Mini H-Quad DRQ250 aka Flip32 klon Naze32
Moderatorzy: moderatorzy2014, moderatorzy

Nie mogę cały czas pozbyć się tego telepania ustawiłem już TPA na 0,65 i nadal telepie jak widać na filmie poniżej.
Może po prostu ta rama jest za miękka?
A tak nawiasem mówiąc to wczasie testowania tych Pidow to bym się pozbył nie tylko telepania ale i całego quada bo wpewnym momencie zerwało mi linka w odległości 160 metrów względu na krzaki , FS zadziałał ale miałem obroty ustawione na 1200 więc to było praktycznie swobodne opadanie.
Nic się nie stało bo wpadł w wysoką trawę ale szukałem go ponad 10 minut na szczęście była wizja ale muszę pomyśleć nad jakimś buzerem bo słabo słychać jak się próbuje go zlokalizować na buczenie silniczkow a śmigła się nie obracają przez wysoką trawę.
Może ktoś wie jaki buzer będzie pasował do filipa 32 ?
http://youtu.be/ZI-ZxV6n2QQ
Może po prostu ta rama jest za miękka?
A tak nawiasem mówiąc to wczasie testowania tych Pidow to bym się pozbył nie tylko telepania ale i całego quada bo wpewnym momencie zerwało mi linka w odległości 160 metrów względu na krzaki , FS zadziałał ale miałem obroty ustawione na 1200 więc to było praktycznie swobodne opadanie.
Nic się nie stało bo wpadł w wysoką trawę ale szukałem go ponad 10 minut na szczęście była wizja ale muszę pomyśleć nad jakimś buzerem bo słabo słychać jak się próbuje go zlokalizować na buczenie silniczkow a śmigła się nie obracają przez wysoką trawę.
Może ktoś wie jaki buzer będzie pasował do filipa 32 ?
http://youtu.be/ZI-ZxV6n2QQ
Ostatnio zmieniony środa 10 gru 2014, 12:34 przez Manix, łącznie zmieniany 3 razy.
Pozdrawiam Piotr
Skype: piotr0039
Skype: piotr0039
-
kamilborkowski
- Posty: 2183
- Rejestracja: niedziela 02 lut 2014, 14:43
- Lokalizacja: Opole
Nie wiem jak Flip32, ale Naze32 ma 2 piny wyprowadzone na buzzer, który sygnalizuje niski poziom baterii. Podpina się tam wtedy czysty buzzer bez żadnej dodatkowe elektroniki. W BaseFlight można wtedy nawet którąś pozycję przełącznika ustawić na ręczne włączanie tego buzzera - u mnie bardzo fajnie się sprawuje bo daje 2 w 1. Może Flip32 też taki posiada?
Edit: chyba nawet na płytce są oznaczone te piny jako "Beep"
Edit: chyba nawet na płytce są oznaczone te piny jako "Beep"
Wyprzedaję wszystko - http://rc-fpv.pl/viewtopic.php?t=46147
Buzzer zamontowany, działa super i będzie łatwiej znaleźć zgubę w jaki krzakach.
no chyba że wpadnie do wody no to wtedy już kamień w wodę
Niestety nie mogę cały czas pozbyć się tego telepania tak jak to widać na tym filmie w góry.
Zmieniałem już różne wartości niestety nie daje to pozytywnych efektów.
Może mi ktoś podpowie jaką wartość mam zmienić żeby pozbyć tego telepania na boki przy dodawaniu gazu. bo ogólnie quad lata bardzo dobrze więc nie chce niczego zmieniać chcę się pozbyć tylko tego trzęsienia na boki.
Z góry dziękuję za pomoc.
no chyba że wpadnie do wody no to wtedy już kamień w wodę
Niestety nie mogę cały czas pozbyć się tego telepania tak jak to widać na tym filmie w góry.
Zmieniałem już różne wartości niestety nie daje to pozytywnych efektów.
Może mi ktoś podpowie jaką wartość mam zmienić żeby pozbyć tego telepania na boki przy dodawaniu gazu. bo ogólnie quad lata bardzo dobrze więc nie chce niczego zmieniać chcę się pozbyć tylko tego trzęsienia na boki.
Z góry dziękuję za pomoc.
Ostatnio zmieniony niedziela 25 sty 2015, 15:21 przez Manix, łącznie zmieniany 1 raz.
Pozdrawiam Piotr
Skype: piotr0039
Skype: piotr0039

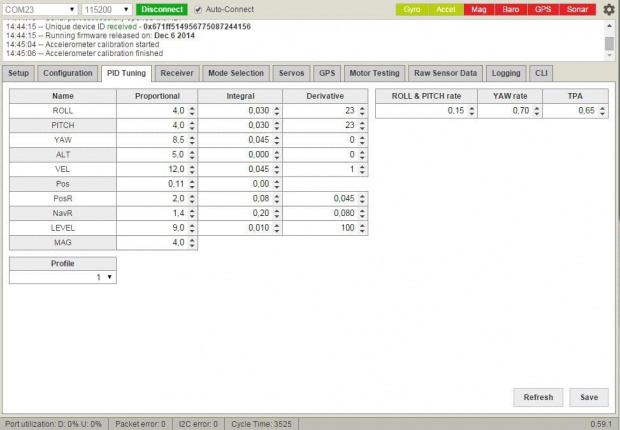
Wgraj cleanflight i zrób autotune. Zobacz jak u mnie się pidy zmieniły mad 250
Ja latam bez fpv, więc pewnie wartości mógłbyś mieć trochę inne, ale już widać, że masz źle ustawione.
Rate już mam zmienione, ale czekam na testy. Na razie pada śnieg i czasu mało.
Ja latam bez fpv, więc pewnie wartości mógłbyś mieć trochę inne, ale już widać, że masz źle ustawione.
Rate już mam zmienione, ale czekam na testy. Na razie pada śnieg i czasu mało.

A jak wezmiesz kopter i na srodku FC pod spodem ramy ustawisz go np na szyjce od butelki to co sie stanie ?
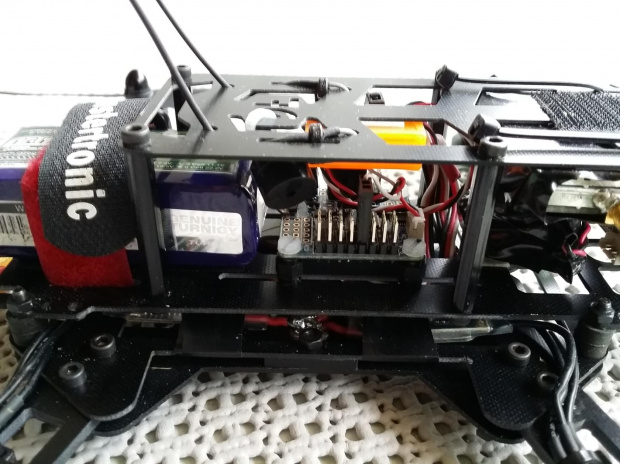
bo widzisz z tego co ja tu widze na tych zdjeciach to baterie masz gdzies z tylu i na moje to calosc nie jest wywazona. Flipy i nazy 32 lataja od strzala na defalutach lepiej lub gorzej.
Moja rada sprawdz wywazenie i jak bedzie dobrze to zajmij sie PID-ami . Opisalem w watku
http://rc-fpv.pl/viewtopic.php?t=24827& ... sc&start=0
jak to zrobic poprawnie.
Autotune w cleanflight nie zawsze dziala poprawnie w pewnych specyficznych warunkach.
Narazie bym sobie jesli moge doradzic odpuscil eksperymenty z innymi softami dopuki nie opanujesz tego co masz na tapecie.
bo widzisz z tego co ja tu widze na tych zdjeciach to baterie masz gdzies z tylu i na moje to calosc nie jest wywazona. Flipy i nazy 32 lataja od strzala na defalutach lepiej lub gorzej.
Moja rada sprawdz wywazenie i jak bedzie dobrze to zajmij sie PID-ami . Opisalem w watku
http://rc-fpv.pl/viewtopic.php?t=24827& ... sc&start=0
jak to zrobic poprawnie.
Autotune w cleanflight nie zawsze dziala poprawnie w pewnych specyficznych warunkach.
Narazie bym sobie jesli moge doradzic odpuscil eksperymenty z innymi softami dopuki nie opanujesz tego co masz na tapecie.
i tak skonczysz ... wrając do RC

No tak. Tego co tam miales z przodu nie bylo widac na poprzednich zdjeciach.Dlatego tez sugestia padla nt wywazenia i cofnietej baterii.
Silniki i smigla wywazone ?
W takim razie kombinuj z pidami.
Zapomnialem jeszcze dodac ze mozliwe ze w pewnym zakresie obrotow masz spore wibracje co moze oglupiac FC. Wez kopter w reke i daj mu sztrum - wyczujesz czy wibracje przybieraja na sile czy nie.
Odpusc troche D moze go za bardzo utwardziles.
Silniki i smigla wywazone ?
W takim razie kombinuj z pidami.
Zapomnialem jeszcze dodac ze mozliwe ze w pewnym zakresie obrotow masz spore wibracje co moze oglupiac FC. Wez kopter w reke i daj mu sztrum - wyczujesz czy wibracje przybieraja na sile czy nie.
Odpusc troche D moze go za bardzo utwardziles.
i tak skonczysz ... wrając do RC

Ja bym sprawdził wyważenie silników i śmigieł na początek żeby mieć lepsze wyniki, ale jako że do mnie też już idzie flip32+, to poczytałem trochę na temat autotune i imho zamiast samemu kombinować to zaraz po wyważeniu staję za Adrianem i odpalam autotune:)
Kolesie z rcg mieli jakieś naprawdę małe problemy z delikatnymi drganiami, albo tym, że im się nos unosił przy nawrotach.
Puścili autotune i zmiany pidów były tak małe że śmiem twierdzić że by to rok samemu próbowali wypidować, a po autotune latają idealnie.
Zobacz sobie autotune w youtube w sumie banalnie prosta sprawa.
Kolesie z rcg mieli jakieś naprawdę małe problemy z delikatnymi drganiami, albo tym, że im się nos unosił przy nawrotach.
Puścili autotune i zmiany pidów były tak małe że śmiem twierdzić że by to rok samemu próbowali wypidować, a po autotune latają idealnie.
Zobacz sobie autotune w youtube w sumie banalnie prosta sprawa.
Zmiana na cleanflight to chwila. Zawsze możesz sobie zrobić backup ustawień z baseflight. Przejść na cleanflight, zrobić autotune i wrócić na baseflight z nowymi pidami, albo już pozostań z nowym softem.
Później możesz te pidy jeszcze dostosować według własnych preferencji.
Nie masz jakieś udziwnionej konstrukcji, żeby nie zadziałały.
Ale rób tak, żebyś był zadowolony
Editt:
Nie twierdze, że samemu się nie zrobi lepiej, ale na pewno zajmie to znacznie więcej czasu, tym bardziej jak dopiero zaczynasz, niż automat i ewentualne poprawki.
Później możesz te pidy jeszcze dostosować według własnych preferencji.
Nie masz jakieś udziwnionej konstrukcji, żeby nie zadziałały.
Ale rób tak, żebyś był zadowolony
Editt:
Nie twierdze, że samemu się nie zrobi lepiej, ale na pewno zajmie to znacznie więcej czasu, tym bardziej jak dopiero zaczynasz, niż automat i ewentualne poprawki.
-
marcin.gala
- Posty: 2837
- Rejestracja: poniedziałek 15 mar 2010, 23:09
- Lokalizacja: ...
Dzisiaj będe walczył z autotune z cleanflight'a.
Podpowiem że budowałem mini i miałem podobny problem "naze32" wpadał z wibracje przy starcie i dodawaniu gazu.
TPA nie pomagało ,okazało się że po zbudowaniu innej wersji ramy z G10 ,bez damperów na sztywno i z silnikami DYS tego problemu nie ma.
Podejrzewam że możesz mieć łożysko walnięte w którymś z silników ,bądź ramiona wpadają ci w oscylacje ?
Podpowiem że budowałem mini i miałem podobny problem "naze32" wpadał z wibracje przy starcie i dodawaniu gazu.
TPA nie pomagało ,okazało się że po zbudowaniu innej wersji ramy z G10 ,bez damperów na sztywno i z silnikami DYS tego problemu nie ma.
Podejrzewam że możesz mieć łożysko walnięte w którymś z silników ,bądź ramiona wpadają ci w oscylacje ?
FPV nie kupisz.FPV robisz.
Licencja BNUC'S.
Nie ustawisz koptera lepiej niż swój własny poziom latania.
Licencja BNUC'S.
Nie ustawisz koptera lepiej niż swój własny poziom latania.

Manix, jak możesz to wklej "dump" z cli. Wtedy będzie można coś więcej podpowiedzieć.
Edit:marcin.gala, W cleanflight/baseflight ustawiony jest standardowo dość spory lpf który eliminuje błędne odczyty spowodowane brakiem łożysk czy wzbudzaniem się sensorów przez małą sztywność ramy.
Edit:marcin.gala, W cleanflight/baseflight ustawiony jest standardowo dość spory lpf który eliminuje błędne odczyty spowodowane brakiem łożysk czy wzbudzaniem się sensorów przez małą sztywność ramy.
Użytkowane: Bixler 2 1500m, SkySurfer 2000mm, Transporter Q7.6, Mini-Hrejser slim 280mm, Delta120min.
Składają się: SU31 ElectriFly, FarFlyer długolot fpv.
Zakurzone: T-rex 500ESP, Ofna ultra lx comp, Hpi Sprint 2
Składają się: SU31 ElectriFly, FarFlyer długolot fpv.
Zakurzone: T-rex 500ESP, Ofna ultra lx comp, Hpi Sprint 2
No wlasnie ta rama jest jakos oddzielona damperami od czesci ramion z silnikami. To dobre spostrzezenie i byc moze tu lezy problem.
Chociaz zaraz ktos moze napisac ze mu z ta rama lata wspaniale :)
Chociaz zaraz ktos moze napisac ze mu z ta rama lata wspaniale :)
Ostatnio zmieniony poniedziałek 26 sty 2015, 21:01 przez lukisek, łącznie zmieniany 1 raz.
i tak skonczysz ... wrając do RC
