remzibi OSD
: wtorek 01 lut 2011, 20:50
Na wstepie , przepraszam , ze tak pozno ale brak czasu nie pozwolil mi na wczesniejsze zamieszczenie opisu OSD . Krall , Diem - sorki , teraz jest zima wiec w tym watku postaram sie sukcesywnie zamieszczac w miare dokladny i dobrze zredagowany opis OSD .
Pragne serdecznie podziekowac wszystkim ktorzy swoja pomoca , swoim zaangazowaniem i testami w powietrzu oraz wszystkimi wskazowkami i podpowiedziami - pomogli wymyslic i ulepszyc to urzadzenie - przepraszam ze nie wymieniam wszystkich ale to duza grupa ludzi tu jak i za granica .
Sam jestem gownianym pilotem FPV i gdybym robil sam od poczatku OSD wg. swojego widzimisie to wyszlo by slabe OSD dla slabego pilota
- na szczescie od samego poczatku byla to realizacja zyczen i postulatow (w ramach mozliwosci technicznych) innych znakomitych pilotow FPV i dzieki temu wyszlo jak wyszlo - czyli chyba nie najgorzej - i to wlasnie dzieki tej pracy zespolowej , a wszystko dla wspolnej radosci i dobra wspolnego .
W zwiazku z zapytaniami odpowiadam , ze tak , mozna kupic u mnie gotowe urzadzenie OSD w komplecie z GPS i kablem USB oraz kablami polaczeniowymi . Mozna tez nabyc samo OSD lub sama plytke lub sam GPS lub sam kabel USB . Jest to pomoc w zmontowaniu wlasnego OSD dla chetnych .
Przypominam, że koncepcja urzadzenia , konkretny wzór schematu ideowego oraz mozaika ścieżek obwodu drukowanego podlega pod prawo autorskie polskie i unijne :
~ Ustawa z dn. 4 luty 1994r. o Prawie Autorskim i Prawach Pokrewnych ~
~ Dz. U. nr 24 poz. 83 z późniejszymi zmianami ~
W związku z powyższym publikowane tu materiały należy traktować edukacyjnie i informacyjnie. Nie mogą być one wykorzystywane do jakiejkolwiek działalności zarobkowej! Mówię tutaj o kopiowaniu i sprzedawaniu .
Projekt jest chroniony licencja TAPR a wiec jakiekolwiek kopiowanie hardwaru-softwaru w celach komercyjnych jest zabronione , jesli juz ktos chce tani hardware - sa dostepne plytki drukowane
Plik licencji TAPR do pobrania

Dane techniczne :- zasilanie OSD : 7-14V - zalecany pakiet 2S - 3S
- zakres pomiaru napiecia zasilajacego : 0V-15V
- zakres pomiaru napiecia silnika (pakiet glowny modelu) : 0V-26V
- pobor pradu okolo 145mA , z czujnikami moze byc 165mA i wiecej
- GPS : dowolny z protkolem NMEA - GPGGA,GPRMC z wyjsciem com TTL RX TX (w komplecie zalecany GPS 5Hz na chipsecie MTK , ma mozlwosci konfiguracji zapisane juz w programie firmware OSD)
- waga 16gram z dedykowanym odbiornikiem GPS
- mozliwosc dowolego wykozystania dodatkowych wejsc w zakresie obslugiwanym przez oprogramowanie
- obudowa : termokurczka(bez zaciskania) lub dowolna np. pudelko po tic-tac'ach
Funkcje- proste polaczenie z PC w celach konfiguracji
- nie zajmowanie zadnego kanalu RC z odbiornika
- automatyczne wykrycie i konfiguracja modulu GPS
- configurowana funkcja autosave home po znalezieniu zadeklarownej ilosci satelitow
- kofigurowane jednostki dla predkosci km lub mile i reszte metry stopy(feet)
- dowolnosc wyboru wyswietlanych jednostek (lub nie wyswietlanie)
- konfigurowane zerowanie wysokosci do poziomu lotniska
- definiowane ulozenie informacji na ekranie (jak tez ich wylaczanie wlaczanie)
- definiowane symbole graficzne
- calibracja wyswietlanych napiec lub innych informacji z wejsc analogowych
- wejscie popmiaru impulsow z indywidualnym skalowaniem (jako miernik czestotliwosci lub RPM meter)
Opcjonalne wersje fimware ktore mozna "wgrac" do OSD
- on/off - mozliwosc wlaczania i wylaczania informacji z OSD na ekranie za pomoca alarmu wejscia ADC5
- firmware wspierajacy wizualizacje sztucznego horyzontu w wersji dla wspolpracy z urzadzeniami zewnetrznymi np. Ardupilot i wspolpracujacy z innymi dowolnymi urzadzeniami (A1_6 , A1_71) , w tym versja miksujaca pitch i roll
- firmware NOGPS dziala jak OSD ale bez pokazywania informacji zwiazanych z GPS (bez GPSu)
- firmware do lodki zdalnie sterowanej
- firmware dla amatorskiego projekltu kosmicznego EXA
przycisk
- zapisanie pozycji home (krotkie wcisniecie - klick)
- zmiana video mode (PAL NTSC) (wcisniecie i przytrzymanie okolo 1sekundy)
- wprowadzenie w tryb konfiguracji i komunikacji z PC za pomoca kabelka USB (przycisk wcisniety podczas wlaczania zasilania OSD)
Wyswietlane informacje :
- latitude
- longitude
- speed (predkosc)
- altitude (wysokosc)
- kierunek na dom (lotnisko)
- azymut na samolot z bazy (kat miedzy polnoca-baza-samolotem)
- dystans do domu (lotniska)
- napiecie zasilania systemu video
- napiecie zasilania silnika modelu
- wejscie pomiaru impulsow w pelni sklaowane (jako frequency meter lub RPM meter)
- timer (czas lotu)
- vario (predkosc wznoszenia /opadania)
- ilosc satelitow
- UTC Czas
- UTC Dtata
- 6 niezaleznych wejsc ADC do dowolnego zastosowania i indywidualnej kalibracji
- alarmy na napiecia oraz wszystkie wartosci ADC jak tez na dystans i wysokosc
- 32 niezaleznych dwuznakowych obiektow graficznych do tworzenia wlasnych grafik i napisow
- po detekcji predkosci 0km/h przez wybrana ilosc x sekund - wyswietlenie maksymalnych wartosci dystansu, wysokosci , predkosci osiagnietych w czasie lotu (po save home - piec minut na spokojny start kiedy MAXIMUM sie nie wlacza)
- konfiguracja OSD za pomoca programu konfiguracyjnego na PC za pomoca dolaczonego kabelka USB (universal UART-USB converter)
Zrobione :
- wspolpraca z Ardupilotem (done - zrobione) za pomoca protokolu $A,,,,,,, po UART
- ewentualne proby lotu autonomicznego (done - zrobione z Ardupilotem)
- graficzna wizualizacja sztucznego horyzontu i pochylenia przod-tyl (done - zrobione)
Do zrobienia :
- inne pomysly (moze telemetria)
- wspolpraca ze stabilizatorem FY-21
- wspolpraca z MK kopterem lub innymi urzadzeniami
Program do konfiguracji OSD na PCcie mozna pobrac tutaj - http://www.happykillmore.com/software/r ... /setup.exe
Aby go odpalic nie trzeba miec urzadzenia - mozna go zainstalowac "na sucho" i zapoznac sie mozliwosciami i ustawieniami OSD .
Bardzo polecam to zrobic jeszcze przed podjeciem ewentualnej decyzji o posiadaniu urzadzenia .
Warto tez zajrzec na te stronke http://www.happykillmore.com/Software/f ... NG=English ktora bazowo informuje o OSD .
ZASADA DZIALANIA
OSD jako urzadzenie pobiera informacje z GPSu i na tej podstawie ustala gdzie jest baza wykonujac funkcje "save home" (zapisanie pozycji geograficznej startu) , potem bazujac na danych z poruszajacego sie GPSu na podstawie roznicy danych pozycji geograficznej oblicza dystans do bazy , kierunek do bazy (strzalka pokazuje kierunek na baze) , kurs wzgledem polnocy , azymut (czyli kat na model z bazy wzgledem polnocy) , predkosc , wysokosc , variometr (predkosc opadania/wznoszenia) , czas i date universalna (pobierana z GPS) , oraz inne informacje .
Wszytkie te "moduly" informacyjne moga byc wlaczene lub wylaczane niezaleznie , jak tez dodawana do nich wlasna grafika lub jej brak , oraz dowolnie przemieszczane po ekranie .
PLIKI potrzebne do pracy OSD czyli software
OSD sklada sie z trzech plikow :
1. firmware - plik .hex (katalog HEX files) jest to glowny program znajdujacy sie w procesorku ktory stanowi serce urzadzenia i powoduje jego prace , firmware od czasu do czasu pojawia sie nowy i wtedy mozna go wymienic w OSD na nowszy za pomoca zintegrowanego programu Megaload (zalecany) lub modulu wymiany firmwaru (moze powodowac klopoty na roznych komputerach - nie zalecany) . Jest to mozliwe bo w procesorze jest preinstalowalny bootloader umozliwiajacy update firmwaru za pomoca uniwersalnego kabelka USB->UART bez potrzeby posiadania specjalizowanego programatora ISP .
2. ustawienia OSD - plik .bin (katalog BIN files) jest to maly pliczek w ktorym zachowane sa wszytkie nasze ustawienia - czyli to co mamy na ekranie , alarmy , kalibracje i skalowanie wejsc ADC , pozycje grafik i fontow , tryby pracy i wszystkie indywidualnie nastawiane przez nas opcje . Po kazdej zmianie ustawien OSD musimy dany plik .BIN wgrac do malej pamieci podrecznej procesora w OSD za pomoca modulu komunikacji .
Ten plik jest zatem bardzo czesto wgrywany do OSD .
Plik .BIN mozemy tez odczytac z OSD , zapisac na dysku , poprawic i wgrac ponownie .
3. fonty - plik .mcm (katalog Font) , jest to plik fontow czyli czcionek i ewentualnych grafik uzywanych w generatorze znakow OSD . Plik ten mozemy dowolnie edytowac i zmieniac oraz dodawac wlasne grafiki czy fonty i wgrywac do OSD za pomoca modulu komunikacji , zaznaczajac opcje fonts .
Wszystkie potrzebne pliki i dostepne ostatnie firmwary sa do pobrania TUTAJ
Modul GPS
OSD jest w stanie pracowac z dowolnym GPSem pracujecym na komunikatach NMEA .
Bardzo dobrze sprawdza sie modul GPS na chipsecie MTK , wymiary 16x16mm czyli bardzo malo . Ten modul jest dodawany do zestawu , default baudrate 38400 .
W OSD modul pracuje 5Hz , czestotliwosc update ustawiamy dla modulu w programie konfiguracyjnym (wsparcie tylko dla MTK) .

Koszulka termokurczliwa jest bardzo wazna dla mechanicznej konstrukcji modulu GPS , bez niej bardzo latwo urywaja sie pady z kablami i modul staje sie bezuzyteczny - bez plastiku ochronnego kazda przypadkowa rysa na antenie pogarsza jej wlasciwosci odbiorcze (rozstrojenie) pogarszajac lub uniemozliwiajac prace - chroni tez troche przeciw wilgoci w powietrzu , ale nie czyni modulu wodoodpornego - takze z daleka nalezy trzymac sie od wody i wilgoci .
Plastik na module GPS jest bardzo wazny aby zapewnic i utrzymywac modul w dobrych warunkach mechanicznych - nigdy nie zdejmuj koszulki termokurczliwej z modulu GPS .
Kabel USB
OSD pracuje z dowolnym kablem UART w standarcie TTL , moze to byc zwykly COM rs232->UART z ukladem max232 , lub dowolny inny kabel USB->UART , do polaczenia potrzebne sa sygnaly TX , RX i GND .
Dodawany kabel moze byc na chipsecie OTi (juz nie stosowany bo pracuje z winXP i Vista) , Prolific , ArkMicro , MCCI , SiliconLabs lub popularny FTDI .
Jest to uniwersalna przejsciowka USB->UART ktora moze byc z powodzeniem stosowana do innych urzadzen podlaczanych do PC .
PODLACZENIE OSD
Podlaczenie calosci nie jest trudne , robimy to tak jak na zalaczonym schemacie .
Ponizej modelowy przyklad z oddzielnym zasilaniem systemu Video .

Zlaczem zasilajacym jest wejscie oznaczone POWER .
Wejscie ENG to wejscie pomiaru napiecia baterii glownej (silnika) i mozemy je zostawic nieuzywane .
Przycisk na OSD znajduje sie pod symbolem zoltego sloneczka - naciskajac sloneczko wyczujemy przycisk i poczujemy klik .
Mozna dolozyc dodatkowe polaczenie mas (GND) miedzy bateriami zasilajacymi , czesto pomaga ono w eliminacji zaklocen pracy odbiornika i polepsza zasieg RC - ale nie zawsze , trzeba to sprawdzic eksperymentalnie .
Po polaczeniu mas nie musimy troszczyc sie o polaczenie mas z np. czujnika pradu czy RSSI z odbiornika .
Nie musimy na poczatek podawac sygnalu z kamery - OSD sam wygeneruje obraz ze swoja czestotliwoscia HV . OSD na poczatku wyswietli LOGO i custom message uzytkownika po czym przeprowadza detekcje baudrate GPSu , gdy wykryje prawidlowo podlaczony GPS jest gotowe do pracy , jesli nie wykryje w ciagu okolo dwoch minut to przechodzi w tryb gotowosci odbioru informacji 38400 baudrate (tryb NO_GPS) , mozemy przesylac wlasne informacje z ta predkoscia jak $MxxyyLLEEtext lub w kazdej chwili podac dane NMEA GPSu
Modul GPS podlaczamy GND , 5V i RXosd-TXgps , TXosd-RXgps . Kabel od GPS pasuje do urzadzenia i kolorow kabelkow na naklejkach - wazne aby nie wpiac go odwrotnie .
WAZNE - po sparwdzeniu poprawnasci polaczen jako ostatnie wpinamy zasilanie .
Jesli w celu sprawdzenia , OSD podlaczamy do TV , komputera(video grabber) czy innego urzadzenia z wejsciem Video .
Powinnismy zobaczyc obraz osd - po chwili informacja ze gps zostal wykryty i wtedy mamy mozliwosc skorzystania z przycisku na urzadzeniu - dlugie wcisniecie (okolo 2 sekundy) zmienia mode ekranu 12x30(mode1-NTSC) lub 16x30(mode2-PAL) znakow .
Teraz wpinamy sygnal video in z kamery - pojawi sie obraz , jesli zniknie informacja OSD zmieniamy mode przyciskiem i save'ujemy tez przyciskiem "save home" (krotkie wcisniecie - klik) .
Przytrzymanie wylacznika dluzej niz sekunde spowoduje zmiane PAL-NTSC a krotki klik zapisanie naszej pozycji(startowej) do eepromu (save home) jak i zapisanie na stale video modu ekranu (po kazdym wlaczeniu urzadzenie startuje z zapamietanym video modem ekranu - oczywiscie w kazdej chwili mozemy go znowu zmieniac za pomoca przycisku jak i zapisac nowa pozycje i mod) .
Po zapamietaniu pozycji startowej resetuje sie timer na ekranie zliczajac czas od 0 do 59:59 i mozemy zaczac latac .
Pare slow wyjasnienia dotyczacych dokladnosci wskazan GPS i OSD :
1. Jesli model jest bez ruchu to strzalka ma prawo poruszac sie oraz odleglosc ma prawo "plywac" o pare metrow (2-4 metry) , wynika to z tego , ze kazdy odczyt pozycji przez GPS odbywa sie w jakby kole o promieniu paru metrow wobec rzeczywistej pozycji - im wiecej satelitow tym ten promien jest mniejszy i wyswietlanie pozycji dokladniejsze .
2. Wysokosc jest ustalana niejako "przy okazji" i nie jest implementowana do GPSow jako miarodajna - ale , ze jest podawana w wartosci orientacyjnej wiec wykozystujemy ja w OSD . Dokladnosc pokazywania wysokosci jest tym wieksza im wiecej satelitow GPS widzi - dlatego dobrze jest poczekac na 9-10 satelitow i dopiero wtedy wcisnac "save home" aby dokladnie wyzerowac wysokosc wzgledna do lotniska . Przy 9-10 satelitach dokladnosc wysokosci zaczyna byc porownywalna z wysokosciomierzem cisnieniowym , przy 5 satelitach jest baaaardzo orientacyjna .
Jesli zrobimy save home przy 5 satelitach czyli wartosci mocno orientacyjnej, po znalezieniu w czasie lotu lub ladowaniu z wskazaniem 10 satelitow, bedziemi mieli spory blad wzgledny wysokosci wynikajacy z dokladnosci pomiaru przez GPS , to jest oczywiascie normalne , ze wysokosc bedzie roznila sie +/- 40-50m od pozycji wyjsciowej przed startem - gdzie byla mala liczba satelitow .
3. Co do variometru - tu jest znacznie lepiej bo jako pierwsza pochodna po wysokosci jest dosc precyzyjnym urzadzeniem nawet przy malej ilosci satelitow - oczywiscie im wiecej satelitow tym lepiej - wtedy wszystkie wskazania nabieraja dokladnosci . Ludzie z tym Vario GPSowym potrafia latac w termice , zadziawiajace umiejetnosci pilotazu .
4. To samo jest z kursem - jesli model jest bez ruchu , kurs a co za tym idzie i strzalka na dom jest zmienny (patrz pkt 1. ), prawidlowe wskazania pojawiaja sie dopiero w ruchu postepowym modelu .
5. Przy silnym wietrze i locie np. trawersem lub pod wiatr strzalka moze byc odchylana poniewaz pozycja i kurs sa obliczane z rzeczywistego kursu modelu wzgledem ziemi a nie orientacja kadluba modelu do kierunklu lotu (brak magnetometru czy innego czujnika pozycji kadluba) , w sytuacji lotu pod wiatr z predkoscia mniejsza niz wiatr strzalka potrafi pokazac zatem kierunek przeciwny . Z drugiej strony takie zachowanie strzalki pozwala oszacowac warunki wiatru w czasie lotu - potrzeba oczywiscie do tego juz parogodzinnego nalotu FPV aby "oswoic sie" ze sprzetem , potem przy lotach trawersem niuanse strzalki sa wrecz pomocne w walce z wiatrem .
--------------------------------------------------------------------------
==========================================
Mozliwe problemy i sposob postepowania z nimi
GPS przez dlugi czas nie znajduje satelitow .
Zwykle przyczyna dlugiego czasu szukania satelitow jak malej ilosci znalezionych satelitow sa zaklocenia , najczesciej harmoniczne od innych urzadzen wchodzacych w pasmo GPS .
I tak :
- Czasem sa to kamery 5V( jak i niektore 12V) ktore zaklocaja przez swoja przetwornice DC/DC , zwykle dotyczy to tanszych chinskich modeli , ekranowanie kamery moze w tym wypadku pomoc .
- Czasem jest to zlej jakosc napiecie zasilajace , zaklocane np. ESC , stosowanie kondensatorow na torze zasilania wskazane .
- Czasem to nadajnik Video , jego moc jest w satnie calkowicie zaklocic prace GPSu , maksymalne odsuniecie modulu GPS oraz zmiana kanalu nadawania nadajnika Video zwykle rozwiazuje ten problem
- Czasem sa to metalowe czesci blisko modulu GPSu - potrafia przeslaniac i/lub tlumic odbierany sygnal z satelit (sprawdzamy czy GPS jest polozony antena do gory) .
- Czasem to inne przyczyny , np. pogoda , chmury , jonizacja powietrza , bliskosc nadajnika lub przekaznika GSM .
Aby ustalic i zlokalizowac przyczyne musimy na otwartym terenie podlaczyc jedynie OSDz GPSem i wpiac bezposrednio do jakiegos monitora (TV , easycap itp.) - po czym sprawdzic w jakim czasie sa znajdowane i lokalizowane satelity . Zazwyczaj odbywa sie to w ciagu 1 -3 minuty , przy zlej pogodzie (chmury) moze byc troche dluzej .
Po czym dodajemy poszczegolne komponenty zestawu pojedynczo aby zlokalizowac zrodlo zaklocen , a po dodaniu kazdego z elementow odpalamy zestaw , a wiec dodajemy
- kamera
- nadajnik video
- ESC
- odbiorniki RC
- serva
- itp. itd.
Duzo potwierdzonych w praktyce zaklocen dzialania GPSu na modelu ma swoje zrodlo w kamerze (w takim wypadku wymiana kamery) i nadajnikach Video (zmiana kanalu nadawania)
Jesli GPS ma problem ze znalezieniem satelitow jedynie z OSD+GPS+monitor to prosze skontaktowac sie ze mna .
Na koniec maly tip sprawdzony przez userow a opisany i sfotografowany przez mikuna
Pod GPSa podkladamy blaszke alumiowa nie uziemiona okolo 40x40mm .
Tam Gdzie GPS byl bardzo zaklocany z racji upakowania wszystkiego na malym obszarze , teraz lapie 7-8 satelit w czasie niecalej minuty .
Przed modyfikacja :

i po modyfikacji :

Na samolocie :
----------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
Teraz pare slow o mozliwych uszkodzeniach OSD oraz naprawach - ktore w wiekszosci kazdy moze zrobic w domu .
Ciezko w to uwierzyc ale wiekszosc problemow urzadzen wyslanych do naprawy wynika z przypadkowego przelaczenia PAL-NTSC lub odwrotnie - przez za dlugie przytrzymanie przycisku na OSD - czyz to nie zabawne ?
Strata czasu i pieniedzy na wysylki tylko dlatego , ze dlugo zostal przytrzymany wcisniety czerwony guziczek .
Ten problem postaralem sie wyeliminowac od firwaru 1.69 - system video jest przelaczany tylko po przytrzymaniu guziczka przez dwie sekundy .
--------------------------------
Nastepna w sumie nie czesta usterka sprzetowa ktora moze sie zdazyc to spalenie didy 1n4148 na wejsciu zasilajacym ( to taki maly czarny element przy czerwonym wejsciu zasilajacym) .
Jesli OSD nie dziala mierzymy napiecie wzgledem GND na wejsciu zasilajacym oraz poten ne punkcie oznaczonym 12V , tu napiecie ma byc okolo 0.8V mniejsze od zasilajacego , Jednoczesnie w punkcie 5V powinno byc 5V . Jeslio napiecie na 12V jest duzo mniejsze od zasilajacego - to wymieniamy diode na 1n4148 lub podobna , lub druga od spodu dla wersji plytki v1.2 - jest miejsce na diode w obudowie minimelf .
To , ze dioda na wejsciu czasem sie spali na skutej przypadkowego zwarcia jest jak najbardziej w porzadku , bo dziala ona jak bezpiecznik ktory ma sie przepalic . Przy okazji tez zabezpiecza przed odwrotnym podlaczeniam zasilania .

-------------------------------
Inna czestsza usterka to spalona dioda 1n4148 na wyjsciu zasilania GPSu , ta dioda tez broni OSD przed zwarciem oraz dziala jak bezpiecznik ktory ma sie przepalic w razie zwarcia . Jest to czarny element od dolu blisko wyjscia pinow na GPS . Ojaw to brak wyrywania GPSu .
Aby sprawdzic podpinamy GPS do OSD i mierzymy napiecie w punkcie 5V - ma byc 5V oraz na wyjsciu zasilajacym GPS - ma byc okolo 4.2V - jesli jest mniej lub wcale - wymieniamy diode . Mozna wstawic diode SMD w wiekszej obudowie np. 1206 lub minimelf .
Wymiana diod moze byc przeprowadzona we wlasnym zakresie przy minimalnej umiejetnosci lutowania , jak na zdjeciu .

--------------------------
Inny czesty problem to kiedy do wejscia ENG (wejscie pomiaru napiecia baterii glownej) zostaje podpieta wtyczka odwrotnie , zamieniony + i - , kiedy bateria zasilajaca Video (OSD) tez jest juz podlaczona oraz masy obu tez sa polaczone .
W tym wypadku zawsze pali sie dlawik na masie tego wejscia (ktory dziala jak bezpiecznik) lub dla plytki v1.2 jest to mala sciezka na plytce (tez bezpiecznik) , wiec przepalenie to normalny objaw blednego podlaczenia .
Naprawa- wyjmujemy spalony dlawik i drutujemy pady polaczenia cienkim pojedynczym drucikiem miedzianym odbudowujac bezpiecznik , taki drucim mozemy wyciagnac z jakiegos kabelka linki(wielozylowego) .
Te pady ktore musimy polaczyc pokazane sa na czerwono na obrazku .

----------------------------
Problemy kabla USB - to sie zdaza kiedy kabel przy czarnej wtyczce zostanie mocniej szarpniety lub pociagniety i zostaje urwany lub przerwany wewnatrz izolacji .
Aby naprawic musimy delikatnie wyjac zlote laczki z czarnego konektorka za pomoca szpilki podwazajacej zapadke i wypychajac cienkim srubokretem , nie ciagniemy za kabel .
Po czym do konektorka trzeba dolutowac kabelek a potem wlozyc konektorek do wtyczki - tym sposobem naprawimy mozliwosc komunikacji z OSD .
Nie cigniemy za kabel ale delikatnie wypychamy konektorek srobokretem .
-----------------------
Kiedy mamy problem z instalacja driverow kabla USB na win7 64bit - mozemy poprostu zastosowac maszyne virtualna a w niej miec zwykly winX . Maszyne virtualna zciagamy z MS . Oto link http://www.microsoft.com/windows/virtua ... fault.aspx
Jest to tez generalne rozwiazanie braku kompatybilnosci Vista czy win7 ze starszym softwarem pracujacym na winXP .
-----------------------
Na szczescie jak do tej pory nie bylo powaznych uszkodzen OSD , zapewne dlatego , ze bezpieczniki spelniaja swoja role do ktorej byly zaprojektowane .
http://www.rcgroups.com/forums/showpost ... count=2373
CDN ......
Pragne serdecznie podziekowac wszystkim ktorzy swoja pomoca , swoim zaangazowaniem i testami w powietrzu oraz wszystkimi wskazowkami i podpowiedziami - pomogli wymyslic i ulepszyc to urzadzenie - przepraszam ze nie wymieniam wszystkich ale to duza grupa ludzi tu jak i za granica .
Sam jestem gownianym pilotem FPV i gdybym robil sam od poczatku OSD wg. swojego widzimisie to wyszlo by slabe OSD dla slabego pilota
- na szczescie od samego poczatku byla to realizacja zyczen i postulatow (w ramach mozliwosci technicznych) innych znakomitych pilotow FPV i dzieki temu wyszlo jak wyszlo - czyli chyba nie najgorzej - i to wlasnie dzieki tej pracy zespolowej , a wszystko dla wspolnej radosci i dobra wspolnego .
W zwiazku z zapytaniami odpowiadam , ze tak , mozna kupic u mnie gotowe urzadzenie OSD w komplecie z GPS i kablem USB oraz kablami polaczeniowymi . Mozna tez nabyc samo OSD lub sama plytke lub sam GPS lub sam kabel USB . Jest to pomoc w zmontowaniu wlasnego OSD dla chetnych .
Przypominam, że koncepcja urzadzenia , konkretny wzór schematu ideowego oraz mozaika ścieżek obwodu drukowanego podlega pod prawo autorskie polskie i unijne :
~ Ustawa z dn. 4 luty 1994r. o Prawie Autorskim i Prawach Pokrewnych ~
~ Dz. U. nr 24 poz. 83 z późniejszymi zmianami ~
W związku z powyższym publikowane tu materiały należy traktować edukacyjnie i informacyjnie. Nie mogą być one wykorzystywane do jakiejkolwiek działalności zarobkowej! Mówię tutaj o kopiowaniu i sprzedawaniu .
Projekt jest chroniony licencja TAPR a wiec jakiekolwiek kopiowanie hardwaru-softwaru w celach komercyjnych jest zabronione , jesli juz ktos chce tani hardware - sa dostepne plytki drukowane
Plik licencji TAPR do pobrania
Dane techniczne :- zasilanie OSD : 7-14V - zalecany pakiet 2S - 3S
- zakres pomiaru napiecia zasilajacego : 0V-15V
- zakres pomiaru napiecia silnika (pakiet glowny modelu) : 0V-26V
- pobor pradu okolo 145mA , z czujnikami moze byc 165mA i wiecej
- GPS : dowolny z protkolem NMEA - GPGGA,GPRMC z wyjsciem com TTL RX TX (w komplecie zalecany GPS 5Hz na chipsecie MTK , ma mozlwosci konfiguracji zapisane juz w programie firmware OSD)
- waga 16gram z dedykowanym odbiornikiem GPS
- mozliwosc dowolego wykozystania dodatkowych wejsc w zakresie obslugiwanym przez oprogramowanie
- obudowa : termokurczka(bez zaciskania) lub dowolna np. pudelko po tic-tac'ach
Funkcje- proste polaczenie z PC w celach konfiguracji
- nie zajmowanie zadnego kanalu RC z odbiornika
- automatyczne wykrycie i konfiguracja modulu GPS
- configurowana funkcja autosave home po znalezieniu zadeklarownej ilosci satelitow
- kofigurowane jednostki dla predkosci km lub mile i reszte metry stopy(feet)
- dowolnosc wyboru wyswietlanych jednostek (lub nie wyswietlanie)
- konfigurowane zerowanie wysokosci do poziomu lotniska
- definiowane ulozenie informacji na ekranie (jak tez ich wylaczanie wlaczanie)
- definiowane symbole graficzne
- calibracja wyswietlanych napiec lub innych informacji z wejsc analogowych
- wejscie popmiaru impulsow z indywidualnym skalowaniem (jako miernik czestotliwosci lub RPM meter)
Opcjonalne wersje fimware ktore mozna "wgrac" do OSD
- on/off - mozliwosc wlaczania i wylaczania informacji z OSD na ekranie za pomoca alarmu wejscia ADC5
- firmware wspierajacy wizualizacje sztucznego horyzontu w wersji dla wspolpracy z urzadzeniami zewnetrznymi np. Ardupilot i wspolpracujacy z innymi dowolnymi urzadzeniami (A1_6 , A1_71) , w tym versja miksujaca pitch i roll
- firmware NOGPS dziala jak OSD ale bez pokazywania informacji zwiazanych z GPS (bez GPSu)
- firmware do lodki zdalnie sterowanej
- firmware dla amatorskiego projekltu kosmicznego EXA
przycisk
- zapisanie pozycji home (krotkie wcisniecie - klick)
- zmiana video mode (PAL NTSC) (wcisniecie i przytrzymanie okolo 1sekundy)
- wprowadzenie w tryb konfiguracji i komunikacji z PC za pomoca kabelka USB (przycisk wcisniety podczas wlaczania zasilania OSD)
Wyswietlane informacje :
- latitude
- longitude
- speed (predkosc)
- altitude (wysokosc)
- kierunek na dom (lotnisko)
- azymut na samolot z bazy (kat miedzy polnoca-baza-samolotem)
- dystans do domu (lotniska)
- napiecie zasilania systemu video
- napiecie zasilania silnika modelu
- wejscie pomiaru impulsow w pelni sklaowane (jako frequency meter lub RPM meter)
- timer (czas lotu)
- vario (predkosc wznoszenia /opadania)
- ilosc satelitow
- UTC Czas
- UTC Dtata
- 6 niezaleznych wejsc ADC do dowolnego zastosowania i indywidualnej kalibracji
- alarmy na napiecia oraz wszystkie wartosci ADC jak tez na dystans i wysokosc
- 32 niezaleznych dwuznakowych obiektow graficznych do tworzenia wlasnych grafik i napisow
- po detekcji predkosci 0km/h przez wybrana ilosc x sekund - wyswietlenie maksymalnych wartosci dystansu, wysokosci , predkosci osiagnietych w czasie lotu (po save home - piec minut na spokojny start kiedy MAXIMUM sie nie wlacza)
- konfiguracja OSD za pomoca programu konfiguracyjnego na PC za pomoca dolaczonego kabelka USB (universal UART-USB converter)
Zrobione :
- wspolpraca z Ardupilotem (done - zrobione) za pomoca protokolu $A,,,,,,, po UART
- ewentualne proby lotu autonomicznego (done - zrobione z Ardupilotem)
- graficzna wizualizacja sztucznego horyzontu i pochylenia przod-tyl (done - zrobione)
Do zrobienia :
- inne pomysly (moze telemetria)
- wspolpraca ze stabilizatorem FY-21
- wspolpraca z MK kopterem lub innymi urzadzeniami
Program do konfiguracji OSD na PCcie mozna pobrac tutaj - http://www.happykillmore.com/software/r ... /setup.exe
Aby go odpalic nie trzeba miec urzadzenia - mozna go zainstalowac "na sucho" i zapoznac sie mozliwosciami i ustawieniami OSD .
Bardzo polecam to zrobic jeszcze przed podjeciem ewentualnej decyzji o posiadaniu urzadzenia .
Warto tez zajrzec na te stronke http://www.happykillmore.com/Software/f ... NG=English ktora bazowo informuje o OSD .
ZASADA DZIALANIA
OSD jako urzadzenie pobiera informacje z GPSu i na tej podstawie ustala gdzie jest baza wykonujac funkcje "save home" (zapisanie pozycji geograficznej startu) , potem bazujac na danych z poruszajacego sie GPSu na podstawie roznicy danych pozycji geograficznej oblicza dystans do bazy , kierunek do bazy (strzalka pokazuje kierunek na baze) , kurs wzgledem polnocy , azymut (czyli kat na model z bazy wzgledem polnocy) , predkosc , wysokosc , variometr (predkosc opadania/wznoszenia) , czas i date universalna (pobierana z GPS) , oraz inne informacje .
Wszytkie te "moduly" informacyjne moga byc wlaczene lub wylaczane niezaleznie , jak tez dodawana do nich wlasna grafika lub jej brak , oraz dowolnie przemieszczane po ekranie .
PLIKI potrzebne do pracy OSD czyli software
OSD sklada sie z trzech plikow :
1. firmware - plik .hex (katalog HEX files) jest to glowny program znajdujacy sie w procesorku ktory stanowi serce urzadzenia i powoduje jego prace , firmware od czasu do czasu pojawia sie nowy i wtedy mozna go wymienic w OSD na nowszy za pomoca zintegrowanego programu Megaload (zalecany) lub modulu wymiany firmwaru (moze powodowac klopoty na roznych komputerach - nie zalecany) . Jest to mozliwe bo w procesorze jest preinstalowalny bootloader umozliwiajacy update firmwaru za pomoca uniwersalnego kabelka USB->UART bez potrzeby posiadania specjalizowanego programatora ISP .
2. ustawienia OSD - plik .bin (katalog BIN files) jest to maly pliczek w ktorym zachowane sa wszytkie nasze ustawienia - czyli to co mamy na ekranie , alarmy , kalibracje i skalowanie wejsc ADC , pozycje grafik i fontow , tryby pracy i wszystkie indywidualnie nastawiane przez nas opcje . Po kazdej zmianie ustawien OSD musimy dany plik .BIN wgrac do malej pamieci podrecznej procesora w OSD za pomoca modulu komunikacji .
Ten plik jest zatem bardzo czesto wgrywany do OSD .
Plik .BIN mozemy tez odczytac z OSD , zapisac na dysku , poprawic i wgrac ponownie .
3. fonty - plik .mcm (katalog Font) , jest to plik fontow czyli czcionek i ewentualnych grafik uzywanych w generatorze znakow OSD . Plik ten mozemy dowolnie edytowac i zmieniac oraz dodawac wlasne grafiki czy fonty i wgrywac do OSD za pomoca modulu komunikacji , zaznaczajac opcje fonts .
Wszystkie potrzebne pliki i dostepne ostatnie firmwary sa do pobrania TUTAJ
Modul GPS
OSD jest w stanie pracowac z dowolnym GPSem pracujecym na komunikatach NMEA .
Bardzo dobrze sprawdza sie modul GPS na chipsecie MTK , wymiary 16x16mm czyli bardzo malo . Ten modul jest dodawany do zestawu , default baudrate 38400 .
W OSD modul pracuje 5Hz , czestotliwosc update ustawiamy dla modulu w programie konfiguracyjnym (wsparcie tylko dla MTK) .
Koszulka termokurczliwa jest bardzo wazna dla mechanicznej konstrukcji modulu GPS , bez niej bardzo latwo urywaja sie pady z kablami i modul staje sie bezuzyteczny - bez plastiku ochronnego kazda przypadkowa rysa na antenie pogarsza jej wlasciwosci odbiorcze (rozstrojenie) pogarszajac lub uniemozliwiajac prace - chroni tez troche przeciw wilgoci w powietrzu , ale nie czyni modulu wodoodpornego - takze z daleka nalezy trzymac sie od wody i wilgoci .
Plastik na module GPS jest bardzo wazny aby zapewnic i utrzymywac modul w dobrych warunkach mechanicznych - nigdy nie zdejmuj koszulki termokurczliwej z modulu GPS .
Kabel USB
OSD pracuje z dowolnym kablem UART w standarcie TTL , moze to byc zwykly COM rs232->UART z ukladem max232 , lub dowolny inny kabel USB->UART , do polaczenia potrzebne sa sygnaly TX , RX i GND .
Dodawany kabel moze byc na chipsecie OTi (juz nie stosowany bo pracuje z winXP i Vista) , Prolific , ArkMicro , MCCI , SiliconLabs lub popularny FTDI .
Jest to uniwersalna przejsciowka USB->UART ktora moze byc z powodzeniem stosowana do innych urzadzen podlaczanych do PC .
PODLACZENIE OSD
Podlaczenie calosci nie jest trudne , robimy to tak jak na zalaczonym schemacie .
Ponizej modelowy przyklad z oddzielnym zasilaniem systemu Video .
Zlaczem zasilajacym jest wejscie oznaczone POWER .
Wejscie ENG to wejscie pomiaru napiecia baterii glownej (silnika) i mozemy je zostawic nieuzywane .
Przycisk na OSD znajduje sie pod symbolem zoltego sloneczka - naciskajac sloneczko wyczujemy przycisk i poczujemy klik .
Mozna dolozyc dodatkowe polaczenie mas (GND) miedzy bateriami zasilajacymi , czesto pomaga ono w eliminacji zaklocen pracy odbiornika i polepsza zasieg RC - ale nie zawsze , trzeba to sprawdzic eksperymentalnie .
Po polaczeniu mas nie musimy troszczyc sie o polaczenie mas z np. czujnika pradu czy RSSI z odbiornika .
Nie musimy na poczatek podawac sygnalu z kamery - OSD sam wygeneruje obraz ze swoja czestotliwoscia HV . OSD na poczatku wyswietli LOGO i custom message uzytkownika po czym przeprowadza detekcje baudrate GPSu , gdy wykryje prawidlowo podlaczony GPS jest gotowe do pracy , jesli nie wykryje w ciagu okolo dwoch minut to przechodzi w tryb gotowosci odbioru informacji 38400 baudrate (tryb NO_GPS) , mozemy przesylac wlasne informacje z ta predkoscia jak $MxxyyLLEEtext lub w kazdej chwili podac dane NMEA GPSu
Modul GPS podlaczamy GND , 5V i RXosd-TXgps , TXosd-RXgps . Kabel od GPS pasuje do urzadzenia i kolorow kabelkow na naklejkach - wazne aby nie wpiac go odwrotnie .
WAZNE - po sparwdzeniu poprawnasci polaczen jako ostatnie wpinamy zasilanie .
Jesli w celu sprawdzenia , OSD podlaczamy do TV , komputera(video grabber) czy innego urzadzenia z wejsciem Video .
Powinnismy zobaczyc obraz osd - po chwili informacja ze gps zostal wykryty i wtedy mamy mozliwosc skorzystania z przycisku na urzadzeniu - dlugie wcisniecie (okolo 2 sekundy) zmienia mode ekranu 12x30(mode1-NTSC) lub 16x30(mode2-PAL) znakow .
Teraz wpinamy sygnal video in z kamery - pojawi sie obraz , jesli zniknie informacja OSD zmieniamy mode przyciskiem i save'ujemy tez przyciskiem "save home" (krotkie wcisniecie - klik) .
Przytrzymanie wylacznika dluzej niz sekunde spowoduje zmiane PAL-NTSC a krotki klik zapisanie naszej pozycji(startowej) do eepromu (save home) jak i zapisanie na stale video modu ekranu (po kazdym wlaczeniu urzadzenie startuje z zapamietanym video modem ekranu - oczywiscie w kazdej chwili mozemy go znowu zmieniac za pomoca przycisku jak i zapisac nowa pozycje i mod) .
Po zapamietaniu pozycji startowej resetuje sie timer na ekranie zliczajac czas od 0 do 59:59 i mozemy zaczac latac .
Pare slow wyjasnienia dotyczacych dokladnosci wskazan GPS i OSD :
1. Jesli model jest bez ruchu to strzalka ma prawo poruszac sie oraz odleglosc ma prawo "plywac" o pare metrow (2-4 metry) , wynika to z tego , ze kazdy odczyt pozycji przez GPS odbywa sie w jakby kole o promieniu paru metrow wobec rzeczywistej pozycji - im wiecej satelitow tym ten promien jest mniejszy i wyswietlanie pozycji dokladniejsze .
2. Wysokosc jest ustalana niejako "przy okazji" i nie jest implementowana do GPSow jako miarodajna - ale , ze jest podawana w wartosci orientacyjnej wiec wykozystujemy ja w OSD . Dokladnosc pokazywania wysokosci jest tym wieksza im wiecej satelitow GPS widzi - dlatego dobrze jest poczekac na 9-10 satelitow i dopiero wtedy wcisnac "save home" aby dokladnie wyzerowac wysokosc wzgledna do lotniska . Przy 9-10 satelitach dokladnosc wysokosci zaczyna byc porownywalna z wysokosciomierzem cisnieniowym , przy 5 satelitach jest baaaardzo orientacyjna .
Jesli zrobimy save home przy 5 satelitach czyli wartosci mocno orientacyjnej, po znalezieniu w czasie lotu lub ladowaniu z wskazaniem 10 satelitow, bedziemi mieli spory blad wzgledny wysokosci wynikajacy z dokladnosci pomiaru przez GPS , to jest oczywiascie normalne , ze wysokosc bedzie roznila sie +/- 40-50m od pozycji wyjsciowej przed startem - gdzie byla mala liczba satelitow .
3. Co do variometru - tu jest znacznie lepiej bo jako pierwsza pochodna po wysokosci jest dosc precyzyjnym urzadzeniem nawet przy malej ilosci satelitow - oczywiscie im wiecej satelitow tym lepiej - wtedy wszystkie wskazania nabieraja dokladnosci . Ludzie z tym Vario GPSowym potrafia latac w termice , zadziawiajace umiejetnosci pilotazu .
4. To samo jest z kursem - jesli model jest bez ruchu , kurs a co za tym idzie i strzalka na dom jest zmienny (patrz pkt 1. ), prawidlowe wskazania pojawiaja sie dopiero w ruchu postepowym modelu .
5. Przy silnym wietrze i locie np. trawersem lub pod wiatr strzalka moze byc odchylana poniewaz pozycja i kurs sa obliczane z rzeczywistego kursu modelu wzgledem ziemi a nie orientacja kadluba modelu do kierunklu lotu (brak magnetometru czy innego czujnika pozycji kadluba) , w sytuacji lotu pod wiatr z predkoscia mniejsza niz wiatr strzalka potrafi pokazac zatem kierunek przeciwny . Z drugiej strony takie zachowanie strzalki pozwala oszacowac warunki wiatru w czasie lotu - potrzeba oczywiscie do tego juz parogodzinnego nalotu FPV aby "oswoic sie" ze sprzetem , potem przy lotach trawersem niuanse strzalki sa wrecz pomocne w walce z wiatrem .
--------------------------------------------------------------------------
==========================================
Mozliwe problemy i sposob postepowania z nimi
GPS przez dlugi czas nie znajduje satelitow .
Zwykle przyczyna dlugiego czasu szukania satelitow jak malej ilosci znalezionych satelitow sa zaklocenia , najczesciej harmoniczne od innych urzadzen wchodzacych w pasmo GPS .
I tak :
- Czasem sa to kamery 5V( jak i niektore 12V) ktore zaklocaja przez swoja przetwornice DC/DC , zwykle dotyczy to tanszych chinskich modeli , ekranowanie kamery moze w tym wypadku pomoc .
- Czasem jest to zlej jakosc napiecie zasilajace , zaklocane np. ESC , stosowanie kondensatorow na torze zasilania wskazane .
- Czasem to nadajnik Video , jego moc jest w satnie calkowicie zaklocic prace GPSu , maksymalne odsuniecie modulu GPS oraz zmiana kanalu nadawania nadajnika Video zwykle rozwiazuje ten problem
- Czasem sa to metalowe czesci blisko modulu GPSu - potrafia przeslaniac i/lub tlumic odbierany sygnal z satelit (sprawdzamy czy GPS jest polozony antena do gory) .
- Czasem to inne przyczyny , np. pogoda , chmury , jonizacja powietrza , bliskosc nadajnika lub przekaznika GSM .
Aby ustalic i zlokalizowac przyczyne musimy na otwartym terenie podlaczyc jedynie OSDz GPSem i wpiac bezposrednio do jakiegos monitora (TV , easycap itp.) - po czym sprawdzic w jakim czasie sa znajdowane i lokalizowane satelity . Zazwyczaj odbywa sie to w ciagu 1 -3 minuty , przy zlej pogodzie (chmury) moze byc troche dluzej .
Po czym dodajemy poszczegolne komponenty zestawu pojedynczo aby zlokalizowac zrodlo zaklocen , a po dodaniu kazdego z elementow odpalamy zestaw , a wiec dodajemy
- kamera
- nadajnik video
- ESC
- odbiorniki RC
- serva
- itp. itd.
Duzo potwierdzonych w praktyce zaklocen dzialania GPSu na modelu ma swoje zrodlo w kamerze (w takim wypadku wymiana kamery) i nadajnikach Video (zmiana kanalu nadawania)
Jesli GPS ma problem ze znalezieniem satelitow jedynie z OSD+GPS+monitor to prosze skontaktowac sie ze mna .
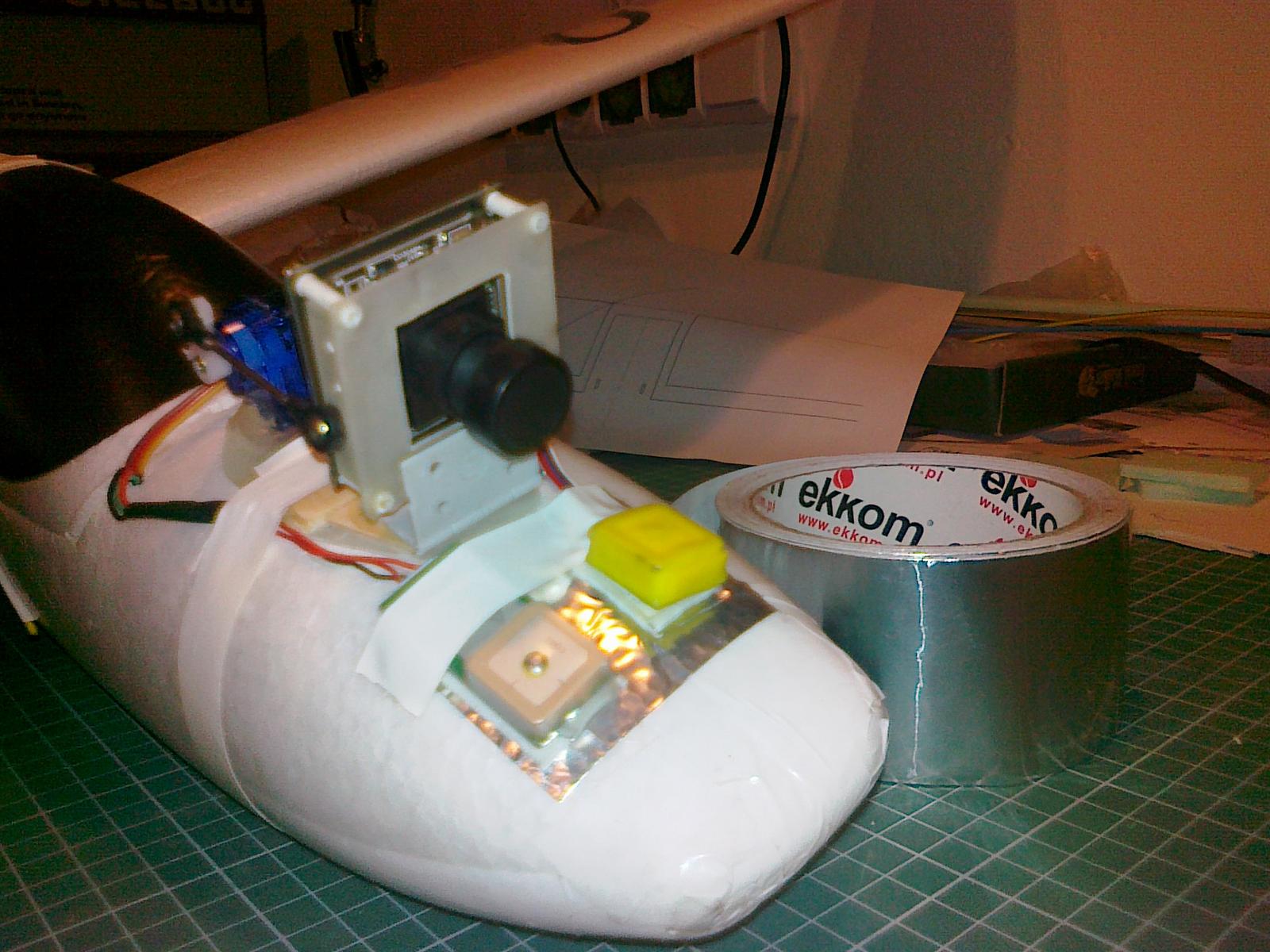
Na koniec maly tip sprawdzony przez userow a opisany i sfotografowany przez mikuna
Pod GPSa podkladamy blaszke alumiowa nie uziemiona okolo 40x40mm .
Tam Gdzie GPS byl bardzo zaklocany z racji upakowania wszystkiego na malym obszarze , teraz lapie 7-8 satelit w czasie niecalej minuty .
Przed modyfikacja :
i po modyfikacji :
Na samolocie :
----------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------
Teraz pare slow o mozliwych uszkodzeniach OSD oraz naprawach - ktore w wiekszosci kazdy moze zrobic w domu .
Ciezko w to uwierzyc ale wiekszosc problemow urzadzen wyslanych do naprawy wynika z przypadkowego przelaczenia PAL-NTSC lub odwrotnie - przez za dlugie przytrzymanie przycisku na OSD - czyz to nie zabawne ?
Strata czasu i pieniedzy na wysylki tylko dlatego , ze dlugo zostal przytrzymany wcisniety czerwony guziczek .
Ten problem postaralem sie wyeliminowac od firwaru 1.69 - system video jest przelaczany tylko po przytrzymaniu guziczka przez dwie sekundy .
--------------------------------
Nastepna w sumie nie czesta usterka sprzetowa ktora moze sie zdazyc to spalenie didy 1n4148 na wejsciu zasilajacym ( to taki maly czarny element przy czerwonym wejsciu zasilajacym) .
Jesli OSD nie dziala mierzymy napiecie wzgledem GND na wejsciu zasilajacym oraz poten ne punkcie oznaczonym 12V , tu napiecie ma byc okolo 0.8V mniejsze od zasilajacego , Jednoczesnie w punkcie 5V powinno byc 5V . Jeslio napiecie na 12V jest duzo mniejsze od zasilajacego - to wymieniamy diode na 1n4148 lub podobna , lub druga od spodu dla wersji plytki v1.2 - jest miejsce na diode w obudowie minimelf .
To , ze dioda na wejsciu czasem sie spali na skutej przypadkowego zwarcia jest jak najbardziej w porzadku , bo dziala ona jak bezpiecznik ktory ma sie przepalic . Przy okazji tez zabezpiecza przed odwrotnym podlaczeniam zasilania .
-------------------------------
Inna czestsza usterka to spalona dioda 1n4148 na wyjsciu zasilania GPSu , ta dioda tez broni OSD przed zwarciem oraz dziala jak bezpiecznik ktory ma sie przepalic w razie zwarcia . Jest to czarny element od dolu blisko wyjscia pinow na GPS . Ojaw to brak wyrywania GPSu .
Aby sprawdzic podpinamy GPS do OSD i mierzymy napiecie w punkcie 5V - ma byc 5V oraz na wyjsciu zasilajacym GPS - ma byc okolo 4.2V - jesli jest mniej lub wcale - wymieniamy diode . Mozna wstawic diode SMD w wiekszej obudowie np. 1206 lub minimelf .
Wymiana diod moze byc przeprowadzona we wlasnym zakresie przy minimalnej umiejetnosci lutowania , jak na zdjeciu .
--------------------------
Inny czesty problem to kiedy do wejscia ENG (wejscie pomiaru napiecia baterii glownej) zostaje podpieta wtyczka odwrotnie , zamieniony + i - , kiedy bateria zasilajaca Video (OSD) tez jest juz podlaczona oraz masy obu tez sa polaczone .
W tym wypadku zawsze pali sie dlawik na masie tego wejscia (ktory dziala jak bezpiecznik) lub dla plytki v1.2 jest to mala sciezka na plytce (tez bezpiecznik) , wiec przepalenie to normalny objaw blednego podlaczenia .
Naprawa- wyjmujemy spalony dlawik i drutujemy pady polaczenia cienkim pojedynczym drucikiem miedzianym odbudowujac bezpiecznik , taki drucim mozemy wyciagnac z jakiegos kabelka linki(wielozylowego) .
Te pady ktore musimy polaczyc pokazane sa na czerwono na obrazku .
----------------------------
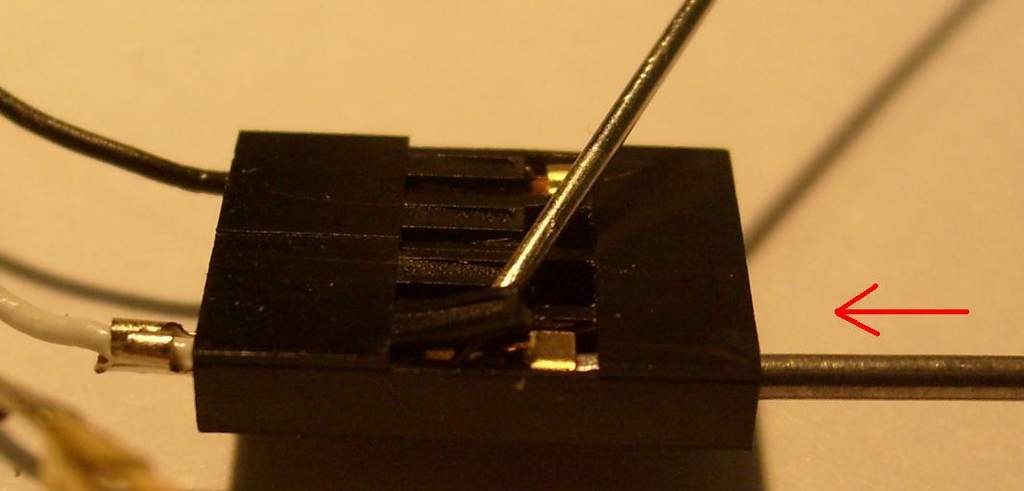
Problemy kabla USB - to sie zdaza kiedy kabel przy czarnej wtyczce zostanie mocniej szarpniety lub pociagniety i zostaje urwany lub przerwany wewnatrz izolacji .
Aby naprawic musimy delikatnie wyjac zlote laczki z czarnego konektorka za pomoca szpilki podwazajacej zapadke i wypychajac cienkim srubokretem , nie ciagniemy za kabel .
Po czym do konektorka trzeba dolutowac kabelek a potem wlozyc konektorek do wtyczki - tym sposobem naprawimy mozliwosc komunikacji z OSD .
Nie cigniemy za kabel ale delikatnie wypychamy konektorek srobokretem .
-----------------------
Kiedy mamy problem z instalacja driverow kabla USB na win7 64bit - mozemy poprostu zastosowac maszyne virtualna a w niej miec zwykly winX . Maszyne virtualna zciagamy z MS . Oto link http://www.microsoft.com/windows/virtua ... fault.aspx
Jest to tez generalne rozwiazanie braku kompatybilnosci Vista czy win7 ze starszym softwarem pracujacym na winXP .
-----------------------
Na szczescie jak do tej pory nie bylo powaznych uszkodzen OSD , zapewne dlatego , ze bezpieczniki spelniaja swoja role do ktorej byly zaprojektowane .
http://www.rcgroups.com/forums/showpost ... count=2373
CDN ......