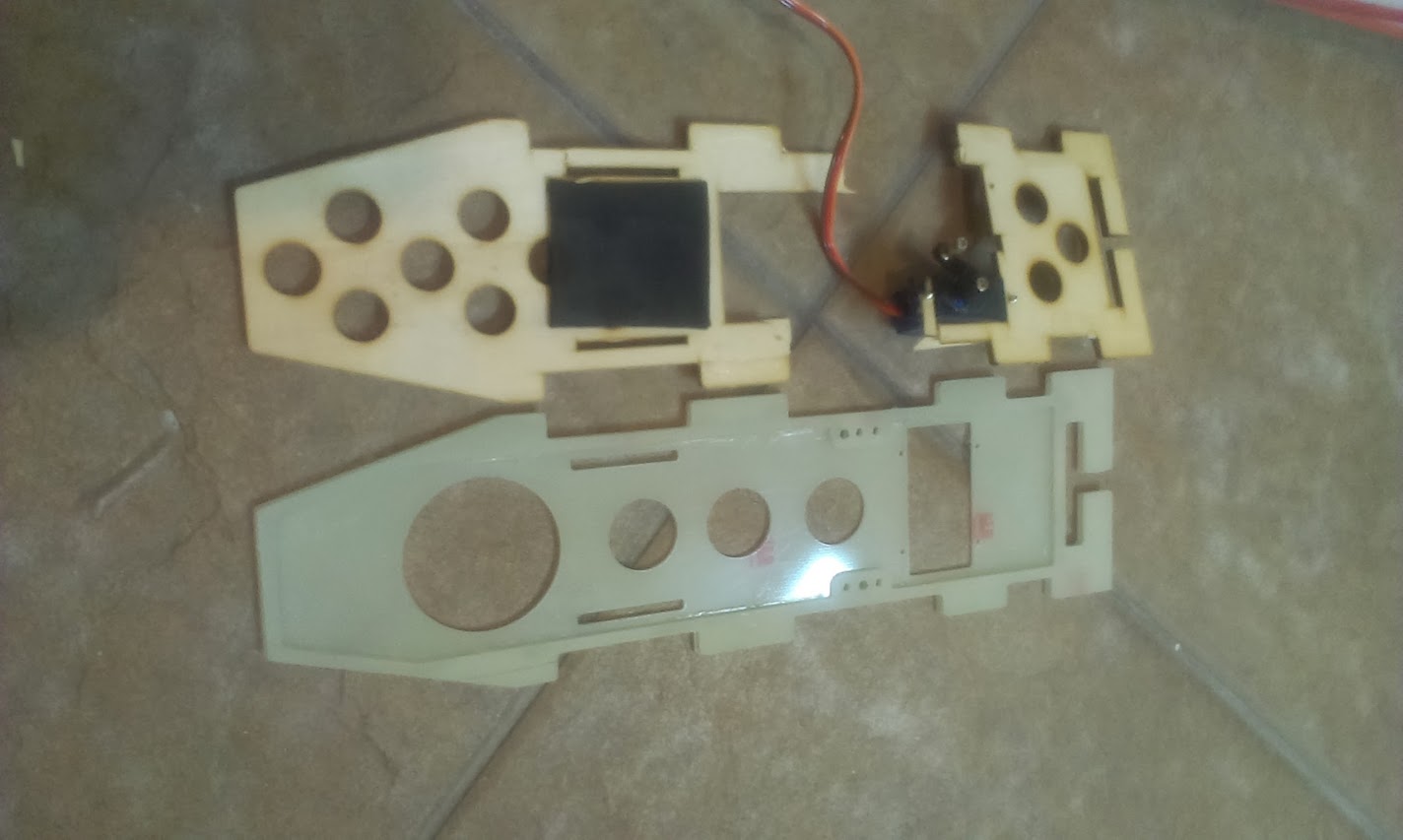
przymiarka do docelowego modelu 3,2m
jak na razie płytka będzie latała w 2,5 metrowym Ogarze.
Jako odbiornik posłuży LRS Thomass Scherrerz z sumą PPM, nadajnik AV FOX 250 - 800mW
O postępach będziemy pisać i dzielić się z innymi
Pozdrawiam
Wiesiek
: sobota 15 lut 2014, 12:24
autor: marbalon
Własnie wypuściłem wersję v55 i jest tam już działający tryb RTH i alt. hold itp! Kolega dzisiaj dzwonił z pola i wszystko działa jak należy. Tylko zapoznajdzie sie z obydwoma opisami wyżej, czyli wiki oraz opis PID Misia, aby dobrze ustawić PID od nawigacji. Mnie właśnie deszcz stuka w dach więc sobie nic dzisiaj nie potestuję :(
ps. Jak już trochę się pobawicie OSD to możecie dać znać co jest niezbędne aby dodać do OSD zarówno czego w menu brakuje jak i na ekranach. Na pewno pomiar baterii video, wydaje mi się że przydaje się pokazanie poziomu gazu np. Th:60% - szczególnie jak się załączy autogaz podczas RTH. no i piszcie co jeszcze używacie, z naciskiem na co jest fajnie a co jest niezbędne.
: niedziela 16 lut 2014, 01:22
autor: Adasko
Ja rowniez dziekuje za przesylke
Siedze nad nia od kilku godzin
wstyd sie przyznac
Jaki firmware jest w naszych plytkach ktora wersja numerowa
co robie zle
podlaczam ftdi do plytki do 4 pinow RS GUI
odpalam konfigurator 0.4 i nic sie nie laczy z FC
wersja druga odpalam konfigurator 0,6 i rowniez brak reakcji
zaznaczam ze ftdi ktory podlaczam to taki sam jakim sie lacze z eleresem ,
zmienialem rx z tx i zadnych oxnak zycia
na plytce swieci na stale dioda czerwona biala miga z czestotliwoscia raz na sekunde
zolta sie zapala na ulamek sekundy gdy porusze plytka
Ktos mnie naprowadzi co robie nie tak
od strony modulu nic sie nie swieci , nie miga
moze jest gdzies dokladnie opisane zachowanie diod w taki sposob jak w instrukcji eleresa czy phantoma
Niestety nie umiem znalezc
Edit . po nocnych walkach udalo mi sie dojsc do polaczenia komputera z FC
mam odczyty z czujnikow
ale nie mam odczytow z nadajnika
wpisalem moje sygnatury w cztery pola kliknalem na zapisz
ale po przelaczeniu na RC /silniki/ serwa nie mam nadal zadnych wskazan z nadajnika
troche juz si e zaczynam poddawac
nie wiem czy powinna sie swiecic jakas dioda sygnalizujaca zbindowanie
: niedziela 16 lut 2014, 09:53
autor: wiesiek_kr
Jeżeli płytkę dostałeś niedawno to prawdopodobnie masz V55 ale jeśli ponad tydzień temu to V54.
Ja używam GUI V0,6 ze strony link i wszystko pieknie pracuje
Zasilanie oczywiście masz popięte pod kanał pierwszy lub zewnęrznym Becem?