
Rzeczywiście, chyba nie ma wbudowanego kompasu bo jak odpiąłem ten z GPS-a i podłączyłem do komputera to najpierw pokazywał północ. Ale nadal mam problem bo jest obrócony o 45° w lewo i za nic nie mogę tego skorygować.
EDIT - scalenie
Sprawdziłem dokładnie i chyba coś jest nie tak z tym kompasem. Północ pokazuje dobrze,ale gdy obrócę kopter o 180° to kompas pokazuje, że obrucił się o 200°. Ponowna kalibracja nic nie dała.Co może być przyczyną takiego zachowania ? Próbowałem już nawet podnieść GPS do góry myśląc, że to przez zakłócenia, ale dalej jest to samo.
APM 2.6
Moderatorzy: moderatorzy2014, moderatorzy
Re: APM 2.6
Koledzy pomóżcie bo wałczę już z tym 2 miesiąc...
APM 2.8 (klon) Firmware od 2do numeru 3.2.1 jakbym nie kalibrował to myli mi w MP kierunek prawo /lewo to znaczy kierunek na apm "patrzy" na monitor ALING BOARD =0, kompas rotation_roll=180 (kropeczka sprawdzona)kalibracja zrobiona i..... biorę w prawo a horyzont w MP idzie w lewo biorę w lewo idzie w prawo . obrót APM (board orientation yaw =180 ) i myli gora/dół.
Jestem już wqrzony i nie mam pomysłu co dalej
APM 2.8 (klon) Firmware od 2do numeru 3.2.1 jakbym nie kalibrował to myli mi w MP kierunek prawo /lewo to znaczy kierunek na apm "patrzy" na monitor ALING BOARD =0, kompas rotation_roll=180 (kropeczka sprawdzona)kalibracja zrobiona i..... biorę w prawo a horyzont w MP idzie w lewo biorę w lewo idzie w prawo . obrót APM (board orientation yaw =180 ) i myli gora/dół.
Jestem już wqrzony i nie mam pomysłu co dalej

Re: APM 2.6
No jak masz ustawioną orientację płytki na obrót o 180 stopni to działa dobrze
Re: APM 2.6
właśnie nie działa dobrze .
Myli albo prawo /lewo jeżeli board orientation yaw=0 lub góra dół jeżeli yaw=180 . wgranie nowego firmware nie pomaga (powinno zresetować config)
Myli albo prawo /lewo jeżeli board orientation yaw=0 lub góra dół jeżeli yaw=180 . wgranie nowego firmware nie pomaga (powinno zresetować config)

Re: APM 2.6
Pusc fotki jak to masz pomontowane, na pewno da sie ogarnac, pokaz jak horyzont sie zachwuje jak przechylasz kontroler (moze filmik ze slownym opisem?)rav_wawa pisze:właśnie nie działa dobrze .
Myli albo prawo /lewo jeżeli board orientation yaw=0 lub góra dół jeżeli yaw=180 . wgranie nowego firmware nie pomaga (powinno zresetować config)
Tylko zrob to na fabrycznych ustawieniach
[wysłane mobilnie]
Re: APM 2.6
Jesli przod koptera jest zwrócony do monitora to w zakresie ruchów jest ok.
Jedynie bym kompas ustawil strzałka w kierunku monitora i w ustawieniach wybrał dla kompasu roll180.
Odladalem to na telefonie i nie wszystko u mnie słychać i z uwagi na polaczenie jakość obrazu tez mialem nie najlepsza.
Mam nadzieję że pomogłem...
[wysłane mobilnie]
Jedynie bym kompas ustawil strzałka w kierunku monitora i w ustawieniach wybrał dla kompasu roll180.
Odladalem to na telefonie i nie wszystko u mnie słychać i z uwagi na polaczenie jakość obrazu tez mialem nie najlepsza.
Mam nadzieję że pomogłem...
[wysłane mobilnie]
Re: APM 2.6
rav_wawa, jeśli chodzi Tobie o "sztuczny horyzont" - masz wszystko dobrze przekręcając kopter w prawo horyzont przesuwa się w lewo - przecież to logiczne - przekręć głowę w prawo i zobacz czy podłoga podąża za tobą, czy czasami zostaje w miejscu - czyli zmieniając układ odniesienia - obraca się w lewo ? :D :D
wyobraź sobie, że sztuczny horyzont to okienko samolotu w jakim lecisz i wszystko ci się wyjaśni, a jak nie to nagraj aparatem film przekręć aparat w prawo i zobacz w którą stronę obraca się pokój na nagranym filmie
Natomiast nie wiem, czy nie zamontowałeś źle GPSu - jesli te 180 stopni to roll_180, to znaczy, że układ magnetometru jest od dolnej części płytki (na górnej jest GPS). tylko tyle, więc możesz mieć odwrotnie kompas - najczęściej jest kablem do tyłu.... - ale to sprawdzisz na mapie a nie na sztucznym horyzoncie - on działa dobrze
EDIT wrepinski sorki - pisaliśmy w tym samym czasie... ;)
wyobraź sobie, że sztuczny horyzont to okienko samolotu w jakim lecisz i wszystko ci się wyjaśni, a jak nie to nagraj aparatem film przekręć aparat w prawo i zobacz w którą stronę obraca się pokój na nagranym filmie
Natomiast nie wiem, czy nie zamontowałeś źle GPSu - jesli te 180 stopni to roll_180, to znaczy, że układ magnetometru jest od dolnej części płytki (na górnej jest GPS). tylko tyle, więc możesz mieć odwrotnie kompas - najczęściej jest kablem do tyłu.... - ale to sprawdzisz na mapie a nie na sztucznym horyzoncie - on działa dobrze
EDIT wrepinski sorki - pisaliśmy w tym samym czasie... ;)
Re: APM 2.6
Co do kompasu to kierunek nie jest w orientacji do FC ? bo tak gdzieś wyczytałem.
ok chłopaki dzięki wielkie i stawiam >piwo< ; w nazie (Q250 )mam horyzont odwrotnie i lata ok , bałem się że tu nie jest ok
ok chłopaki dzięki wielkie i stawiam >piwo< ; w nazie (Q250 )mam horyzont odwrotnie i lata ok , bałem się że tu nie jest ok
Re: APM 2.6
Czy po zaniku napięcia w pakiecie aparatury dron powinien przejść w jakiś okreslony tryb? Wiem, że failsafe ustawia się na utratę zasięgu i napięcie pakietu drona, ale czy na napięcie apki? Bo ostatnio się zagapiłem i po zaniku napięcia (nie wyłączeniu apki) dron poleciał przed siebie na pełnym gazie
Re: APM 2.6
Tak, ustawia się to w zakładce failsafe:lukas90 pisze:Czy po zaniku napięcia w pakiecie aparatury dron powinien przejść w jakiś okreslony tryb? Wiem, że failsafe ustawia się na utratę zasięgu i napięcie pakietu drona, ale czy na napięcie apki? Bo ostatnio się zagapiłem i po zaniku napięcia (nie wyłączeniu apki) dron poleciał przed siebie na pełnym gazie
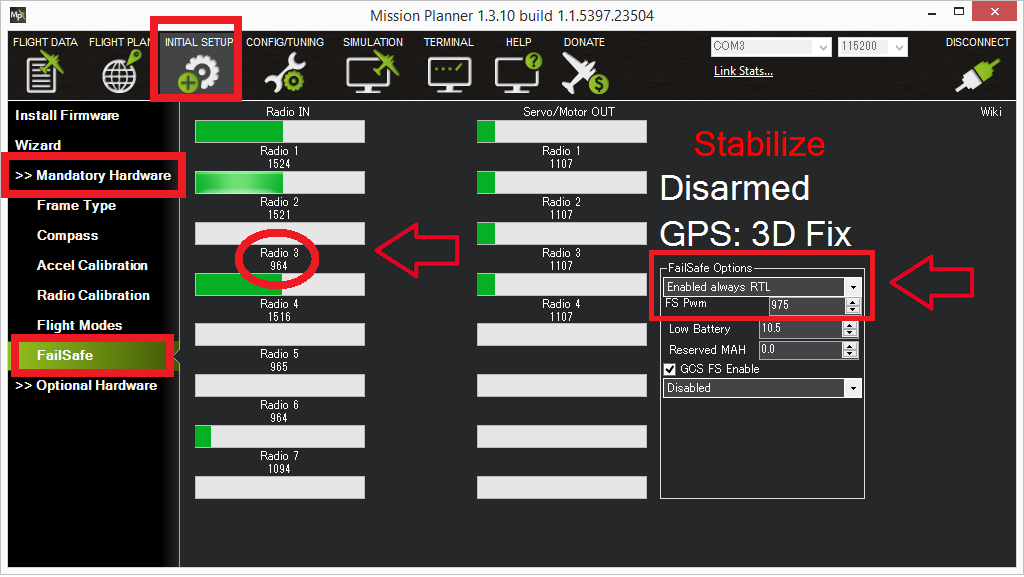
przy podłączonym Mission Planner i włączonej aparaturze - zobacz, czy wyłączając ją wartość gazu zmienia się na jakąś niską wartość. to zależy przede wszystkim od odbiornika - czy taką wartość wystawia. - Napisz jaki masz link (nadajnik i odbiornik) to może ktoś coś ci podpowie.
Jako ciekawostkę powiem tylko, że u mnie to nie działało do puki nie wgrałem nowszego softu do dekodera PPM w APMie. Wtedy miałem kiepski firmowy link FlySky. co ciekawe - na innym kontrolerze działało - więc problem był po stronie APM
Re: APM 2.6
Właśnie o to chodzi, że mialem ustawiony FailSafe na utratę sygnału. Działało to dobrze- po wyłączeniu aparatury dron przechodził w RTL.
Ale po mocnym spadku napięcia apki tak jakby nie wyłączyła się całkowicie- ekran się wyłączył i jakieś tam piknięcia się pojawiły. Nie wiem co wtedy się stało, ale nie była to utrata zasięgu. Quad załapał jakieś dziwne informacje po czym zrobił co mu się podobało
Ale po mocnym spadku napięcia apki tak jakby nie wyłączyła się całkowicie- ekran się wyłączył i jakieś tam piknięcia się pojawiły. Nie wiem co wtedy się stało, ale nie była to utrata zasięgu. Quad załapał jakieś dziwne informacje po czym zrobił co mu się podobało
Re: APM 2.6
mój kopter jest strasznie podatny na wiatr. Nawet przy słabym wietrze buja nim tak że aż nieprzyjemnie się patrzy na niego... jakie parametry są za to odpowiedzialne? gąbka na baro oczywiście jest, INS_MPU coś tam - ustawiony na 20Hz
Re: APM 2.6
maxxxior, równie dobrze mozesz mieć slabo ustawione pid - jak kopter kontruje za slabo, albo chyba w twoim przypadku za mocno to przelatuje poza swoja pozycje, po czym znow kontra i znow za duza... skutkiem czego moze bujac w okolicach swojej zamierzonej pozycji.... takie zgadywanie, ale mozna zapisac aktualne pidy (jako beckup w razie "w") i poeksperymentowac.
Re: APM 2.6
na dniach przyszedł do mnie Beitian BN-800. Po podłączeniu i poczekaniu kilkunastu minut złapał fixa, w domu 7-10 satelitów ale HDOP strasznie kiepskie (czasami przy 9 satelitach potrafi skoczyć do 9-10). Czy to normalne w domu? chciałem podłączyć go do u-center poprzez MissionPlannera ale w u-center 8.x.x nie mogę znaleźć pola do wpisania portu tak jak tutaj jest to opisane: http://ardupilot.org/copter/docs/common-ublox-gps.html i nie wiem co i jak poustawiać żeby było dobrze. Pomoże ktoś?