Dopiero dwa dni temu mogliśmy iść polatać. Słabo się lata na pidach domyślnych (mamy masę mocno rozsuniętą przód-tył; kamerka wystaje przed ramiona), dlatego zdecydowaliśmy się jednak na Autotune. Początkowo nam nie zareagował na przełącznik Autotune, ale w końcu ruszył. Nasz czas latania to 14 minut i niestety Autotune się nie wykonał, no ale latalismy sobie na początku. Po locie cele pomierzone multimetrem i miały po 3,6V.
W domu zmieniłem ustawienia RC1_DZ do RC4_DZ na 50.
Dzisiaj poszliśmy polatać jeszcze raz. Start w AltHold i od razu Autotune. Kopter się bujał a my czasami ściągaliśmy go do siebie. Niestety u nas czas 14 minut nie wystarczył na Autotuning. Zrobił dwie osie, trzeciej nie zdążył i musieliśmy lądować. Zjechaliśmy akumulator pod obciążeniem do 3V/celę.
Będziemy musieli pobawić się parametrem AUTOTUNE_AXES i podzielić proces na kilka (dwa?) wyjścia.
EDIT: Dzisiaj było całkowicie bezwietrznie i nie musieliśmy go tyle korygować. Pierwsze dwie osie zrobione. Dzisiaj pewnie by zdążył wszystkie trzy, bo pierwsze dwie zrobił o dwie minuty krócej.
EDIT2:Wczoraj poszliśmy robić Autotune w osi Yaw. Kopter kręcił się cały czas lotu. Przeciągnęliśmy lot do końca prądu licząc, że może się zmieści w czasie, w ostatniej chwili ściągnęliśmy do siebie (odlatywał dzisiaj trochę z wiatrem) i wylądowaliśmy. Nie wiemy czy Autotune się wykonało poprawnie i całe, bo nie możemy znaleźć potwierdzenia tego w logach, ale o tym tutaj:
http://rc-fpv.pl/viewtopic.php?f=60&t=46223
Co prawda nowe wartości się pojawiły w PIDach w osi Yaw, ale czy skończył proces czy nie, to nie wiemy. Ściągnęliśmy go na koniec prądu i nie wiemy czy wykonał się do końca. W logach wygląda jakby step 4 zakończył się o 20:17, a majtało nim od początku do końca lotu.
Niestety używając Auto Analysis, znalazłem wpis:
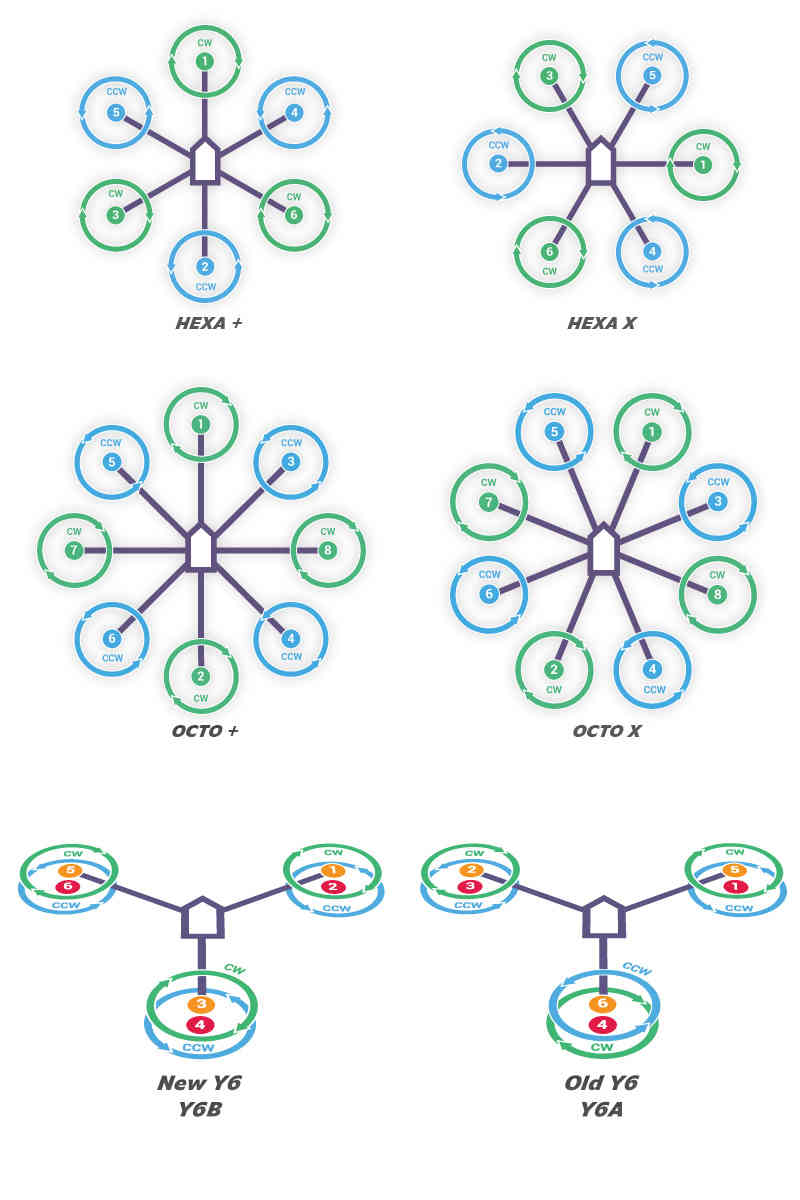
"Test: Motor Balance = WARN - Motor channel averages = [1675, 1584, 1652, 1616, 1648, 1621] Average motor output = 1632 Difference between min and max motor averages = 91", co mnie zmartwiło, bo zawsze mieliśmy GOOD.
Czy mogę prosić o pomoc w ustaleniu, który to silnik i jakie mogą być przyczyny?
Gdyby ktoś raczył popatrzeć w log:
Log do pobrania.
Czy to silnik 2 z HEXA X z poniższego rysunku?
https://discuss.ardupilot.org/uploads/d ... 5880c6.jpg (url, bo obrazek za duży)
EDIT3: Chyba doszedłem skąd jest komunikat:
"Test: Motor Balance = WARN - Motor channel averages = [1675, 1584, 1652, 1616, 1648, 1621] Average motor output = 1632 Difference between min and max motor averages = 91"
Ustawieni byliśmy zawsze w tym samym kierunku i po ucieczce z wiatrem zawsze wracaliśmy w lewo. Na wykresie widać, że C2 odstaje tylko w powrotach, nie w zawisie, ale wtedy ten silnik mniej pracuje.

- silniki1.jpg (299.58 KiB) Przejrzano 2259 razy
Martwi mnie natomiast to, że max wartości C (najlepiej widać na czerwonym C1 po rozciągnięciu wykresu) to 1867 a nie 1950. Z czego to może wynikać? Kalibracja aparatury zrobiona.

- silniki2.jpg (306.17 KiB) Przejrzano 2259 razy
{kind=link}