Generalnie co tu pisać... działa
Podłączamy wszystko jak w starych KFC, czyli motor, lotka, lotka... nie ma na drugim kanale drugiego silnika... bo szkoda kanału na niego i zrobiłem aby PWM2 był już od drugiego dla lotek itp. Dlatego oznaczenia w GUI nie pasują do opisu na ich obrazkach. Ale oni w GUI i tak mają pomieszane bo jedna zakładka numeruje serwa od 0 a druga od 1... Tak czy siak da się połapać... Reasumując podłączenie zostawiamy jak było, wybieramy mixer jaki ma być lub piszemy własny bo tu można i tyle.
Na zakładce serwa konfigurujemy sobie reversy, midpointy itp. Przy czym pierwsze dwa serwa w GUI to jest bodaj gimbal, potem coś jeszcze i trzecie chyba to jest pierwsza lotka...
Jak już macha jak trzeba to sobie zaptaszkowujemy auxy itp. Pamiętamy o włączeniu PWM_OUTPUT_ENABLE na zakładce konfiguracja po prawej u góry i zaznaczeniu MOTOR_STOP.
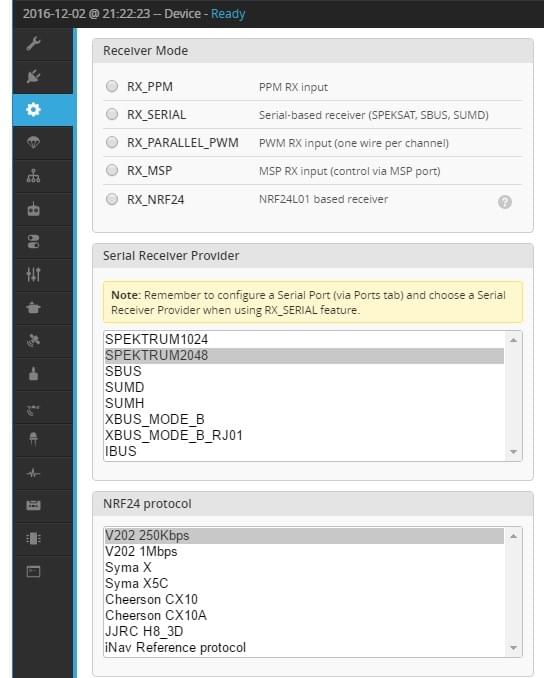
Z pidów to jedyne co zalecam to podmienić to dać więcej P dla Level do 40, oraz P dla navR dałem 30. W konsoli ustawiamy sobie eleresa po staremu:
Kod: Zaznacz cały
feature rx_eleres
save
eleres_bind
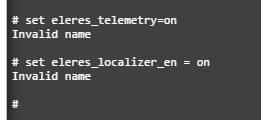
set eleres_telemetry=on
set eleres_localizer_en = on
save
Potem pierwszy lot i testujemy sobie passthru przestaiamy trymerami itp. potem lądujemy w passthru i przepisujemy położenia serw do pidpoint, potem znów centrujemy w apce i kolejny lot powinno być ok. Ważna uwaga... nawet jak mamy lekko zwichrowane lotki w passthru to startujemy w ACRO... ono wybacza duuuuzo. łatwy start idealny lot... a potem włączamy passthru i widzimy jak model jest roztrojony
Jak już wszystko śmiga to podłączamy komórkę malujemy trasę i go!
Niestety nadal horyzont potrafi czasami lekko uciec ale znacznie, znacznie mniej.
Tutaj fajną przygodę miałem dzisiaj bo ekran komórki mały i mi się namalowało ładnych pare km... i po 8km na wysokości przelotowej 60m przerwałem misję
Drugi test już patrzyłem bardziej na odległości i wyszła trasa do najdalszego punktu 4,5km i lot wzdłuż rzeki i powrót do domku, trzy punkty które jasno widać na mapce zassanej z taranisa