
Samo latanie kopterem nie jest dla mnie jakimś wyzwaniem, ale docelowo chcę latać "patrząc" z pokładu modelu. Ale to na inny wątek. Dodatkowym tematem do wykonania "po drodze" było stabilizowanie kamery nagrywającej film na pokładzie - w tej roli GoPro 3 Black Edition.
Zanim zacznę opis dodam jeszcze jedno wyjaśnienie. Dlaczego nie kupiłem gotowego gimbala? Bo gotowce są CHOLERNIE drogie.
Gotowe gimbale wyglądają i owszem ładnie, ale kosztują 250..600 USD!!! Samemu można się zmieścić w okolicy 100-120 USD. Wystarczy?

Poza tym chciałem "pobawić się" po swojemu, poznając po drodze budowę, zasadę działania, programowanie kontrolera, no i co najważniejsze - dostosować go do posiadanego modelu. W pokazanym powyżej gimbalu może też wystąpić problem wibracji przy większych prędkościach, ponieważ kamera jest zawieszona w osi ROLL tylko z jednej strony na silniku.


Zacząłem szperać po forach. No jasne że można, po to są tzw. gimbale czyli ruchome zawieszenie kamery pozwalające na stabilizację w 1..3 osiach. Tyle że klasyczne gimbale są napędzane serwami, a to było dla mnie za mało stabilne i wydajne. No i w końcu pojawił się temat specjalnych silników bezszczotkowych przystosowanych specjalnie do gimbali. Dlaczego trzeba je przystosować?

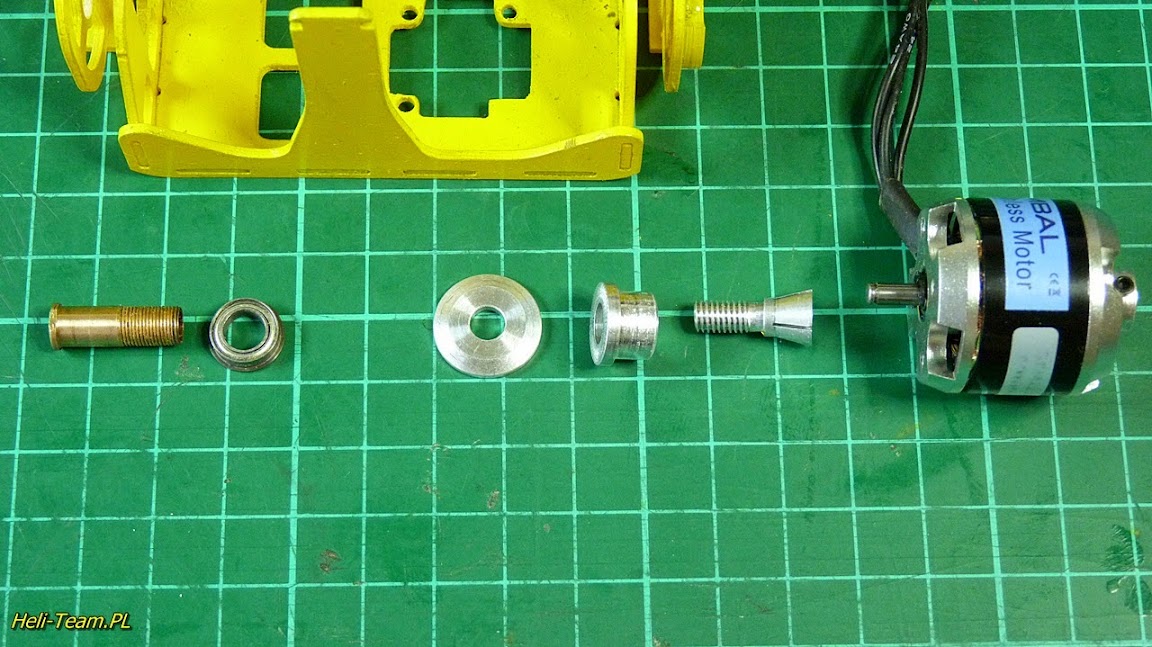
Normalny silnik ma uzwojenie wykonane z grubszego drutu i w przypadku zatrzymania silnika prąd płynący w obwodzie może je normalnie spalić. Dlatego silniki do gimbala muszą mieć znacznie cieńszy drut, ale za to więcej uzwojenia. Dzięki temu pracują praktycznie jak krokowe - analogicznie do serw - ale za to szybciej, precyzyjniej i mocniej. Na szczęście na rynku pojawiły się gotowe silniki tylko dla gimbali.
Ja kupiłem swoje w sklepie Radio-modele.pl. Cena 118 zł za sztukę.

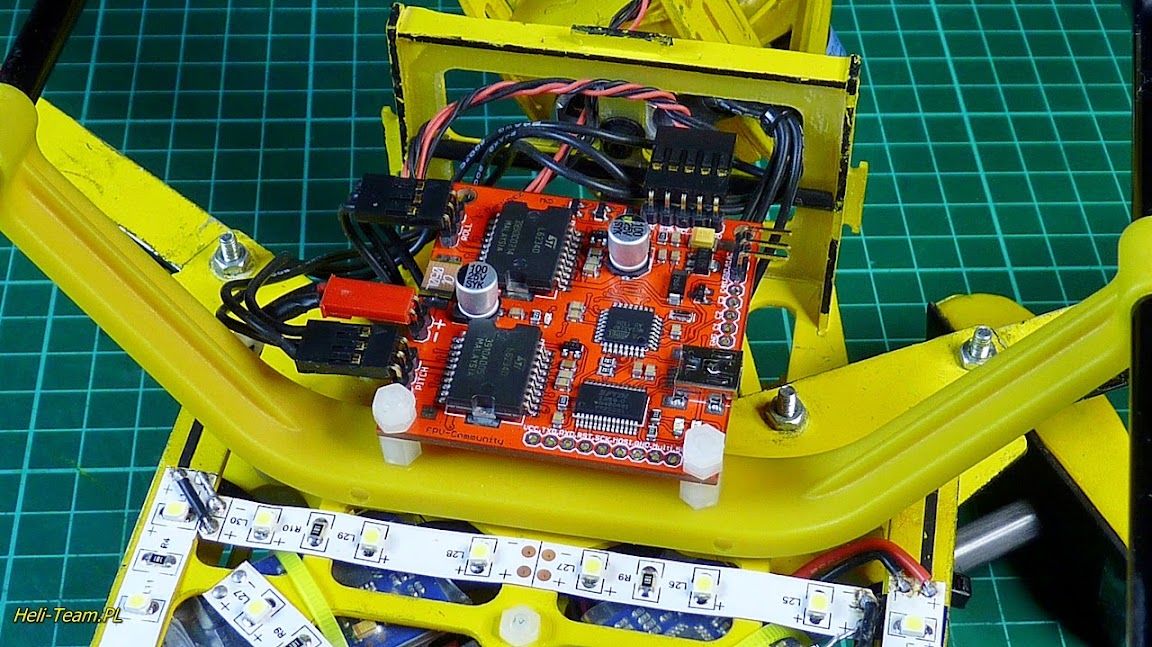
W tym samym miejscu dostałem kompletny sterownik Brushless Gimbal Controller by Martinez v.3 (komputer pokładowy sterujący pracą silników) wraz z czujnikiem pozycji. Cena ok. 250 zł.

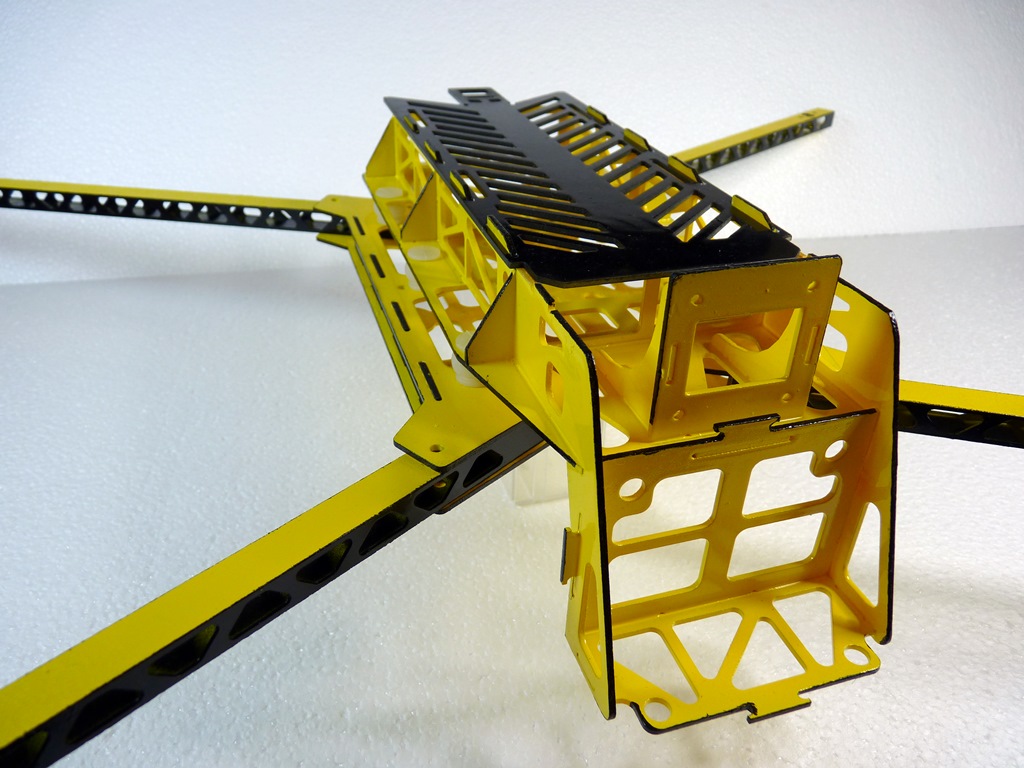
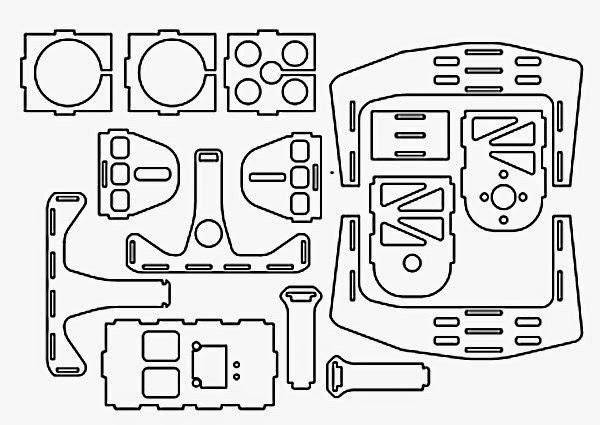
Do szczęścia brakuje jeszcze gimbala. Skorzystałem z projektu wykonanego przez kolegę Marbalona na forum rc-fpv.pl, a kolejny uczestnik, "etatowy" Rayford wyciął mi go z białego laminatu bez miedzi.
Po wstępnym złożeniu i dopasowaniu części przyszła pora na malowanie. Ponieważ model mam w kolorze żółtym z czarnymi akcentami, tak samo został pomalowany gimbal. Części malowałem oddzielnie, potem oczyściłem miejsca łączeń i skleiłem żywicą epoxy.
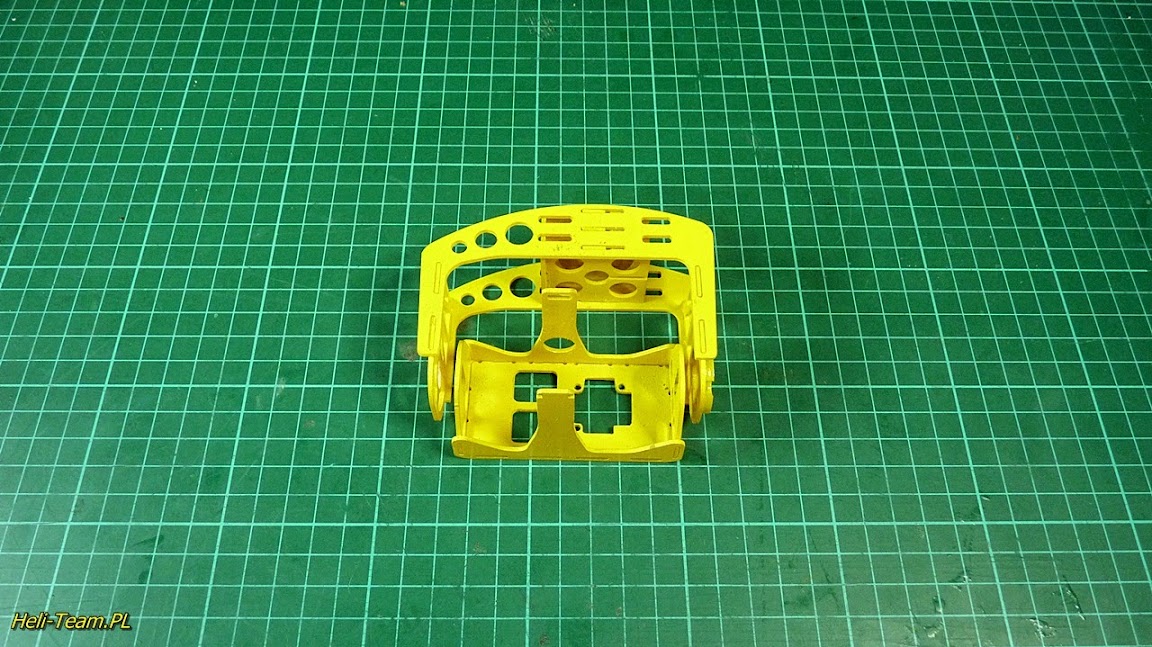
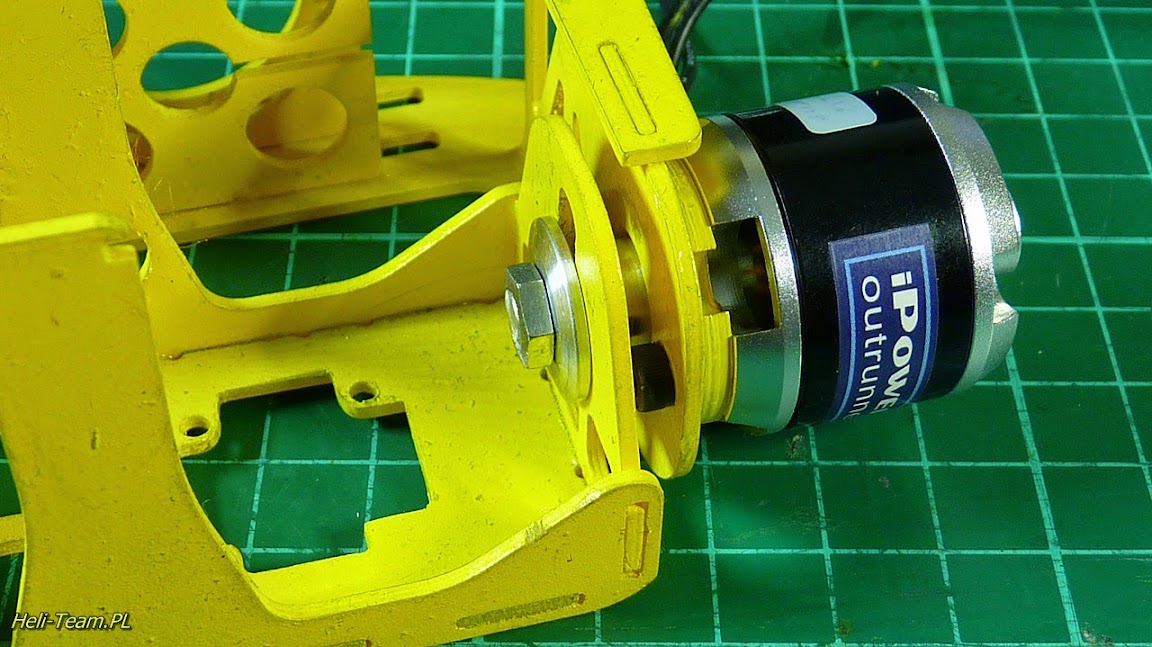
Część główna. Z tyłu znajdują się trzy wręgi, w które wsuwamy silnik przechylenia ROLL. Takie mocowanie w zupełności wystarcza. Silnik będzie potem przykręcony do wręgi modelu. Boczne wręgi posiadają podłużne otwory do regulacji wysokości koszyka z aparatem, dzięki temu będziemy mogli go precyzyjnie wyważyć. lewa boczna wręga ma doklejone podkładki, aby dopasować silnik do nasuwanego mocowania śmigła. W ten sposób koszyk będzie się trzymał silnika.





Koszyk na kamerę. Na dnie został wycięty otwór dla czujnika. Ponieważ nie każdy software ma odwracanie osi czujników przerobiłem otwór tak, aby zamocować go otworami do przodu (tak jest w niemieckim software).

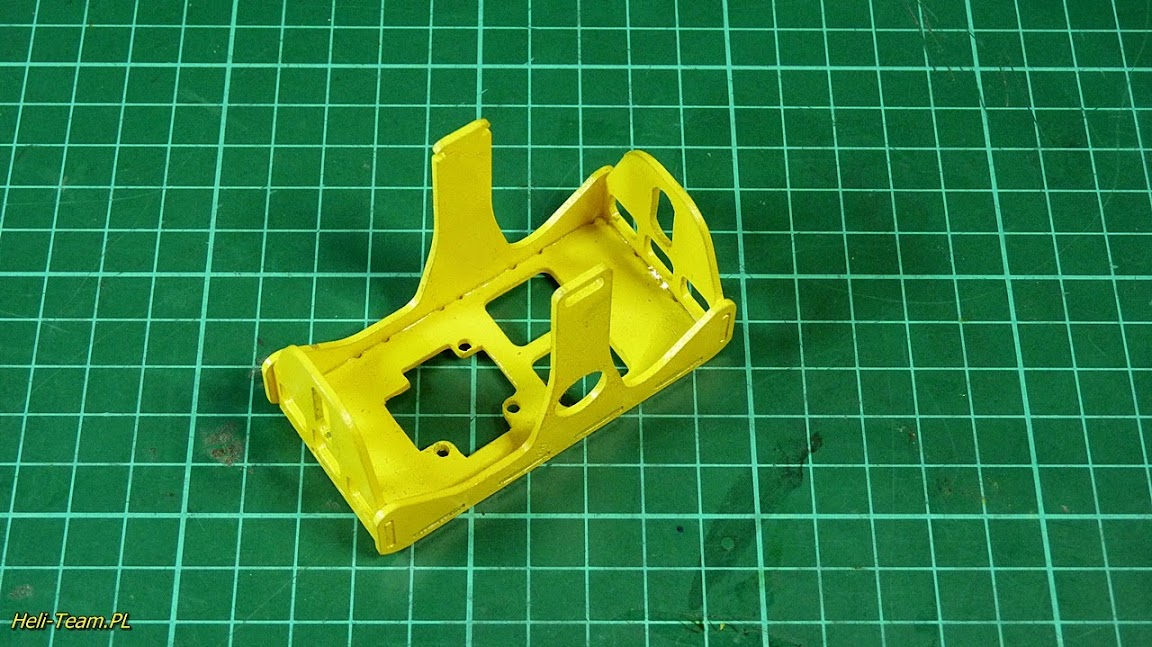


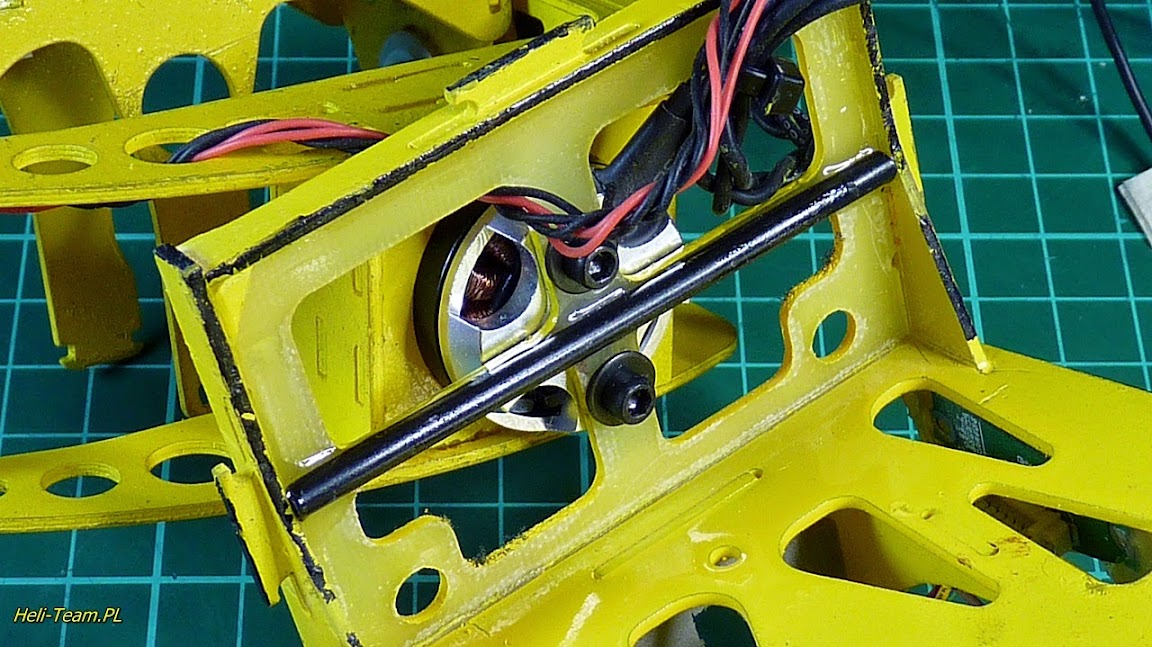
Przewody czujnika to dosyć krytyczny punkt konstrukcji. Wiele osób wiesza je luźno z zapasem na pochylenia. Ja postanowiłem zrobić zawieszenie przelotowe. Dzięki temu przewody obracają się tylko nieznacznie w osi nie stwarzając przy tym dodatkowego oporu. Tak mają zrobione profesjonalne gimbale. Ale z czego to zrobić w domowych warunkach bez obrabiarek? Heh, pogrzebałem w szufladach i znalazłem gwintowaną tuleję ślizgacza wirnika ogonowego z helikoptera. Z kolei od strony silnika koszyk będzie mocowany na wspomnianym aluminiowym mocowaniu śmigła. Po złożeniu ośka i nakrętka zostały zeszlifowane aby uzyskać jak najwięcej wolnego miejsca. Koszyk jest wykonany prawie na styk.



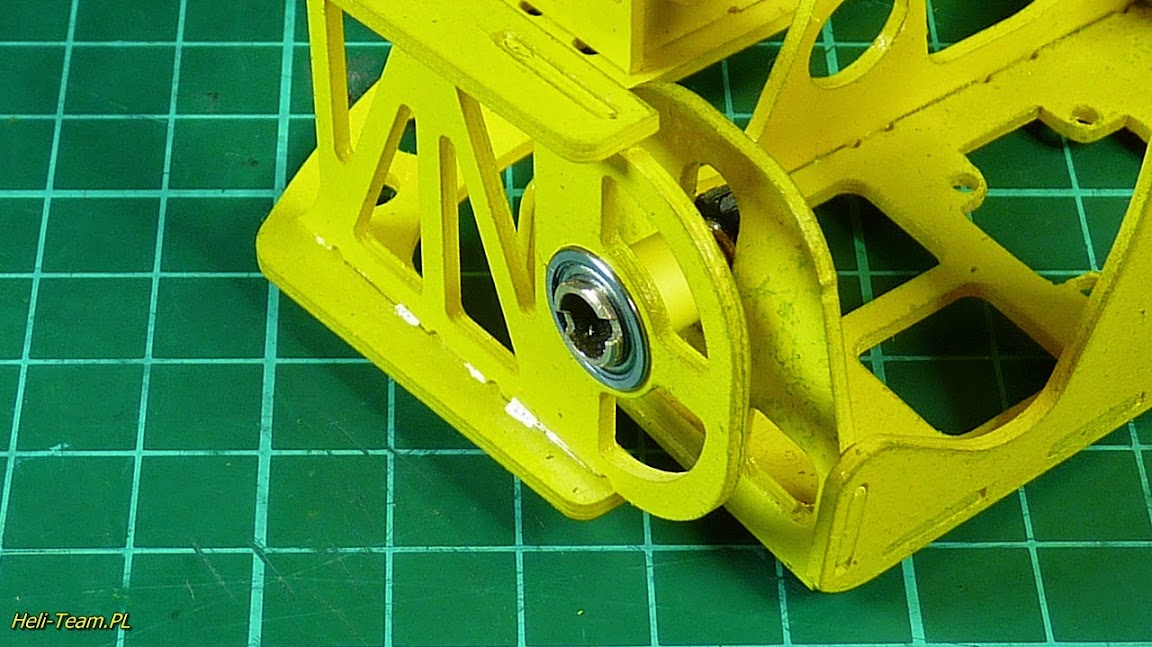
Pozostało jeszcze tylko dokupić odpowiednie łożysko z kołnierzem i można zabierać się za przelotowe zawieszenie z drugiej strony. Po złożeniu widać że tuleja jest zbyt długa. Pójdzie pod nóż. Kolejna sprawa to nakrętka. Miałem do dyspozycji tylko nagwintowany plastikowy element suwaka, który po przycięciu i przecięciu dał mi materiał na nakrętkę. W środek poszła tulejka dystansowa z tworzywa, koniec suwaka naciąłem aby łatwiej go dokręcać. Docelowo pod nakrętką będzie jeszcze metalowa podkładka.




Przyszła pora na przewody. Zastosowałem silikonowe 30AWG, które nawet skręcone nie stanowią problemu. Po przylutowaniu do czujnika zostały przełożone przez ośkę i odpowiednio ułożone. Jak wykazała praktyka, to rozwiązanie idealnie się sprawdziło.





Ponieważ model nie był przewidziany do tego zawieszenia musiałem obciąć znaczną część poprzedniej półki. Wręga w modelu została usztywniona dodatkowo wklejonym na żywicę prętem węglowym, zeszlifowanym na przekrój "D". Podwozie (też z helikoptera) ma wykonane mocowanie ze słupków plastikowych pod rozstaw otworów kontrolera. Po zarobieniu końcówek i wtyczek pozostało podłączenie zasilania, silników i przystąpienie do wyważenia koszyka z aparatem.


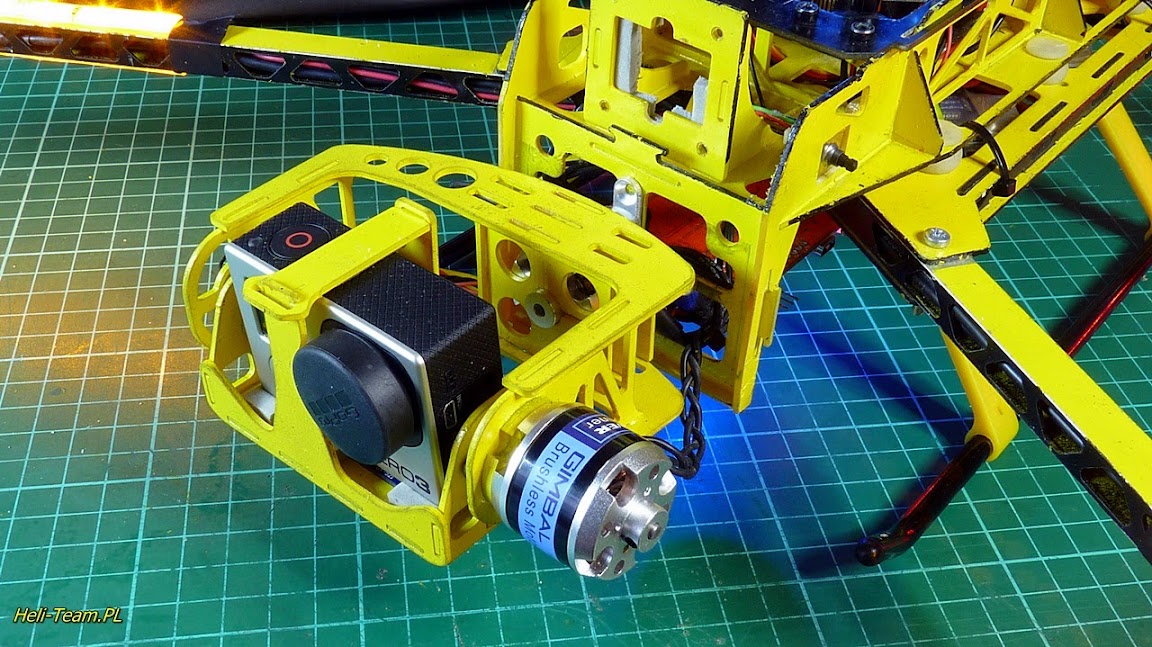
Gotowy gimbal z silnikami i przewodami waży 165 gr.
No i na koniec zobaczmy, jak to działa w powietrzu. Było już po zachodzie słońca i bardzo ciemno więc nie zwracajcie uwagi na ziarnistość materiału.
Widać jeszcze lekkie przechylenia w osi ROLL, ale to kwestia dostrojenia parametrów w programie i wymaga trochę czasu. Jak na razie efekty są bardzo obiecujące. Wkrótce tez będą ciekawsze filmy
Jeżeli chcecie dodatkowe info, dane itp. piszcie w wątku





