
Ale piękną masz ramę! Cable managment świetny! Aż miło się patrzy :)
Chętnie bym zobaczył więcej filmików i zdjęć z powietrza.
Trzymam kciuki i czekam na aktualizacje :D
Octocopter X8 by Tanner (56k warning!)
Moderatorzy: moderatorzy2014, moderatorzy
Re: Octocopter X8 by Tanner (56k warning!)
Relacja budowy mojej hexy Tarot 800: http://rc-fpv.pl/viewtopic.php?f=27&t=36640
Re: Octocopter X8 by Tanner (56k warning!)
Saures dzięki za miłe słowa! Teraz niestety sprzęt w rozsypce, nie udało się jeszcze ani razu wystartować po zmianie na pixa, gimbal też leży z bebechami na wierzchu... Ale na wszystko przyjdzie czas :)
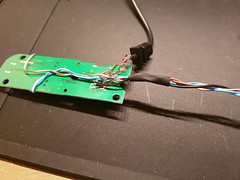
Udało mi się w końcu zrobić sterowanie aparatem, w serii RX nie ma już sterowania podczerwienią, szkoda bo storm32 ma wyjście na LED IR i działałoby bez żadnego problemu, jest za to multiterminal - 9 pinów w obudowie micro-usb, nikt nie wie jak to działa, różne modele mają różne wersje protokołu, baardzo cieżko jest nawet zamówić wtyczkę do tego. Zamówiłem na ebayu pilot Fotga RM-VS1, fajna sprawa bo ma też zoom - dużo chińskich pilotów nie ma zoomu. Kabelek jest dość długi, chyba 80 cm, pomyślę nad jego skróceniem. Pomierzyłem płytkę, sprawdziłem przejścia i okazuje się, że sterowanie odbywa sie masą - wyprowadziłem więc 4 punkty na przewodach - dwa do zoomu, jeden do video, jeden do migawki. Sterowanie odbywa się przez arduino oraz najprostsze tranzystory NPN przez rezystory 10k. Masa pilota połączona jest z masą arduino. Prosty program który przez pulseIn sprawdza wartość kanału i podaje stan wysoki na jedno z 4 wyjść. Do taranisa napisałem równie prosty LUT który na wyjściu podaję sumę z 2 wejść - przełącznika do zoomu oraz przełącznika migawki/filmowania podzieloną przez 2 - mam więc wartości -100/100 dla zoomu oraz -50/50 dla robienia zdjęcia i filmowania. Zależało mi na zoomie - aby zmieniać ogniskową bez tracenia czasu i pakietu na lądowanie/start oraz na start/stop filmowania - RX100 kręci w 4k ale niestety tylko do 5 min. Problem zupełnie znika gdy mogę włączać/wyłaczać filmowanie z aparatury :) Dodatkowo podczas filmowania prędkość zoomu brana jest z ustawień apratu, na najwolniejszym przejście od min do max trwa jakieś 10-15 sekund więc bardzo możliwe że uda się nakręcić fajne ujęcia również z takim ruchem.





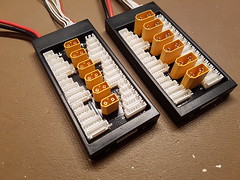
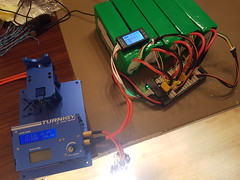
Dalej - przesiadka na XT90 - wklejałem wyżej zdjęcia pakietu 4S 16Ah który jest na XT90, w kopterze miałem dwa wejścia XT60 bo latałem na 2 mniejszych pakietach. Zaczałem od zlutowania przejściówki 2xXT60 na XT90, przy okazji również zorientowałem się o co chodzi w anti-spark wtyczkach - oczywiście nie miałem takich, parę razy podłączyłem pakiet i juz widać lekkie "przyjaranie" na stykach. Zamówiłem komplet XT90 anti-spark, myślałem, że zamontuję po stronie koptera i będzie spokój, ale rezystor jest zamontowany w gnieżdzie - po stronie pakietu - a nie we wtyczce męskiej. Muszę w takim razie zlutować je ze sobą - będzie to po prostu jedna "przelotka" zakładana na pakiet przed podłączeniem do koptera. Trafiła się okazja na 4 takie same pakiety 16Ah z której nie mogłem nie skorzystac, więc teraz mniejsze pakiety idą na sprzedaż a zostaje 5 szt. 16Ah - nie będzie trzeba już jeździć w teren z łądowarką, szacuję conajmniej 20 minut na jednym pakiecie więc zapas jest. W kopterze jest teraz jedno gniazdo XT90 na przewodach 10AWG. Wraz z dużą pojemnością pakietów, pojawił się problem rozładowywania - moja ładowarka ma 15W rozładowywania co daje max 1A przy 4S, 9-10 godzin z full do storage... Za parę złotych zamówiłem 4 oprawki i żarówki H7 - czyste 220W rozładowywania czyli jakieś 45-50 minut. Miernik na złącze balancera do rozładowywania, bo przy podłączonych żarówkach nie ma kontroli napięcia :) Płytka do ładowania równoległego na XT90 - moja ładowarka daje max 20A więc przy 5 pakietach ładowanie ze storage do full trwa trochę ponad 2h. Widać też fajny chiński uchwyt na aparat. Miałem kiedyś pojedynczą przyssawkę na gopro ale odpadła przy 100+kmph, Xiaomi Yi przeżyło, ale musiałem wymienić obiektyw. Teraz jeśli chodzi o aparat, to 3 przyssawki + sznuerk w razie czego. Głowica kulowa była bardzo kiepskiej jakości i miała luzy, dlatego wymieniłem na porządniejszą i zestaw sprawdza się wyśmienice.





Kolejna niespodzianka - konwerter HDMI na AV wystaje do góry, zasłania gniazdo multiterminal. Konieczne wyciągnięcie go na kabelku, nie chciałem lutować wtyczki HDMI, więc znowu miesiąc czekania na chińską paczkę - przedłużacz 30 cm minihdmi. Brakowało też oświetlenia ramion, były wersje zasilania przez 4S ale wziałem na 5V + BEC - mniej do roboty przy zmianie na 6S w przyszłości. Zamontuje ję standardowo na końcach ramion, przewody pójdą środkiem, będzie więc świeciło przez dolne smigła ale nie powinno przeszkadzać.



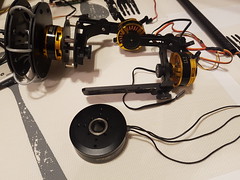
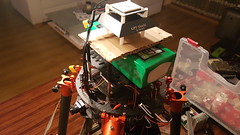
Zabrałem się w końcu za montaż sprzętu, brakowało przewodów do wiązek, w ABC-RC zamówiłem DF13 oraz przewody do nich aby nie zostać w srodku roboty z brakującym kabelkiem, wiadomo jak to jest. Zacząłem od gimbala, wymieniłem silnik yaw na większy z hollow shaft. Musiałem ręcznie wiercić otwory na śrubki w laminacie więc nie jest idealnie, ale cała dolna płyta będzie i tak do przeprojektowania jak uporam się z ważniejszymi rzeczami. Przez slip ring idzie sygnał wideo, główne zasilanie (po dwa przewody na plus i masę) mavlink do storm32 oraz sygnał do IMU które jest nad YAW. Nie wiem jeszcze jak ogarnę te kabelki aby w miarę normalnie wyglądało.






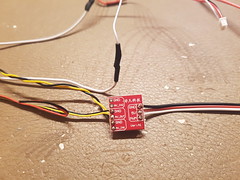
Kwesia telemetrii - modemy na 433MHz + kabel OTG do telefonu i jest prawie funckjonalność DJI :) Strasznie mi się podobała ta koncepcja, choćby ustalenia krótkiej trasy przelotu i oddanie się w całości sterowaniu kamery. Nie testowałem jeszcze, mam nadzieję, że zadziała tak jak sobie to wyobrażam. Na banggood zamówiłem też dwa układziki do podłączenia telemetrii Pixa do smart-portu FrSky - na razie tego nie montuję ale na przyszłość dobrze będzie mieć. Sygnały wideo z aparatu oraz z kamery FPV podłączone są do switcha video sterowanego jednym kanałem z aparatury - działa super, przełącza się w sekundę, o to mi chodziło. Podoba mi się rozwiązanie w Inspire - PiP czyli podgląd z fpv w rogu ekranu, ale raczej nie ma tego jak ogarnąć a kolejny ekranik już nie wejdzie. Na ostatnim foto kalibracja power module - nie miałem nigdy wcześniej pomiaru prądu i cieszę się, że w końcu się udało.








Staneło na tym, że nie wystartowałem ani razu... Kalibracja kompasu nie przechodzi, tzn. mam offsety 500+, zapewne dlatego, że gdzies przez przypadek namagnesował się kompas, a metalowe tulejki i śrubki na których jest zamontowany na pewno nie pomagają. Można wystartować w arcro ale stwierdziłem, że to bez sensu ;) Musze go rozmagnesować, pewnie użyję uciętej starej ładowarki nokii i mam nadzieję, że w końcu uda się wzbić w powietrze. Do tego czasu jeszcze jest cała kalibracja gimbala, idzie wszystko jak krew z nosa, totalny brak czasu. Do wiosny powinno się udać :)
Udało mi się w końcu zrobić sterowanie aparatem, w serii RX nie ma już sterowania podczerwienią, szkoda bo storm32 ma wyjście na LED IR i działałoby bez żadnego problemu, jest za to multiterminal - 9 pinów w obudowie micro-usb, nikt nie wie jak to działa, różne modele mają różne wersje protokołu, baardzo cieżko jest nawet zamówić wtyczkę do tego. Zamówiłem na ebayu pilot Fotga RM-VS1, fajna sprawa bo ma też zoom - dużo chińskich pilotów nie ma zoomu. Kabelek jest dość długi, chyba 80 cm, pomyślę nad jego skróceniem. Pomierzyłem płytkę, sprawdziłem przejścia i okazuje się, że sterowanie odbywa sie masą - wyprowadziłem więc 4 punkty na przewodach - dwa do zoomu, jeden do video, jeden do migawki. Sterowanie odbywa się przez arduino oraz najprostsze tranzystory NPN przez rezystory 10k. Masa pilota połączona jest z masą arduino. Prosty program który przez pulseIn sprawdza wartość kanału i podaje stan wysoki na jedno z 4 wyjść. Do taranisa napisałem równie prosty LUT który na wyjściu podaję sumę z 2 wejść - przełącznika do zoomu oraz przełącznika migawki/filmowania podzieloną przez 2 - mam więc wartości -100/100 dla zoomu oraz -50/50 dla robienia zdjęcia i filmowania. Zależało mi na zoomie - aby zmieniać ogniskową bez tracenia czasu i pakietu na lądowanie/start oraz na start/stop filmowania - RX100 kręci w 4k ale niestety tylko do 5 min. Problem zupełnie znika gdy mogę włączać/wyłaczać filmowanie z aparatury :) Dodatkowo podczas filmowania prędkość zoomu brana jest z ustawień apratu, na najwolniejszym przejście od min do max trwa jakieś 10-15 sekund więc bardzo możliwe że uda się nakręcić fajne ujęcia również z takim ruchem.
Dalej - przesiadka na XT90 - wklejałem wyżej zdjęcia pakietu 4S 16Ah który jest na XT90, w kopterze miałem dwa wejścia XT60 bo latałem na 2 mniejszych pakietach. Zaczałem od zlutowania przejściówki 2xXT60 na XT90, przy okazji również zorientowałem się o co chodzi w anti-spark wtyczkach - oczywiście nie miałem takich, parę razy podłączyłem pakiet i juz widać lekkie "przyjaranie" na stykach. Zamówiłem komplet XT90 anti-spark, myślałem, że zamontuję po stronie koptera i będzie spokój, ale rezystor jest zamontowany w gnieżdzie - po stronie pakietu - a nie we wtyczce męskiej. Muszę w takim razie zlutować je ze sobą - będzie to po prostu jedna "przelotka" zakładana na pakiet przed podłączeniem do koptera. Trafiła się okazja na 4 takie same pakiety 16Ah z której nie mogłem nie skorzystac, więc teraz mniejsze pakiety idą na sprzedaż a zostaje 5 szt. 16Ah - nie będzie trzeba już jeździć w teren z łądowarką, szacuję conajmniej 20 minut na jednym pakiecie więc zapas jest. W kopterze jest teraz jedno gniazdo XT90 na przewodach 10AWG. Wraz z dużą pojemnością pakietów, pojawił się problem rozładowywania - moja ładowarka ma 15W rozładowywania co daje max 1A przy 4S, 9-10 godzin z full do storage... Za parę złotych zamówiłem 4 oprawki i żarówki H7 - czyste 220W rozładowywania czyli jakieś 45-50 minut. Miernik na złącze balancera do rozładowywania, bo przy podłączonych żarówkach nie ma kontroli napięcia :) Płytka do ładowania równoległego na XT90 - moja ładowarka daje max 20A więc przy 5 pakietach ładowanie ze storage do full trwa trochę ponad 2h. Widać też fajny chiński uchwyt na aparat. Miałem kiedyś pojedynczą przyssawkę na gopro ale odpadła przy 100+kmph, Xiaomi Yi przeżyło, ale musiałem wymienić obiektyw. Teraz jeśli chodzi o aparat, to 3 przyssawki + sznuerk w razie czego. Głowica kulowa była bardzo kiepskiej jakości i miała luzy, dlatego wymieniłem na porządniejszą i zestaw sprawdza się wyśmienice.
Kolejna niespodzianka - konwerter HDMI na AV wystaje do góry, zasłania gniazdo multiterminal. Konieczne wyciągnięcie go na kabelku, nie chciałem lutować wtyczki HDMI, więc znowu miesiąc czekania na chińską paczkę - przedłużacz 30 cm minihdmi. Brakowało też oświetlenia ramion, były wersje zasilania przez 4S ale wziałem na 5V + BEC - mniej do roboty przy zmianie na 6S w przyszłości. Zamontuje ję standardowo na końcach ramion, przewody pójdą środkiem, będzie więc świeciło przez dolne smigła ale nie powinno przeszkadzać.
Zabrałem się w końcu za montaż sprzętu, brakowało przewodów do wiązek, w ABC-RC zamówiłem DF13 oraz przewody do nich aby nie zostać w srodku roboty z brakującym kabelkiem, wiadomo jak to jest. Zacząłem od gimbala, wymieniłem silnik yaw na większy z hollow shaft. Musiałem ręcznie wiercić otwory na śrubki w laminacie więc nie jest idealnie, ale cała dolna płyta będzie i tak do przeprojektowania jak uporam się z ważniejszymi rzeczami. Przez slip ring idzie sygnał wideo, główne zasilanie (po dwa przewody na plus i masę) mavlink do storm32 oraz sygnał do IMU które jest nad YAW. Nie wiem jeszcze jak ogarnę te kabelki aby w miarę normalnie wyglądało.
Kwesia telemetrii - modemy na 433MHz + kabel OTG do telefonu i jest prawie funckjonalność DJI :) Strasznie mi się podobała ta koncepcja, choćby ustalenia krótkiej trasy przelotu i oddanie się w całości sterowaniu kamery. Nie testowałem jeszcze, mam nadzieję, że zadziała tak jak sobie to wyobrażam. Na banggood zamówiłem też dwa układziki do podłączenia telemetrii Pixa do smart-portu FrSky - na razie tego nie montuję ale na przyszłość dobrze będzie mieć. Sygnały wideo z aparatu oraz z kamery FPV podłączone są do switcha video sterowanego jednym kanałem z aparatury - działa super, przełącza się w sekundę, o to mi chodziło. Podoba mi się rozwiązanie w Inspire - PiP czyli podgląd z fpv w rogu ekranu, ale raczej nie ma tego jak ogarnąć a kolejny ekranik już nie wejdzie. Na ostatnim foto kalibracja power module - nie miałem nigdy wcześniej pomiaru prądu i cieszę się, że w końcu się udało.
Staneło na tym, że nie wystartowałem ani razu... Kalibracja kompasu nie przechodzi, tzn. mam offsety 500+, zapewne dlatego, że gdzies przez przypadek namagnesował się kompas, a metalowe tulejki i śrubki na których jest zamontowany na pewno nie pomagają. Można wystartować w arcro ale stwierdziłem, że to bez sensu ;) Musze go rozmagnesować, pewnie użyję uciętej starej ładowarki nokii i mam nadzieję, że w końcu uda się wzbić w powietrze. Do tego czasu jeszcze jest cała kalibracja gimbala, idzie wszystko jak krew z nosa, totalny brak czasu. Do wiosny powinno się udać :)
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octocopter X8 by Tanner (56k warning!)
Boziu! Ile tu się dzieje!
Ze sterowaniem Soniacza ciekawie wymyśliłeś. My chyba jako jedyni dwaj walczymy z tym aparatem :)
Czekam na dziewiczy lot i film z nagrania w powietrzu.
PS: Fajnie się ogląda taką fotorelację z budowy. Oby ciężka praca nie poszła na marne :)
Ze sterowaniem Soniacza ciekawie wymyśliłeś. My chyba jako jedyni dwaj walczymy z tym aparatem :)
Czekam na dziewiczy lot i film z nagrania w powietrzu.
PS: Fajnie się ogląda taką fotorelację z budowy. Oby ciężka praca nie poszła na marne :)
Relacja budowy mojej hexy Tarot 800: http://rc-fpv.pl/viewtopic.php?f=27&t=36640
Re: Octocopter X8 by Tanner (56k warning!)
Właśnie ciekawe, bo aparat ma naprawdę super jakość obrazu, nagrywa w 4k@30fps i 1080@120fps, kosztuje mniej niż więksi bracia a do tego waży 300g. Następny krok to juz chyba A6300/A6500 które są dużo cięższe, ale wtedy brałbym raczej blackmagic micro cinema camera - wymienna optyka, nagrywanie RAW 520 Mbit, możliwość sterowania wszystkim - ISO, WB, zoom, focus, video, foto - przez SBUS lub kilka sztuk PWM. Ale to już melodia przyszłości, teraz aparat długo nie będzie wąskim gardłem, raczej niestety umiejętności będą ;)
Na fotkach fajnie wygląda, ale idzie baardzo wolno, w poprzednim poście była aktualizacja z ostatnich 3 miesięcy... :)
Podłączyłem żarówki - dają radę, grzeją się strasznie, jakiś uchwyt i wiatrak dołożę kiedyś, ale 270W ciągną elegancko.
Na fotkach fajnie wygląda, ale idzie baardzo wolno, w poprzednim poście była aktualizacja z ostatnich 3 miesięcy... :)
Podłączyłem żarówki - dają radę, grzeją się strasznie, jakiś uchwyt i wiatrak dołożę kiedyś, ale 270W ciągną elegancko.
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octocopter X8 by Tanner (56k warning!)
Jest postęp! Przyszło parę paczek, z ciekawszych rzeczy to zestaw wkrętaków Xiaomi - polecam, naprawdę fajna jakość, aluminiowa obudowa. Brakuje o rozmiar mniejszego imbusa, dobieram z bliźniaczego zestawu, ale mimo wszystko jestem zadowolony. Wyważarka Du-bro - najprawdopodobniej będę wracał w carbonowych śmigieł, możliwe że jeszcze większe wymiary więc przyda się na pewno. Robi wrażenie, tak jak wszędzie piszą - chyba tylko ona ma sens. Stożki mają ślady po wyważaniu, zatrzymują się w każdej pozycji. Znalazłem na allegro fajnego sprzedawcę, który ma w ofercie wszystkie śrubki, nakrętki i słupki jakie potrzebowałem, nie tylko do koptera, więc zamówiłem wszystko co potrzeba.







Miałem problemy z kompasem, kalibracja pokazywała offsety 500-600, nie było to akceptowalne. GPS leżał w moich gratach conajmniej pół roku przed montażem, wszystko wskazywało na to, że jest namagnesowany. Mamy tu na forum temat z fajnym wyjaśnieniem, znalazłem starą ładowarkę do komórki, w nowych transformatory były bardzo malutkie, kątówką otworzyłem rdzeń i wyrzuciłem uzwojenie wtórne. Takim wynalazkiem wystarczyło pomachać przy GPSsie, profilaktycznie też rozmagnesowałem samego Pixhawka i efekty od razu lepsze - offsety jak na zdjęciu. Postanowiłem przenieść GPS z masztu na ramieniu - raz, że razem ze shieldem nie jest lekki i masz był "elastyczny", dwa że ramię jest pod kątem i nie mam pewności czy to zdrowe rozwiązanie. Aby uniknąć problemów z magnesowaniem, wymieniłem słupki na plastikowe - między górnym CP a pokładem pakietu jest metalowy 50mm, natomiast wyżej już wszystko plastikowe, razem ze wszystkim śrubkami. Na próbę pokład GPSu wyciąłem z kartonu, potem do lotu z HDFu 3mm, a docelowo będzie oczywiście z laminatu G10 1mm. Przy okazji przeprojektuję półkę pod pakiet, abym mógł mocować go dwoma opaskami po bokach a nie jedną na środku. Zabrałem się też za oświetlenie, ledy świecą bardzo jasno, ustawiłem czerwone i zielone, ale jeden microprzełącznik nie styka i led miga przy każdym dotknięciu, będę musiał poprawić luty.








Był też problem z telemetrią na 433Mhz - strasznie sieje, gdy jest wpięta, gps nie łapie fixa oraz warstwa OSD miga na ekranie, wszystkie problemy ustają po wypięciu jej z Pixhawka... Muszę do tego wrócić, bo bardzo mi na niej zależało. W każdym razie - po wszystkich kalibracjach w końcu udało się uzbroić i wystartować. Za pierwszym razem parę minut w alt-hold, GPS nie łapał przez telemetrię, nie zrobiłem sobie też reverse pitch i musiałem się pilnowac. Drugi start już z dobrze działającym drążkiem oraz trybem loiter - szok jak idealnie trzyma pozycje! Fix na 19 satelit, jestem pod wrażeniem... Pogoda nie pozwoliła na więcej lotów, bo w niedzielę padał już śnieg bez przerwy. Nagrałem krótki filmik z pierwszego zwisu w loiterze.
Za 2 tygodnie kolejny weekend "zaklepany" na robienie z kopterem, mam nadzieję odpalić gimbal i skonfigurować jego sterowanie przez FC. Zamówiłem trochę drobnicy do podwozia, montażu pakietu itd, więc przyjdą do tego czasu, wziąłem też dwa silniki i nowe śmigła na próbę - możliwe, że uda się wycisnąć lepszą wydajność i przy okazji sporą redukcję wagi, będę raportował o wynikach :)
Miałem problemy z kompasem, kalibracja pokazywała offsety 500-600, nie było to akceptowalne. GPS leżał w moich gratach conajmniej pół roku przed montażem, wszystko wskazywało na to, że jest namagnesowany. Mamy tu na forum temat z fajnym wyjaśnieniem, znalazłem starą ładowarkę do komórki, w nowych transformatory były bardzo malutkie, kątówką otworzyłem rdzeń i wyrzuciłem uzwojenie wtórne. Takim wynalazkiem wystarczyło pomachać przy GPSsie, profilaktycznie też rozmagnesowałem samego Pixhawka i efekty od razu lepsze - offsety jak na zdjęciu. Postanowiłem przenieść GPS z masztu na ramieniu - raz, że razem ze shieldem nie jest lekki i masz był "elastyczny", dwa że ramię jest pod kątem i nie mam pewności czy to zdrowe rozwiązanie. Aby uniknąć problemów z magnesowaniem, wymieniłem słupki na plastikowe - między górnym CP a pokładem pakietu jest metalowy 50mm, natomiast wyżej już wszystko plastikowe, razem ze wszystkim śrubkami. Na próbę pokład GPSu wyciąłem z kartonu, potem do lotu z HDFu 3mm, a docelowo będzie oczywiście z laminatu G10 1mm. Przy okazji przeprojektuję półkę pod pakiet, abym mógł mocować go dwoma opaskami po bokach a nie jedną na środku. Zabrałem się też za oświetlenie, ledy świecą bardzo jasno, ustawiłem czerwone i zielone, ale jeden microprzełącznik nie styka i led miga przy każdym dotknięciu, będę musiał poprawić luty.
Był też problem z telemetrią na 433Mhz - strasznie sieje, gdy jest wpięta, gps nie łapie fixa oraz warstwa OSD miga na ekranie, wszystkie problemy ustają po wypięciu jej z Pixhawka... Muszę do tego wrócić, bo bardzo mi na niej zależało. W każdym razie - po wszystkich kalibracjach w końcu udało się uzbroić i wystartować. Za pierwszym razem parę minut w alt-hold, GPS nie łapał przez telemetrię, nie zrobiłem sobie też reverse pitch i musiałem się pilnowac. Drugi start już z dobrze działającym drążkiem oraz trybem loiter - szok jak idealnie trzyma pozycje! Fix na 19 satelit, jestem pod wrażeniem... Pogoda nie pozwoliła na więcej lotów, bo w niedzielę padał już śnieg bez przerwy. Nagrałem krótki filmik z pierwszego zwisu w loiterze.
Za 2 tygodnie kolejny weekend "zaklepany" na robienie z kopterem, mam nadzieję odpalić gimbal i skonfigurować jego sterowanie przez FC. Zamówiłem trochę drobnicy do podwozia, montażu pakietu itd, więc przyjdą do tego czasu, wziąłem też dwa silniki i nowe śmigła na próbę - możliwe, że uda się wycisnąć lepszą wydajność i przy okazji sporą redukcję wagi, będę raportował o wynikach :)
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octocopter X8 by Tanner (56k warning!)
No nareszcie nowy odcinek! :D
Mega wkrętaki! Też sobie zakupię bo szwagier też je ma i jakość wykonania robi wrażenie.
Nie zastanawiałeś się nad składanymi śmigłami?
Mam tą samą wyważarkę tylko pod marką Turingy.
Kradnę nazwę firmy gdzie zrobiłeś zakupy.
Świetnie, że problem z GPS został rozwiązany. Elegancko wisi w powietrzu :)
Czyli za 2 tygodnie następny odcinek. Czekam!
Mega wkrętaki! Też sobie zakupię bo szwagier też je ma i jakość wykonania robi wrażenie.
Nie zastanawiałeś się nad składanymi śmigłami?
Mam tą samą wyważarkę tylko pod marką Turingy.
Kradnę nazwę firmy gdzie zrobiłeś zakupy.
Świetnie, że problem z GPS został rozwiązany. Elegancko wisi w powietrzu :)
Czyli za 2 tygodnie następny odcinek. Czekam!
Relacja budowy mojej hexy Tarot 800: http://rc-fpv.pl/viewtopic.php?f=27&t=36640
Re: Octocopter X8 by Tanner (56k warning!)
Wiesz co, chciałbym składane śmigła, ale te które mi się podobają, tj taroty 17,5" lub 19,5" kosztują po $79 i $89 za parę, robią się koszty, a jeszcze nie jestem pewny finalnego napędu, tzn. ciągle coś zmieniam i obawiam się, że jeszcze nie czas na takie :) Skrzynie zbudowałem tak, aby nie musieć demontować śmigieł do transportu i jest ok, ale zamówiłem niedawno quick releasy z tarota - takie małe po $2, więc może one rozwiążą problem, wtedy przebuduję skrzynie na bardziej kompaktowe rozmiary bo obecnie to średnia lodówka :) Będę testował śmigła 20" na nowych silnikach 340kv które z założenia są na 6S do śmigieł 17-18". Przetestuję też czy jest jakiś zysk na moich silnikach ze 20" śmigła na dole, góra ma 18". Jeśli oba testy dadzą dobre wyniki, tzn. nowe silniki będą fajnie pracować na 20" oraz przekonam się, że dolne większe śmigło ma sens, to zamówię parkę 22" i zrobię finalny test takiego setupu na nowych silnikach. W tym przypadku nawet wolę nie wiedzieć ile kosztują składane dobre 20" i 22" śmigła :D widziałem 21,5" KDE za $140-$150 za parę... :)
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octocopter X8 by Tanner (56k warning!)
Tylko jak masz ESC bez możliwości wyłączenia hamulca to lipa. Ja mam ESC z BLHeli-S i w tej wersji hamulca wyłączyć nie mogłem, na szczęście dostałem śmigłem płasko w czoło.Tanner pisze:ale zamówiłem niedawno quick releasy z tarota -

Re: Octocopter X8 by Tanner (56k warning!)
Fantastyczna konstrukcja. Nic dodać nic ująć. W porównaniu do tego mój to "gotowiec" choć i tak w stosunku do pierwotnych założeń została mi w zasadzie sama rama TAROT:)
Andżeju to weźmiemy z mojego wozu i damy tobie.
Polatuję: SYMA X5C, Parrot BeeBooop 1 drone, DJI Phantom 3, TAROT t960 (BMW) ciągle w fazie budowy, gimbale: H3-3D, Polatucha.
Polatuję: SYMA X5C, Parrot BeeBooop 1 drone, DJI Phantom 3, TAROT t960 (BMW) ciągle w fazie budowy, gimbale: H3-3D, Polatucha.
Re: Octocopter X8 by Tanner (56k warning!)
Lech55, masz rację, pamiętam jak wylądowaniu po pierwszym starcie, jeszcze na 10" śmigłach, jedno z dolnych po prostu spadło... nakrętka się odkręciła przez te testowe 30 sekund zwisu, dobrze, że nie próbowałem więcej. Chyba mam programator, poczytam i spróbuję czy da się wyłączyć.
Tesla242, dzięki! Ciągle wszystko jeszcze jest w rozsypce po przesiadce na pixa, pewnie jeszcze kilka miesięcy minie zanim wszystko będzie gotowe na tiptop :)
Tesla242, dzięki! Ciągle wszystko jeszcze jest w rozsypce po przesiadce na pixa, pewnie jeszcze kilka miesięcy minie zanim wszystko będzie gotowe na tiptop :)
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octocopter X8 by Tanner (56k warning!)
Widzę, ze użyłeś tej fajniusiej wyważareczki made in USA :) Niedługo takową nabędę ale pytanie jest następujące: jak sobie poradzić ze śmigłami o większej średnicy? U mnie np są 17" - chodzi mi o takie ustawienie osi tej wyważarki, żeby śmigło było na zewnątrz i można je było "ważyć" w położeniu pionowym jak i poziomym? Innymi słowy jak ustawić te roleczki trzymające oś aby ta oś była idealnie w poziomie? Tam są takie śrubki regulacyjne do regulacji wysokości i da się ustawić tak aby duże śmigła tez dało się "ważyć" - tylko jak to zrobić dokładnie?
Andżeju to weźmiemy z mojego wozu i damy tobie.
Polatuję: SYMA X5C, Parrot BeeBooop 1 drone, DJI Phantom 3, TAROT t960 (BMW) ciągle w fazie budowy, gimbale: H3-3D, Polatucha.
Polatuję: SYMA X5C, Parrot BeeBooop 1 drone, DJI Phantom 3, TAROT t960 (BMW) ciągle w fazie budowy, gimbale: H3-3D, Polatucha.
Re: Octocopter X8 by Tanner (56k warning!)
Nie sądzisz, ze większe smiglo powinno byc u góry?Tanner pisze:Jeśli oba testy dadzą dobre wyniki, tzn. nowe silniki będą fajnie pracować na 20" oraz przekonam się, że dolne większe śmigło ma sens, to zamówię parkę 22"
Moze się mylę, ale najczęściej większe smiglo kreci sie wolniej, a mniejsze szybciej - w ukladzie szybsza struga z gornego małego śmigła bedzie się odbijała od dolnego ktore krecie sie wolniej.
W odwrotnym przypadku wolniejsza struga w góry zostaje przyspieszona smiglem z dołu, a "brakujące" powietrze mniejsze smiglo zasysalo by bokiem, w skutek czego powstal by jaki taki lej u gory szeroki, zwezajacy się ku dołowi.
Teoretyzuję, ale zobacz na silnik odrzutowy, na wlocie masz dużą średnicę, a następnie coraz mniejsze.
Re: Octocopter X8 by Tanner (56k warning!)
Przetrzepałem sporo internetu i co kopter/osoba to inna opinia 
Ja wyszedłem z teorii, że dolne śmigło obecnie kręci się dużo szybciej i ma dużo mniejsze obciążenie - bo pracuje w mocnej strudze powietrza z górnego. Patrzyłem w logach pixa na wyjścia ESC i kontroler podaje takie same wartości pwm na silnik górny i dolny. Stąd wnioskuję, że np w przypadku gdy ramię pobiera 200W mocy, powiedzmy 130W bierze górny silnik a 70W dolny - będę to mierzył, udostępnię wyniki. Po zmianie na większe śmigło na dole będzie ono "zbierało" więcej powietrza - spoza strugi z górnego - więc przy tym samym poziomie przepustnicy całe ramie będzie miało większy ciąg - a przy okazji pobór mocy, np 230W. Ale wtedy schodzimy przepustnicą w dól aby otrzymać ten sam ciąg i wierzę, że pobierana moc będzie mniejsza niż wyjściowe 200W.
Tyle z mojej teorii, nie mam jeszcze nic na jej poparcie, ale właśnie dlatego kupiłem tylko dwa nowe śmigła. Zbuduję z dwóch kantówek stanowisko do pomiaru ciągu całego ramienia - wtedy też dużo łatwiej będzie mierzyć wpływ zmian. Waga, dwa mierniki mocy, oba esc podłączone do jednego testera serw.
Ja wyszedłem z teorii, że dolne śmigło obecnie kręci się dużo szybciej i ma dużo mniejsze obciążenie - bo pracuje w mocnej strudze powietrza z górnego. Patrzyłem w logach pixa na wyjścia ESC i kontroler podaje takie same wartości pwm na silnik górny i dolny. Stąd wnioskuję, że np w przypadku gdy ramię pobiera 200W mocy, powiedzmy 130W bierze górny silnik a 70W dolny - będę to mierzył, udostępnię wyniki. Po zmianie na większe śmigło na dole będzie ono "zbierało" więcej powietrza - spoza strugi z górnego - więc przy tym samym poziomie przepustnicy całe ramie będzie miało większy ciąg - a przy okazji pobór mocy, np 230W. Ale wtedy schodzimy przepustnicą w dól aby otrzymać ten sam ciąg i wierzę, że pobierana moc będzie mniejsza niż wyjściowe 200W.
Tyle z mojej teorii, nie mam jeszcze nic na jej poparcie, ale właśnie dlatego kupiłem tylko dwa nowe śmigła. Zbuduję z dwóch kantówek stanowisko do pomiaru ciągu całego ramienia - wtedy też dużo łatwiej będzie mierzyć wpływ zmian. Waga, dwa mierniki mocy, oba esc podłączone do jednego testera serw.
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Re: Octocopter X8 by Tanner (56k warning!)
Tanner, jestem mega ciekaw jak wyjdzie porównanie, bo sam teoretyzuję w tej kwestii.... - tak mi się wydaje jak napisałem - ziekawy też jestem jak będzie ze sterownością - czy jeden system będzie różnił się od drugiego.
z tymi mocami to ciekawe ciekawe ;) a silnki masz identyczne, czy różniące się KV ?
z tymi mocami to ciekawe ciekawe ;) a silnki masz identyczne, czy różniące się KV ?
Re: Octocopter X8 by Tanner (56k warning!)
Oba takie same, narazie nie brałem pod uwagę różnych silników góra/dół. Myślę, że to daje podobne efekty jak zabawa ze śmigłami, no ale okaże się. Odnośnie KV - podrzuciłeś mi pomysł - zlutuję dwa mierniki obrotów na fotodiodzie do arduino, przecież to raptem parę elementów a na pewno warto mieć podgląd na obroty podczas pomiarów.
EDIT. https://groups.google.com/forum/#!topic ... NkHxp846KA tutaj ktoś robił pomiary - śmigła 10" i 11", biorąc z tabelki to co mnie interesuje, czyli to samo nachylenie, a większa średnica (co tak naprawdę zmniejsza kąt łopat ) dolnego śmigła - w załączniku - wychodzi, że przy 3S mamy wydajność +20%, przy 4S wydajność +5%. Nie mam pojęcia jakie silniki itd, ale różnica pewnie wynika z tego, że przy 4S silniki dają z siebie wszystko i kombinacja ze śmigłami nie wiele daje. Zobaczymy jak będzie u mnie, jeśli bliżej tych 5% to trochę szkoda zachodu z kombinacjami, ale zakres 10-20% byłby cudowny, chociaż na razie na nic takiego nie liczę, większe nadzieje wiążę z nowymi silnikami :)
) dolnego śmigła - w załączniku - wychodzi, że przy 3S mamy wydajność +20%, przy 4S wydajność +5%. Nie mam pojęcia jakie silniki itd, ale różnica pewnie wynika z tego, że przy 4S silniki dają z siebie wszystko i kombinacja ze śmigłami nie wiele daje. Zobaczymy jak będzie u mnie, jeśli bliżej tych 5% to trochę szkoda zachodu z kombinacjami, ale zakres 10-20% byłby cudowny, chociaż na razie na nic takiego nie liczę, większe nadzieje wiążę z nowymi silnikami :)
EDIT. https://groups.google.com/forum/#!topic ... NkHxp846KA tutaj ktoś robił pomiary - śmigła 10" i 11", biorąc z tabelki to co mnie interesuje, czyli to samo nachylenie, a większa średnica (co tak naprawdę zmniejsza kąt łopat
- Załączniki
-
- Zrzut ekranu 2018-02-01 o 17.12.48.png (48.34 KiB) Przejrzano 3244 razy
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S