OSD by Zbig & Pitlab
Moderatorzy: marbalon, moderatorzy2014, moderatorzy

Re: OSD by Zbig & Pitlab
wieka szkoda :(, zabawa jest przednia!.

Re: OSD by Zbig & Pitlab
I ja wchodzę w system Pitlab, mając już trochę doświadczenia z INAV i Ardupilotem. Trzecie środowisko, znów nauka od zera. Męczę naszego forumowego kolegę już na messengerze (biedak ;) ) ale może i tutaj się odezwę celem wyjaśnienia kilku wątpliwości, czy dobrze doczytałem instrukcję.
1. Moduł OSD wymaga zasilania 12V więc podpięcie 4s pakietu go usmaży - rozwiązanie to BEC 12V albo wpięcie się do pinów balancera pakietu i wyciągnięcie z niego zasilania 3s.
2. Sam Pitlab ma 3 tryby lotu - manualny, stabilizacja i full automatyczny. Rozumiem, że w trybie stabilizacji FC nie kontroluje gazu i należy to robić ręcznie celem utrzymania prędkości, wznoszenia itp? Dokładnie chodzi mi o to, że ja w Arduplane lubię tryb CRUISE gdzie model leci autonomicznie przed siebie tak długo jak ja chcę, bez żadnej misji itp. Nie widzę tej opcji w Pitlabie, albo źle interpretuję instrukcję?
3. Crossfire - ponieważ przełączę crossfire z protokołu CRSF na SBus tracę w tym momencie telemetrię do nadajnika? I czy da się wtedy na OSD wyciągnąć informację o stanie sygnału?
1. Moduł OSD wymaga zasilania 12V więc podpięcie 4s pakietu go usmaży - rozwiązanie to BEC 12V albo wpięcie się do pinów balancera pakietu i wyciągnięcie z niego zasilania 3s.
2. Sam Pitlab ma 3 tryby lotu - manualny, stabilizacja i full automatyczny. Rozumiem, że w trybie stabilizacji FC nie kontroluje gazu i należy to robić ręcznie celem utrzymania prędkości, wznoszenia itp? Dokładnie chodzi mi o to, że ja w Arduplane lubię tryb CRUISE gdzie model leci autonomicznie przed siebie tak długo jak ja chcę, bez żadnej misji itp. Nie widzę tej opcji w Pitlabie, albo źle interpretuję instrukcję?
3. Crossfire - ponieważ przełączę crossfire z protokołu CRSF na SBus tracę w tym momencie telemetrię do nadajnika? I czy da się wtedy na OSD wyciągnąć informację o stanie sygnału?

Re: OSD by Zbig & Pitlab
1. Dokładnie to 12V zasila kamerę nadajnik video i OSD. Napięcie 4S może go usmażyć, więc np. BEC12V jest dobrym rozwiązaniem (eliminuje też ew. zakłócenia od silnika).
2. Autopilot ma 3 podstawowe tryby lotu: manual, stab i auto, ale auto ma 3 pod-tryby wybierane drążkiem gazu:
w dole- powrót do bazy/nad lotnisko, lub automatyczne lądowanie jeśli wybrano taką opcję.
po srodku - HOLD - utrzymanie kursu (przez 5km) i wysokości (drązek lotek i wysokości zmieniają odpowiednio kurs i wysokość), albo lot autonomiczny po punktach trasy (gdy wybrano trasę).
w górze - krążenie nad punktem
3. OSD może nadawać dane telemetryczne jako Mavlink na wyjściu UART. Równiez GroundStation może wysyłać odebrane z OSD dane telemetryczne w mavLink
2. Autopilot ma 3 podstawowe tryby lotu: manual, stab i auto, ale auto ma 3 pod-tryby wybierane drążkiem gazu:
w dole- powrót do bazy/nad lotnisko, lub automatyczne lądowanie jeśli wybrano taką opcję.
po srodku - HOLD - utrzymanie kursu (przez 5km) i wysokości (drązek lotek i wysokości zmieniają odpowiednio kurs i wysokość), albo lot autonomiczny po punktach trasy (gdy wybrano trasę).
w górze - krążenie nad punktem
3. OSD może nadawać dane telemetryczne jako Mavlink na wyjściu UART. Równiez GroundStation może wysyłać odebrane z OSD dane telemetryczne w mavLink
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
Re: OSD by Zbig & Pitlab
Dzięki za odpowiedź.
Ad.1 - mam jakiś BEC 12V Mateka to mogę go wykorzystać, a sam nadajnik video mógłbym nawet puścić bezpośrednio z 4s bo spokojnie moje nadajniki video to przyjmują.
Ad.2 - czyli nie doczytałem w instrukcji, albo tego tam nie ma? Znajomy z Holandii wspominał mi o limicie 5km, twierdził, że w czasie długiego lotu do WC nie może pójść bo mu model zaczyna wracać do bazy :D
Ad.3 - czyli mógłbym odbiornik Crossfire podpiąć do UART TX i RX, w nim odpowiednio ustawić Mavlink i to powinno sprawić, że dostanę z powrotem telemetrię do radia? Używam LUA telemetry i fajnie tam jest móc monitorować podstawowe parametry lotu, komunikaty głosowe też są przyjemne, a nawet monitorowanie na żywo lotu modelu na mapach google.
Ostrzegam, że będę pytał dalej :P
A, muszę sobie zrobić kabel do podpięcia kontrolera do monitora FPV bez konieczności używania nadajnika video żeby ustawić podstawowe parametry przed pierwszym lotem.
Ad.1 - mam jakiś BEC 12V Mateka to mogę go wykorzystać, a sam nadajnik video mógłbym nawet puścić bezpośrednio z 4s bo spokojnie moje nadajniki video to przyjmują.
Ad.2 - czyli nie doczytałem w instrukcji, albo tego tam nie ma? Znajomy z Holandii wspominał mi o limicie 5km, twierdził, że w czasie długiego lotu do WC nie może pójść bo mu model zaczyna wracać do bazy :D
Ad.3 - czyli mógłbym odbiornik Crossfire podpiąć do UART TX i RX, w nim odpowiednio ustawić Mavlink i to powinno sprawić, że dostanę z powrotem telemetrię do radia? Używam LUA telemetry i fajnie tam jest móc monitorować podstawowe parametry lotu, komunikaty głosowe też są przyjemne, a nawet monitorowanie na żywo lotu modelu na mapach google.
Ostrzegam, że będę pytał dalej :P
A, muszę sobie zrobić kabel do podpięcia kontrolera do monitora FPV bez konieczności używania nadajnika video żeby ustawić podstawowe parametry przed pierwszym lotem.
Re: OSD by Zbig & Pitlab
Limit jest tylko dla trybu HOLD, po jego osiągnięciu model nie wraca, tylko krąży nad punktem. Ale każde wychylenie lotek lub wysokości wydłuża limit o kolejne 5km. Dla waypointów/tras nie ma takiego limitu.
Musisz wyjście SBUS crossfire podpiąć do wejścia 1 (SBUS) autopilota, a wyjście UART z OSD podpiąć do wejścia telemetrii Crossfire (OSD nie przyjmuje mavlinka, może go tylko wysyłać). No i wszystko skonfigurować.
p.s.
Jakbyś mógł przy okazji konfiguracji telemetrii/skryptów zrobić jakieś fotki i opisy, to wrzuciłbym do bazy wiedzy dla innych.
Musisz wyjście SBUS crossfire podpiąć do wejścia 1 (SBUS) autopilota, a wyjście UART z OSD podpiąć do wejścia telemetrii Crossfire (OSD nie przyjmuje mavlinka, może go tylko wysyłać). No i wszystko skonfigurować.
p.s.
Jakbyś mógł przy okazji konfiguracji telemetrii/skryptów zrobić jakieś fotki i opisy, to wrzuciłbym do bazy wiedzy dla innych.
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
Re: OSD by Zbig & Pitlab
Ok, rozumiem.
W weekend postaram się to w końcu na stole uruchomić, nie spieszy mi się bardzo, mając ponad 10 innych maszyn FPV czekających na swoją kolej do lotu. Będę informował o postępach, a jak się uda zgrać to z Crossfire na dwukierunkowej transmisji to będzie fajnie. Oczywiście podrzucę wszelkie informacje, które mogą się przydać.
A przy okazji, bo nie mam w zestawie pilota 3przyciskowego więc jestem na ten moment uziemiony - da się taki na szybko zrobić samemu? Podejrzewam, że tu trzeba wartościami rezystorów się pobawić, żeby to funkcjonowało.
W weekend postaram się to w końcu na stole uruchomić, nie spieszy mi się bardzo, mając ponad 10 innych maszyn FPV czekających na swoją kolej do lotu. Będę informował o postępach, a jak się uda zgrać to z Crossfire na dwukierunkowej transmisji to będzie fajnie. Oczywiście podrzucę wszelkie informacje, które mogą się przydać.
A przy okazji, bo nie mam w zestawie pilota 3przyciskowego więc jestem na ten moment uziemiony - da się taki na szybko zrobić samemu? Podejrzewam, że tu trzeba wartościami rezystorów się pobawić, żeby to funkcjonowało.
Re: OSD by Zbig & Pitlab
Możesz sterować menu 3 pozycyjnym przełącznikiem aparatury. Mniej wygodnie, ale prawie wszystko można ustawić.
W klawiaturze do każdego przycisku jest jeden opornik. Wartości to 2.7k, 1k, 330 Ohm
W klawiaturze do każdego przycisku jest jeden opornik. Wartości to 2.7k, 1k, 330 Ohm
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
Re: OSD by Zbig & Pitlab
W sklepie Pitlab-a dostępna jest już najnowsza wersja 4.0 zintegrowanego na jednej płytce systemu FPV OSD+Autopilot.
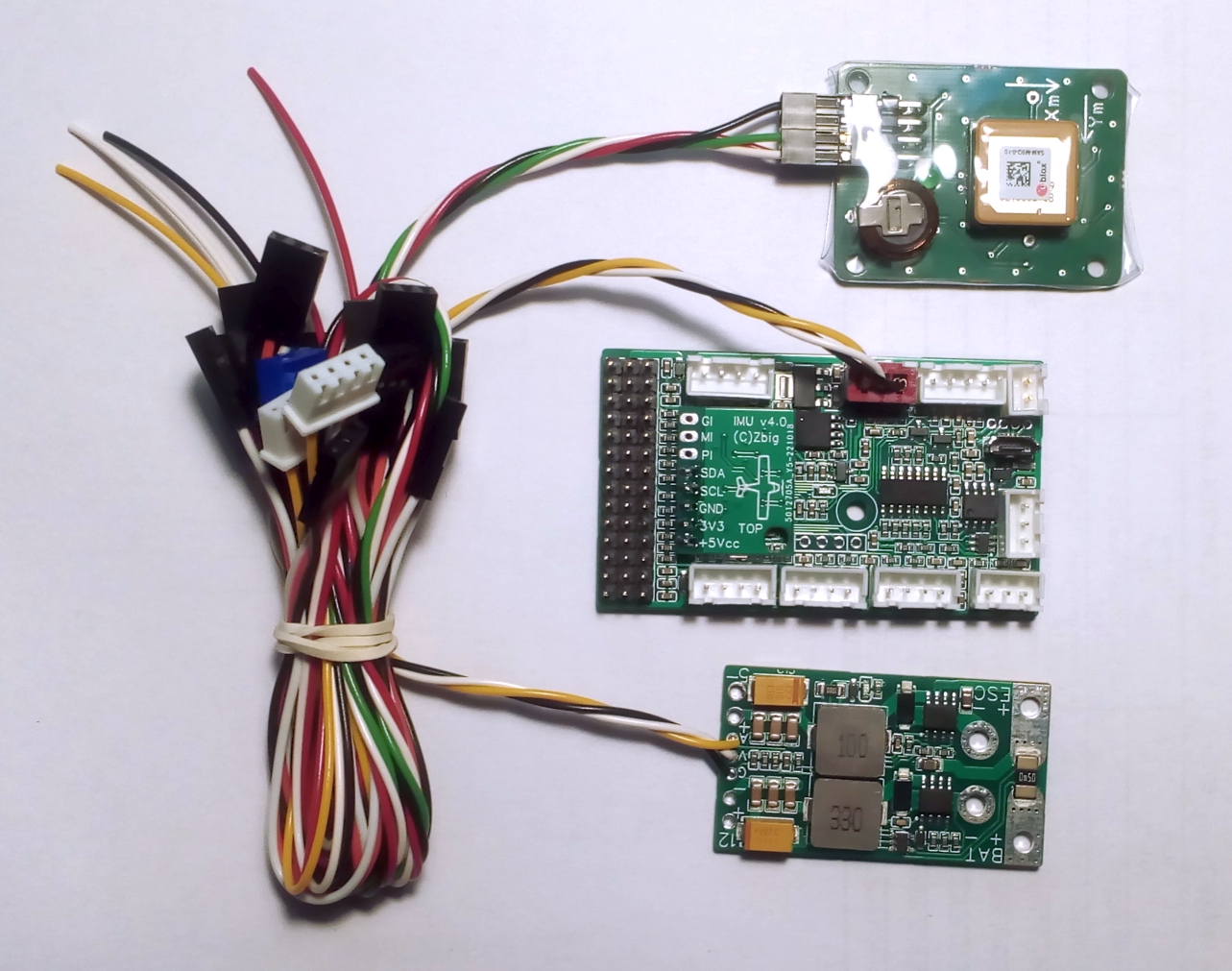
Zachowana jest większość funkcjonalności znanej (i lubianej) z wersji 2.72, ale są też nowości.
Płytka jest mniejsza, wyposażona w dwurdzeniowy procesor ARM z dużym potencjałem rozwoju, oraz dwa wejścia wideo przełączane z kanału RC (obsługujemy PAL lub NSTSC). Ponadto system współpracuje z systemami video HD w systemie MSP Displayport, kopiując układ wybranego layoutu oraz menu na ekran gogli lub monitora HD. Obsługujemy systemy DJI (z modem fpv-wtf) oraz Walksnail Avatar HD (zarówno gogle jak też najnowszy VRx - bez żadnych modyfikacji). Systemem HD zero również będziemy obsługiwany, ale jeszcze nad tym pracujemy (jeśli ktoś ma ten system i byłby chętny do testów proszę o info).
Do tego w zestawie mamy podwójny UBEC 5V/4A i 12V/2A ze zintegrowanym pomiarem prądu i napięcia baterii napędowej.
Zapraszamy na zakupy, zanim wystawimy produkt na cały świat w angielskojęzycznym sklepie.
Zachowana jest większość funkcjonalności znanej (i lubianej) z wersji 2.72, ale są też nowości.
Płytka jest mniejsza, wyposażona w dwurdzeniowy procesor ARM z dużym potencjałem rozwoju, oraz dwa wejścia wideo przełączane z kanału RC (obsługujemy PAL lub NSTSC). Ponadto system współpracuje z systemami video HD w systemie MSP Displayport, kopiując układ wybranego layoutu oraz menu na ekran gogli lub monitora HD. Obsługujemy systemy DJI (z modem fpv-wtf) oraz Walksnail Avatar HD (zarówno gogle jak też najnowszy VRx - bez żadnych modyfikacji). Systemem HD zero również będziemy obsługiwany, ale jeszcze nad tym pracujemy (jeśli ktoś ma ten system i byłby chętny do testów proszę o info).
Do tego w zestawie mamy podwójny UBEC 5V/4A i 12V/2A ze zintegrowanym pomiarem prądu i napięcia baterii napędowej.
Zapraszamy na zakupy, zanim wystawimy produkt na cały świat w angielskojęzycznym sklepie.
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
-
marimach77

- Posty: 891
- Rejestracja: poniedziałek 29 lis 2010, 14:56
- Lokalizacja: Warszawa

Re: OSD by Zbig & Pitlab
Super pomysł z czujnikiem prądu i BEC-ami.
Jak rozumiem z 12V można zasilić cały moduł AP. Jak wygląda kwestia zakłóceń toru video, czy konieczne jest stosowanie dodatkowego filtra, czy wystarczy to że sa odseparowane przetwornicami?
Jak rozumiem z 12V można zasilić cały moduł AP. Jak wygląda kwestia zakłóceń toru video, czy konieczne jest stosowanie dodatkowego filtra, czy wystarczy to że sa odseparowane przetwornicami?
Pozdrawiam Darek
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
Re: OSD by Zbig & Pitlab
Tak, na więcej nie było miejsca. Mamy za to opracowany STL do wydrukowania obudowy, którą można przyczepić np. na rzepa (zresztą samoprzylepnego rzepa można też dokleić od spodu bezpośrednio do płytki
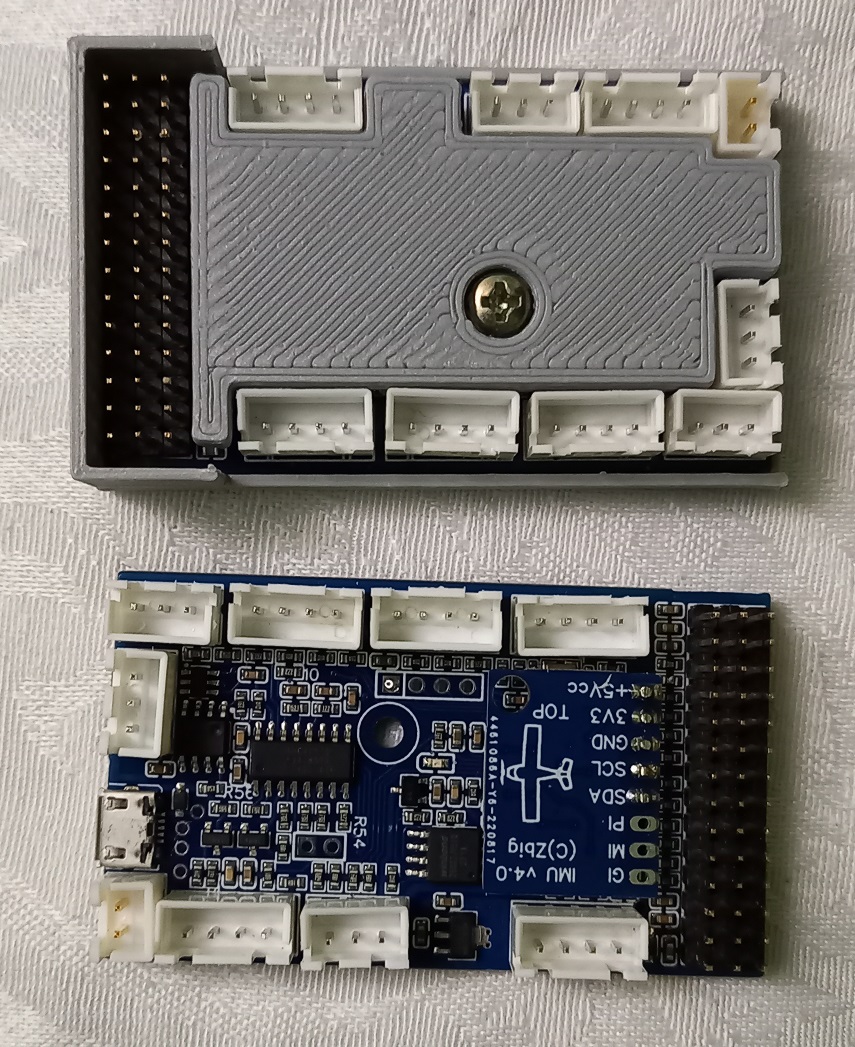
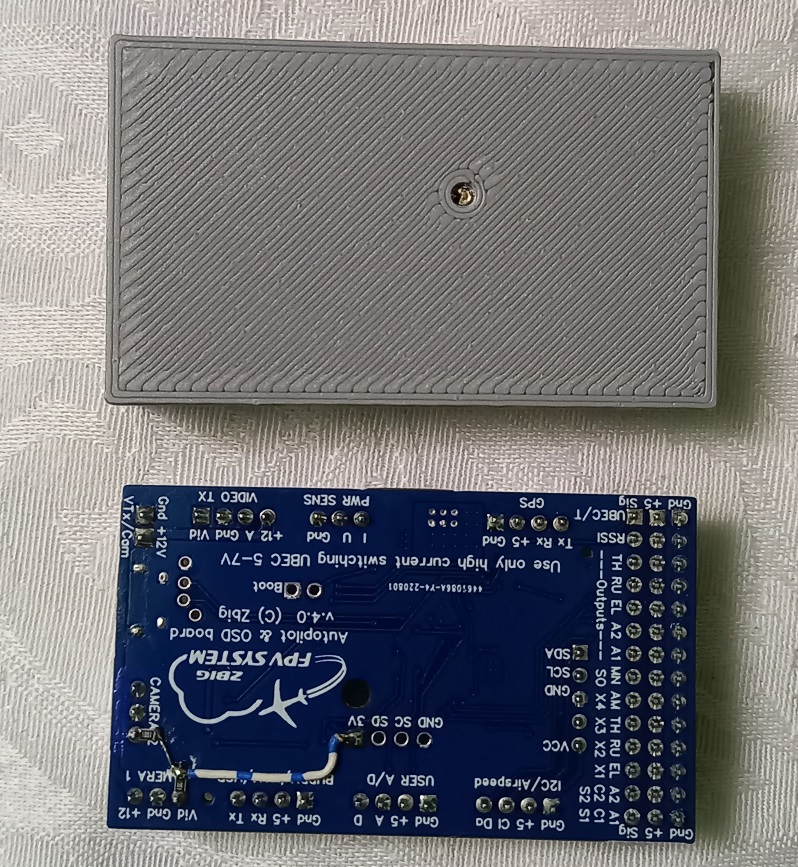
n.b. wersja rynkowa płytki ma pionowe złącze USB i nie żadnych kabelków od spodu
UBEC12V jest przeznaczony do zasilania kamery video i nadajnika VTX (dla zasilania z pakietu 4s..6s) - bo autopilot/OSD jest zasilany zasadniczo z UBEC-a 5V (od serw) i nie wymaga dodatkowego 12V do pracy, ale z 12V jest "pociągnięte" rezerwowe zasilanie, gdyby na UBEC-u 5V wystąpiły jakieś mocne spadki napięcia. Żadne dodatkowe filtry nie są potrzebne, stabilizatory mają małe tętnienia, bo na płytce upchaliśmy naprawdę potężną baterię kondensatorów
p.s. UBEC-e można kroplą cyny przestawić odpowiednio na 6V (wysokonapięciowe serwa), oraz 11V (lepsza stabilizacja napięcia dla rozładowanego pakietu 4s, a bez znaczenia dla mocy nadawania VTx)
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
Re: OSD by Zbig & Pitlab
Czyli w przypadku poprzedniej wersji AP można go zasilić z BEC-a 12V na module pomiaru prądu.
Pisząc co zakłóceniach bardziej mi chodzi o zakłócenia toru wideo od pracujących silników i regulatorów. Zawsze w przypadku zasilania z jednego źródła napięcia konieczne było stosowanie dodatkowego filtru likwidującego takie zakłócenia
Pisząc co zakłóceniach bardziej mi chodzi o zakłócenia toru wideo od pracujących silników i regulatorów. Zawsze w przypadku zasilania z jednego źródła napięcia konieczne było stosowanie dodatkowego filtru likwidującego takie zakłócenia
Pozdrawiam Darek
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
Re: OSD by Zbig & Pitlab
Tak, jeśli użyjesz go do zasilania starego OSD/AP, to wyjście +12V jest do zasilania OSD, kamery i nadajnika video.
Zakłócenia od pracującego silnika/serw są wystarczająco filtrowane i nie trzeba dodatkowych filtrów przy zasilaniu z jednego pakietu.
Oczywiście przetwornice są step-down, czyli napięcie pakietu musi być co najmniej 1V wyższe od napięcia wyjściowego, aby układ skutecznie stabilizował napięcie wyjściowe.
Zakłócenia od pracującego silnika/serw są wystarczająco filtrowane i nie trzeba dodatkowych filtrów przy zasilaniu z jednego pakietu.
Oczywiście przetwornice są step-down, czyli napięcie pakietu musi być co najmniej 1V wyższe od napięcia wyjściowego, aby układ skutecznie stabilizował napięcie wyjściowe.
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107

Re: OSD by Zbig & Pitlab
Mój Skywalker1900 przelatał na wersji 4.0 około 1300km nie licząc 35000km które zaliczył na wcześniejszej wersji i ma się bardzo dobrze .
Tak więc mimo trudności na rynku elektroniki Zbig&Pitlab nadal w grze.
A teraz czas na testy OSD/AP w połączeniu z linkiem HD, który jest również możliwy w tej konstrukcji. W moim przypadku to Walksnail Avatar VRX.
Na zdjęciu montaż wewnątrz SW1900 pod skrzydłem. Dolna część obudowy przyklejona na stałe.
Dwie kamerki na pokładzie.
https://youtu.be/M8UIRvb0YxY
Tak więc mimo trudności na rynku elektroniki Zbig&Pitlab nadal w grze.
A teraz czas na testy OSD/AP w połączeniu z linkiem HD, który jest również możliwy w tej konstrukcji. W moim przypadku to Walksnail Avatar VRX.
Na zdjęciu montaż wewnątrz SW1900 pod skrzydłem. Dolna część obudowy przyklejona na stałe.
- ZbigLab.jpg (66.4 KiB) Przejrzano 932 razy
https://youtu.be/M8UIRvb0YxY
Zbyszek
