No właśnie nie za bardzo. Jak wyżej wspomniałem drugi lot odbył się od razu w AltHold i puściliśmy AutoTune. Wszystko było pięknie do momentu, kiedy w 6m45s kopter sam nagle zrobił zjazd z wysokości, pomimo, że drążek w dół nie poszedł, co widać w logach.Tanner pisze:No ale jak alt-hold działa już normalnie, to startuj w nim
Jaki akumulator kupić 3S/4S? Budowa pierwszego koptera.
Moderatorzy: moderatorzy2014, moderatorzy
Re: Jaki akumulator kupić 3S/4S, producent?
Tak, pamiętam o tym przestawieniu, ale specjalnie zrobiliśmy najpierw lot w Stabilize aby właśnie odczytać na ile mamy drąg.
Re: Jaki akumulator kupić 3S/4S, producent?
No to w sumie nie ma problemu, po prostu pamiętaj ze w alt hold kopter wisi jak drąg masz na 50%. I przeczytaj dokładnie opisy każdego trybu lotu na którym zamierzasz latać w dokumentacji, to naprawdę pomaga.labo pisze:Tak, pamiętam o tym przestawieniu, ale specjalnie zrobiliśmy najpierw lot w Stabilize aby właśnie odczytać na ile mamy drąg.
Moim zdaniem za dużo rzeczy robisz na raz, wiec trochę nie wiemy czy zrobił zjazd w dół bo althold źle działa czy jeszcze coś innego. Po co tak naprawdę robisz autotune, czy jak wisisz w stabilize to dron wpada w oscylacje, giba się, nerwowo trzyma poziom? Jak nie, a wnioskuje, że nie, to olej na początek autotune, wystartuj w stabilize, poleć sobie na 10 metrów do góry, przełącz na alt-hold i daj drążek przepustnicy na połowę i wiś tak w miejscu. Wyląduj po 5 minutach, zmierz napięcie pakietu miernikiem uniwersalnym, niczym innym. Tyle, to nam dużo rozjaśni.labo pisze:No właśnie nie za bardzo. Jak wyżej wspomniałem drugi lot odbył się od razu w AltHold i puściliśmy AutoTune. Wszystko było pięknie do momentu, kiedy w 6m45s kopter sam nagle zrobił zjazd z wysokości, pomimo, że drążek w dół nie poszedł, co widać w logach.
Zmierzyłes miernikiem napięcie pakietu po wylądowaniu? Bo zakładamy że pixhawk źle mierzy napięcie a miernik akumulatora który pokazuje to w procentach to jeszcze gorszy pomocnik. Zmierz miernikiem po wylądowaniu, jak opisałem wyżej, i daj znać.labo pisze:Wg Pixhawka lataliśmy do 9,0V. Po wylądowaniu miernik akumulatora na złącze: pozostało 10% pojemności.
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Jaki akumulator kupić 3S/4S, producent?
Po wylądowaniu pakiet sprawdzałem za pomocą:
Sprawdzałem kiedyś jego skalowanie dla napięcia i było OK (mam go od lat jeszcze z samolotów). Nie pamiętam jakie napięcie pokazał, ale na celach zostało po 10%.
Po powrocie sprawdzałem multimetrem skalowanie napięcia Power Module w Mission Planerze jak i sprawdziłem piszczek czy dobrze wskazuje. Oba były OK. Nie wiem skąd ten rozjazd teraz wskazania napięcia w MP, bo na poprzednim PM było dobrze (ale nie działał amperomierz).
OK, na następną wycieczkę wezmę multimetr w torbę.
Generalnie wisieliśmy w sumie 14 minut, co jak na nasze 3S i 2,6kg, nie jest chyba źle.
EDIT:
http://ardupilot.org/copter/docs/ac_thr ... r-throttle
EDIT2: Jak u się z hostingu forumowego korzysta, bo chyba coś takiego było.. Bym wrzucił obrazek...
Sprawdzałem kiedyś jego skalowanie dla napięcia i było OK (mam go od lat jeszcze z samolotów). Nie pamiętam jakie napięcie pokazał, ale na celach zostało po 10%.
Po powrocie sprawdzałem multimetrem skalowanie napięcia Power Module w Mission Planerze jak i sprawdziłem piszczek czy dobrze wskazuje. Oba były OK. Nie wiem skąd ten rozjazd teraz wskazania napięcia w MP, bo na poprzednim PM było dobrze (ale nie działał amperomierz).
OK, na następną wycieczkę wezmę multimetr w torbę.
Generalnie wisieliśmy w sumie 14 minut, co jak na nasze 3S i 2,6kg, nie jest chyba źle.
EDIT:
Teraz widzę nazywa to się inaczej, tylko nie wiem czy to ruszać bo się niby samo uczy...Tanner pisze: hover throtle - tak abyś te 1320-1360 w stabilize miał właśnie w okolicy środka drążka
http://ardupilot.org/copter/docs/ac_thr ... r-throttle
EDIT2: Jak u się z hostingu forumowego korzysta, bo chyba coś takiego było.. Bym wrzucił obrazek...
Re: Jaki akumulator kupić 3S/4S, producent?
Dopiero dwa dni temu mogliśmy iść polatać. Słabo się lata na pidach domyślnych (mamy masę mocno rozsuniętą przód-tył; kamerka wystaje przed ramiona), dlatego zdecydowaliśmy się jednak na Autotune. Początkowo nam nie zareagował na przełącznik Autotune, ale w końcu ruszył. Nasz czas latania to 14 minut i niestety Autotune się nie wykonał, no ale latalismy sobie na początku. Po locie cele pomierzone multimetrem i miały po 3,6V.
W domu zmieniłem ustawienia RC1_DZ do RC4_DZ na 50.
Dzisiaj poszliśmy polatać jeszcze raz. Start w AltHold i od razu Autotune. Kopter się bujał a my czasami ściągaliśmy go do siebie. Niestety u nas czas 14 minut nie wystarczył na Autotuning. Zrobił dwie osie, trzeciej nie zdążył i musieliśmy lądować. Zjechaliśmy akumulator pod obciążeniem do 3V/celę.
Będziemy musieli pobawić się parametrem AUTOTUNE_AXES i podzielić proces na kilka (dwa?) wyjścia.
EDIT: Dzisiaj było całkowicie bezwietrznie i nie musieliśmy go tyle korygować. Pierwsze dwie osie zrobione. Dzisiaj pewnie by zdążył wszystkie trzy, bo pierwsze dwie zrobił o dwie minuty krócej.
EDIT2:Wczoraj poszliśmy robić Autotune w osi Yaw. Kopter kręcił się cały czas lotu. Przeciągnęliśmy lot do końca prądu licząc, że może się zmieści w czasie, w ostatniej chwili ściągnęliśmy do siebie (odlatywał dzisiaj trochę z wiatrem) i wylądowaliśmy. Nie wiemy czy Autotune się wykonało poprawnie i całe, bo nie możemy znaleźć potwierdzenia tego w logach, ale o tym tutaj: http://rc-fpv.pl/viewtopic.php?f=60&t=46223
Co prawda nowe wartości się pojawiły w PIDach w osi Yaw, ale czy skończył proces czy nie, to nie wiemy. Ściągnęliśmy go na koniec prądu i nie wiemy czy wykonał się do końca. W logach wygląda jakby step 4 zakończył się o 20:17, a majtało nim od początku do końca lotu.
Niestety używając Auto Analysis, znalazłem wpis:
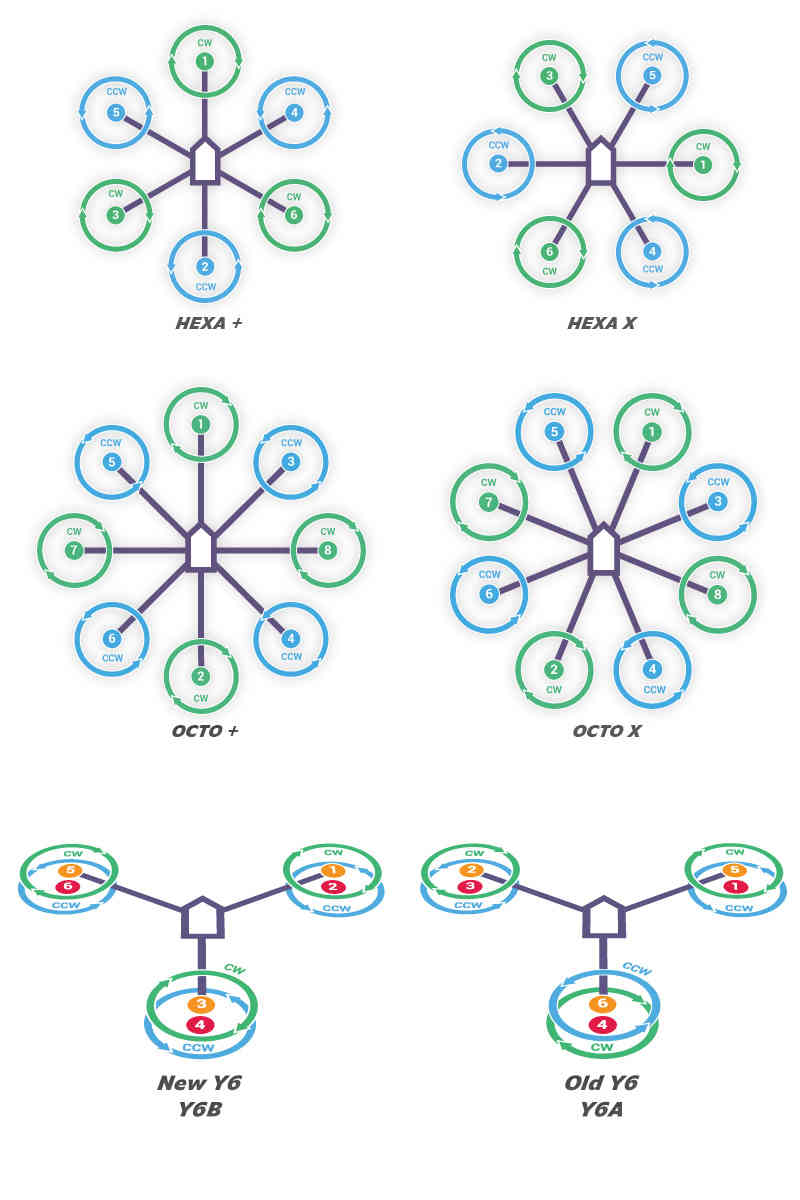
"Test: Motor Balance = WARN - Motor channel averages = [1675, 1584, 1652, 1616, 1648, 1621] Average motor output = 1632 Difference between min and max motor averages = 91", co mnie zmartwiło, bo zawsze mieliśmy GOOD.
Czy mogę prosić o pomoc w ustaleniu, który to silnik i jakie mogą być przyczyny?
Gdyby ktoś raczył popatrzeć w log: Log do pobrania.
Czy to silnik 2 z HEXA X z poniższego rysunku?
https://discuss.ardupilot.org/uploads/d ... 5880c6.jpg (url, bo obrazek za duży)
EDIT3: Chyba doszedłem skąd jest komunikat:
"Test: Motor Balance = WARN - Motor channel averages = [1675, 1584, 1652, 1616, 1648, 1621] Average motor output = 1632 Difference between min and max motor averages = 91"
Ustawieni byliśmy zawsze w tym samym kierunku i po ucieczce z wiatrem zawsze wracaliśmy w lewo. Na wykresie widać, że C2 odstaje tylko w powrotach, nie w zawisie, ale wtedy ten silnik mniej pracuje.
Martwi mnie natomiast to, że max wartości C (najlepiej widać na czerwonym C1 po rozciągnięciu wykresu) to 1867 a nie 1950. Z czego to może wynikać? Kalibracja aparatury zrobiona.
W domu zmieniłem ustawienia RC1_DZ do RC4_DZ na 50.
Dzisiaj poszliśmy polatać jeszcze raz. Start w AltHold i od razu Autotune. Kopter się bujał a my czasami ściągaliśmy go do siebie. Niestety u nas czas 14 minut nie wystarczył na Autotuning. Zrobił dwie osie, trzeciej nie zdążył i musieliśmy lądować. Zjechaliśmy akumulator pod obciążeniem do 3V/celę.
Będziemy musieli pobawić się parametrem AUTOTUNE_AXES i podzielić proces na kilka (dwa?) wyjścia.
EDIT: Dzisiaj było całkowicie bezwietrznie i nie musieliśmy go tyle korygować. Pierwsze dwie osie zrobione. Dzisiaj pewnie by zdążył wszystkie trzy, bo pierwsze dwie zrobił o dwie minuty krócej.
EDIT2:Wczoraj poszliśmy robić Autotune w osi Yaw. Kopter kręcił się cały czas lotu. Przeciągnęliśmy lot do końca prądu licząc, że może się zmieści w czasie, w ostatniej chwili ściągnęliśmy do siebie (odlatywał dzisiaj trochę z wiatrem) i wylądowaliśmy. Nie wiemy czy Autotune się wykonało poprawnie i całe, bo nie możemy znaleźć potwierdzenia tego w logach, ale o tym tutaj: http://rc-fpv.pl/viewtopic.php?f=60&t=46223
Co prawda nowe wartości się pojawiły w PIDach w osi Yaw, ale czy skończył proces czy nie, to nie wiemy. Ściągnęliśmy go na koniec prądu i nie wiemy czy wykonał się do końca. W logach wygląda jakby step 4 zakończył się o 20:17, a majtało nim od początku do końca lotu.
Niestety używając Auto Analysis, znalazłem wpis:
"Test: Motor Balance = WARN - Motor channel averages = [1675, 1584, 1652, 1616, 1648, 1621] Average motor output = 1632 Difference between min and max motor averages = 91", co mnie zmartwiło, bo zawsze mieliśmy GOOD.
Czy mogę prosić o pomoc w ustaleniu, który to silnik i jakie mogą być przyczyny?
Gdyby ktoś raczył popatrzeć w log: Log do pobrania.
Czy to silnik 2 z HEXA X z poniższego rysunku?
https://discuss.ardupilot.org/uploads/d ... 5880c6.jpg (url, bo obrazek za duży)
{kind=link}
EDIT3: Chyba doszedłem skąd jest komunikat:
"Test: Motor Balance = WARN - Motor channel averages = [1675, 1584, 1652, 1616, 1648, 1621] Average motor output = 1632 Difference between min and max motor averages = 91"
Ustawieni byliśmy zawsze w tym samym kierunku i po ucieczce z wiatrem zawsze wracaliśmy w lewo. Na wykresie widać, że C2 odstaje tylko w powrotach, nie w zawisie, ale wtedy ten silnik mniej pracuje.
- silniki1.jpg (299.58 KiB) Przejrzano 2241 razy
- silniki2.jpg (306.17 KiB) Przejrzano 2241 razy