Wersje testowe przed oficjalnym wydaniem dostępne są tutaj (w lewym menu "download"):
http://www.bigaj.com.pl/fpvsystem/
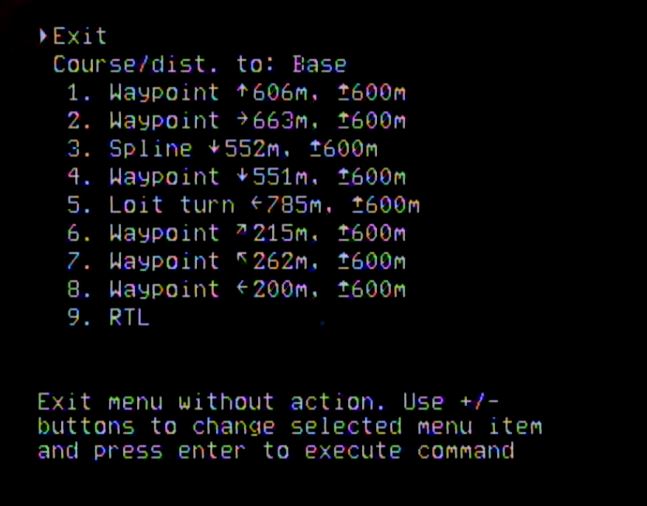
Dotychczasowi użytkownicy systemu z pewnością docenią nowe okno definiowania tras z dowolnymi wysokościami węzłów i kontrolą wysokości ponad poziomem gruntu, rozszerzony monitor kanałów RC czy możliwość nadania nazw dla layoutów (widocznych w menu OSD).
Ale najważniejsza funkcjonalność, to współpraca naszego OSD z autopilotami obsługującymi protokół MavLink (Ardupilot), np. APM czy Pixhawk. I to zarówno w trybie samolotowym jak i dla wielowirnikowców.

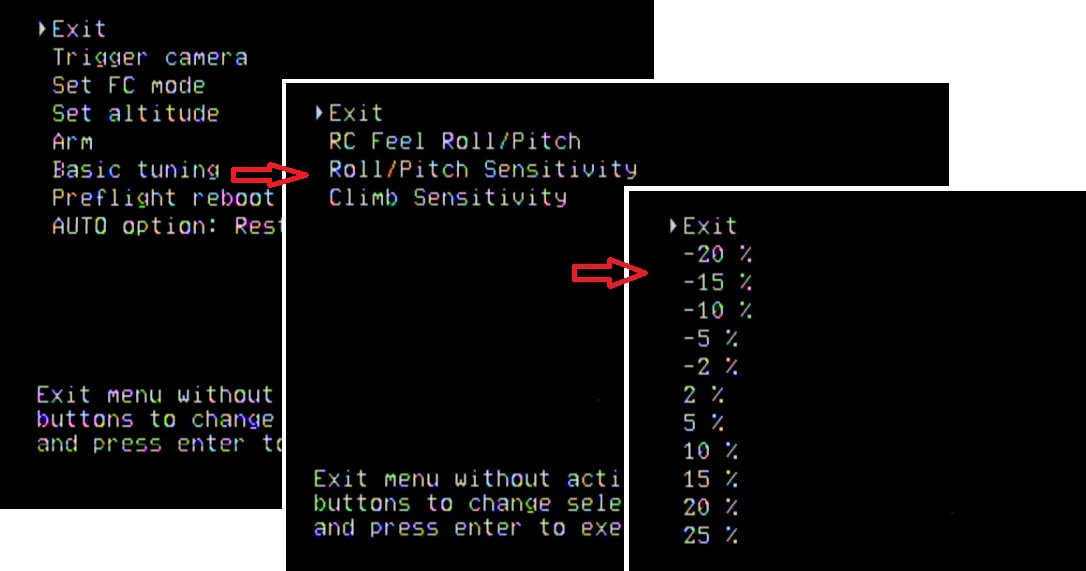
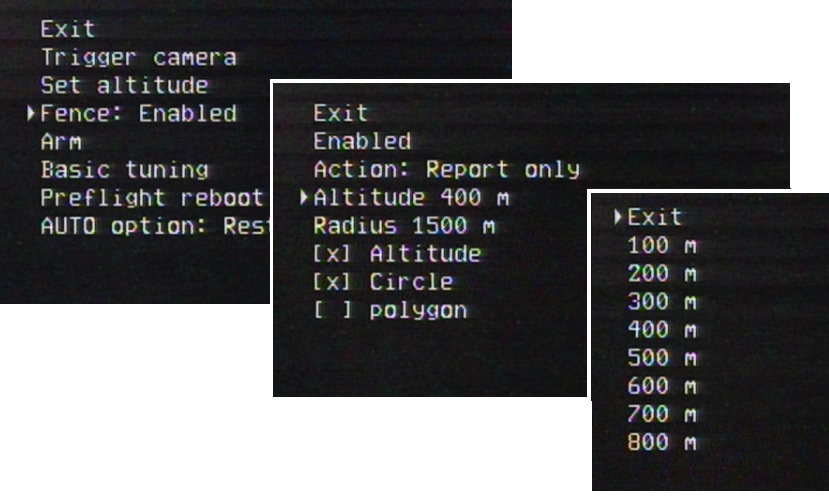
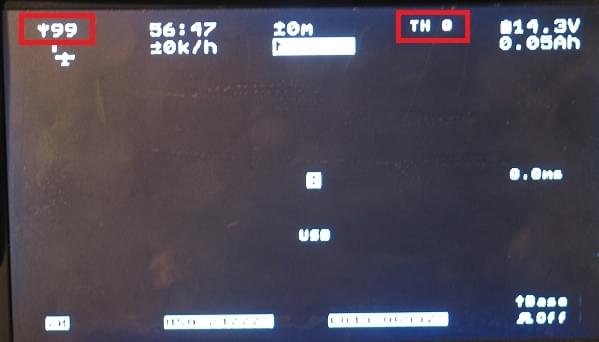
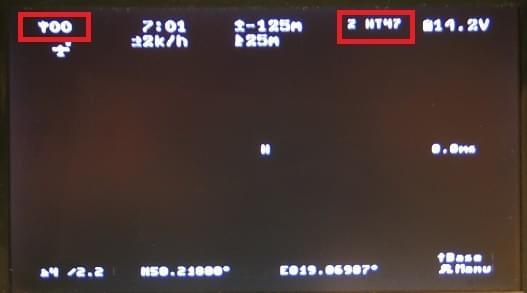
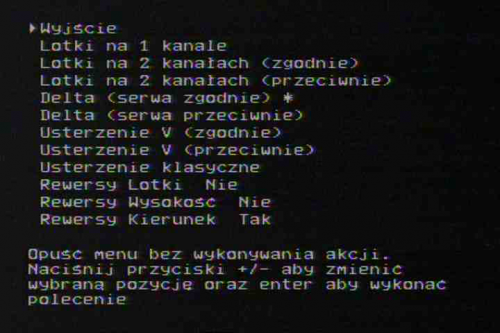
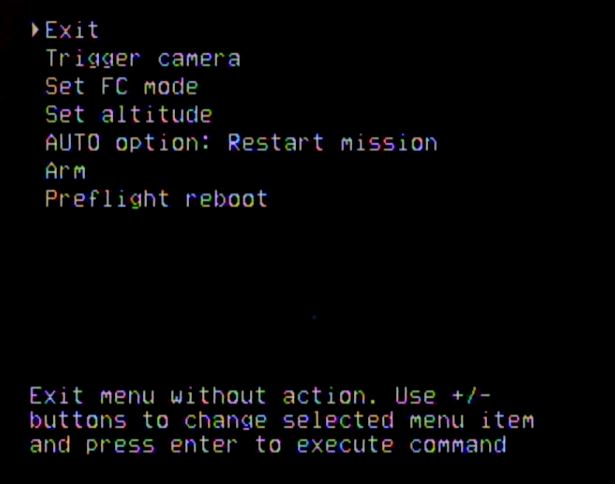
OSD nie tylko prezentuje dane z kontrolera (horyzont, kurs, stan baterii, kanałów RC itp), ale również udostępnia wiele funkcji typowych dla GCS (stacji naziemnej) - jak wybór punktów trasy, uzbrojenie/rozbrojenie, status i komunikaty systemowe, wybór dowolnego trybu lotu itd.
OSD po prostu przejmuje funkcje GCS i pozwala na komfortowe loty bez laptopa i live połączenia z GCS.
Oczywiście funkcjonalność MavLink nie jest zamknięta i nowe funkcjonalności będą się sukcesywnie pojawiać, liczę jak zwykle również na sugestie użytkowników.