Dzisiaj rano zmieniłem w MP ustawienia DShot na 150 oraz 300 tak jak
pma_ mówił.
Po uzbrojeniu drążkami silniki osiągają prędkość minimalną i.... to tyle. Zero reakcji na dodanie gazu.
Wróciłem do DShot 600 i też zero reakcji na dodanie gazu, pomimo tego, że wartości AETR zmieniają się zarówno w Taranisie jak i MP...
BLHeliSuite nadal rozpędza silniki. Motor Test w MP też działa.
Potem dopiero wykonałem pomiary, które przedstawiłem w poprzednim poście, a teraz na koniec dnia wykonałem kolejne pomiary z tym, że zmieniłem PDB,
na takie, które ma
Kuczy w swoim Tarocie.

- old_pdb.PNG (120.38 KiB) Przejrzano 2650 razy
Podłączyłem owe PDB do akumulatora 12V z paneli słonecznych, żeby nie odlutowywać wszystkiego póki co.
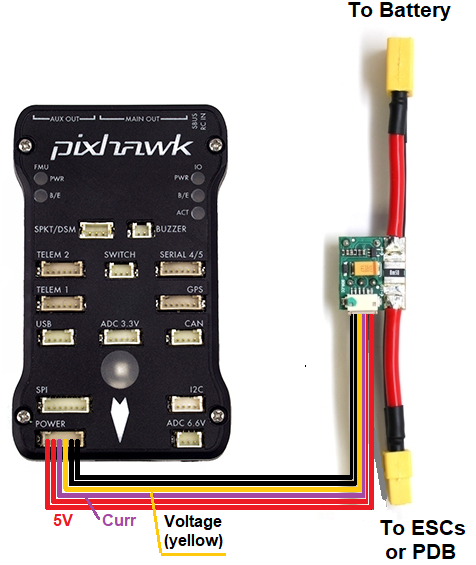
To PDB posiada gniazdo zasilające FC, więc sprawdziłem napięcia i wynoszą 5,14V bez podłączonego FC i 5,11V przy podłączonym.
Co prawda to nie 5,3V, ale i tak o 0,1V więcej niż z PM.
Minimalne napięcie FC przy uzbrajaniu silników, domyślnie jest ustawione na 4,3V.
boardvoltage wynosi teraz około 4835, niewiele więcej ale zawsze coś.
Pod linkiem producenta znalazłem tylko taki zapis:
Operating Voltage of Power Module: 5,1V
http://radiolink.com.cn/doce/product-detail-116.html
Były tam też rozpiski napięc na poszczególnych pinach w gniazdach FC. Są takie same jak te z dokumentacji ArduPilota, które wstawiłem w poprzednim poście.
Tak wiec niewiele zdziałałem dzisiaj. Jest tak jak było wczoraj, a nawet gorzej bo teraz silniki nie reagują w ogóle na dodanie gazu, a wszystko jest wykrywane... Dziwne.