Silniki - zostało mi po hexie osiem sztuk (miałem zapas) - Racerstar BR2216 810kv + śmigła 1038.
ESC - zostały mi z X8 - Racerstar RS30A
Rama - szukałem najmniejszej pod mój napęd, kupiłem pod nazwą Tarot LJI 380, ale widziałem ją w różnych wersjach i nazwach:
https://pl.aliexpress.com/item/LJI-380- ... 94167.html
FC - Matek F722-STD
PDB - Matek FCHUB-6S Hub
VTX - Eachine TX801
RX - FrSky X8R
Gimbal - Tarot TL3T05
Kamera - Xiaomi Action na testy, docelowo Xiaomi 4K+
Pakiety - ZOP Power 4500mAh 45C 4S
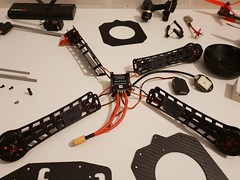
Ale od początku, najpierw przyszła rama, zamontowałem silniki. Kopter mniejszy niż śmigło w X8






Potem reszta przesyłek:



Od początku chciałem przerobić dolny CP na custom wycięty z carbonu - aby zastąpić ciężki oryginał z laminatem oraz zintegrować uchwyt gimbala. Obie płytki + mocowanie gimbala ważyło 74g. Nowe dwie płytki carbonowe ważą 64g, mają grubość 2mm (oryginał 1.5mm) i spokojnie można było je więcej "wybrać" schodząc do ok 40g.




W międzyczasie rozbroiłem X8 więc ESC przyszły do quadro. Wszytko lutowane na sztywno, tzn. bez wtyczek. ECS złapane przezroczystym termokurczem do ramienia.






Finalnie, zaprojektowałem zarówno dolne jak i górne CP. Kanapka PDB+FC nie mieściła się między pokładami więc wyciąłem również górę z większym otworem centralnym. W oczekiwaniu na wycięty carbon, wydrukowałem na drukarce 3d płytki - aby móc wszystko sprawdzić i polutować.






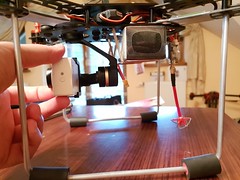
Rozstaw silników musiałem zwiększyć aby zmieścić pakiet i gimbal między śmigłami - niewiele, o 1 cm, ale zawsze. Przekątna to teraz 39cm. Pakiet zamontowany jest do CP dolnego na gumkach, na zdjęciach zwykłe recepturki, do lotu będą porządne gumy. Odbiornik z antenkami PCB zamontowany na wydrukowanym stojaczku - patent z X8. Kamera docelowo będzie Xiaomi 4k+ która wyjście AV ma na stykach USB-C - stąd wtyczki z wyprowadzonymi padami aby dało się to jakoś zlutować.





GPS najpierw miał być na maszcie, ale wymyśliłem drukowaną kopułę na cały kopter z mocowaniem GPS w środku. Scianki mają 2mm grubości, a "dach" 1mm. W międzyczasie doszedł carbon, otworów na kopółkę w nim brak, wierciłem przez wydrukowany wzornik:







Tak maszynka wygląda na gotowo. Odbiornik zamontowany od dołu, VTX podobnie, nie wiem dlaczego w X8 montowałem wszystko na górze.



Z tego jestem najbardziej zadowolony, wyszło lepiej niż zakładałem - 1,3kg:

Czas lotu - hexa na tym napędzie i pakiecie 4s5200 latała 19min przy wadze 2050g. Stąd domyślam się, że quadro 1366g z pakietem 3466mAh powinno latać tyle samo. Wagi jest trochę mniej, pakietu więcej, z proporcji wychodzi 25 minut. Nawet 20 min będzie zadawalające, ale ciekawy jestem wyniku.
Silniki z tymi śmigłam mierzyłem kiedyś na hamowni, nie pamiętam dokładnie ile mocy pobierały przy jakim ciągu, ale ciąg maksymalny był 1050g przy 15A@4S. 1300g wagi przy 4200g ciągu max to 31%, powinno latać zwinnie
Z niedoróbek
- gps jest przekręcony o kilka st, ale to raczej da się skorygować w konfiguracji iNava
- sterowanie gimbalem - przyjmuje SBUS tak jak FC więc będą na tym samym przewodzie, natomiast jedyny laptop jaki mam nie wykrywał gimbala, nie mogłem ustawić kanałów do sterowania
- w drugiej wersji carbonu będzie dużo mniej, niepotrzebnie płytki są takie duże. Gimbal raczej zamontuję inaczej, niżej - miejsca pod nogami jest sporo, jak będzie niżej, to będzie można "patrzeć" wyżej bez śmigieł w kadrze
Pierwszy lot pewnie w nadchodzący weekend, na pewno zdam relacje. Stay tuned