
Tulejki można zakładać jak masz mniejszą piastę - przy piaście 8mm trzeba rozwiercić.Marcin15 pisze:Dlatego ja zawsze daje tulejki centrujące które są załączone w zestawie, rozwiertaka nawet nie posiadammisiekkk pisze:Ten mniejszy otwór, który przechodzi na wylot wcale już nie musi być ani osiowy ani trzymać określonego rozmiaru - i to jest zaznaczone w dokumentacji wyraźnie.
Więc rozwiercanie rozwiertakiem kończy się porażką - ponieważ rozwiertak prowadzony jest przez ten drugi, mniejszy otwór, który u mnie był przesunięty o ok. 1mm od osi.
Skrzydełko Vega 1,2m - poradnik w 10 krokach...
Moderatorzy: moderatorzy2014, moderatorzy
Świat z góry wygląda lepiej 
Dzisiaj znowu znalazłem chwilę czasu, więc budowa posuwa się naprzód:
Domek silnika wraz z wręgą przyklejają się do płatowca przy użyciu kleju Soudal A66.
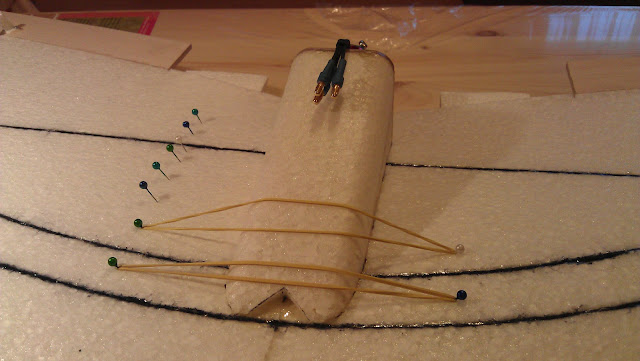
Mocowanie tymczasowe na gumkach zapiętych o szpilki wbite oczywiście pod bardzo dużym kątem w piankę płatowca ( aby ich nie wyrwało )
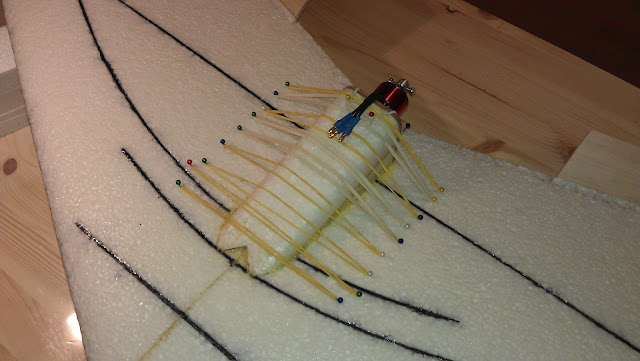
Dodatkowo w przodzie 2 szpilki przebite przez domek, klej i płatowiec - w tym miejscu gumki nie były w stanie odpowiednio docisnąć domku - usunąłem je jak tylko klej zaczął tężeć więc nie ma ich na zdjęciu. Nie można ich trzymać zbyt długo, ponieważ jak klej je złapie, to albo zostaną na zawsze albo wyrwą się z kawałkiem pianki.
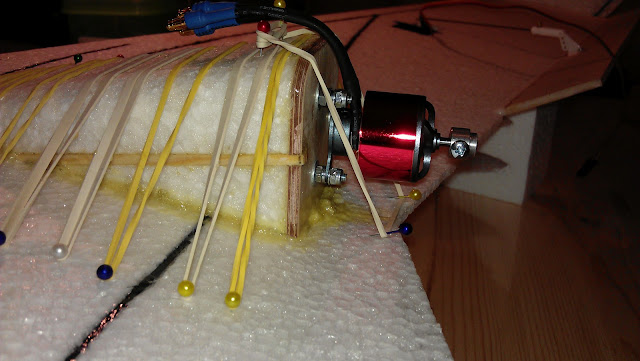
Przestrzegałem przed tym, że klej Soudal A66 lubi się pienić - dzisiaj też mi się spienił mocniej niż przewidywałem - trzeba to będzie później usunąć.
Być może winne była duża wilgotność powietrza w dniu dzisiejszym.
Teraz czas na przygotowanie "wisienki" na torcie, czyli stabilizacji.
W tym celu bierzemy:

Hobbyking i86 Multi-Rotor Control Board
(ważne aby to była wersja pełna a nie i86L ( light ? ) - OpenAero nie obsługuje wersji i86L
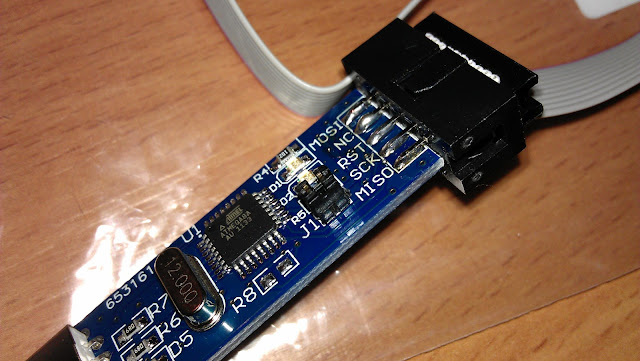
Do tego potrzebujemy programatorek - swego czasu kupiłem w HobbyKing USBasp AVR Programming Device for ATMEL proccessors - tani a sprawuje się bardzo dobrze, a co najważniejsze ma od razu wtyczkę 10 i 6 pinową - ta druga pasuje jak ulał do płytek stabilizatorów.
Ważne aby tą wtyczkę podłączyć właściwie:
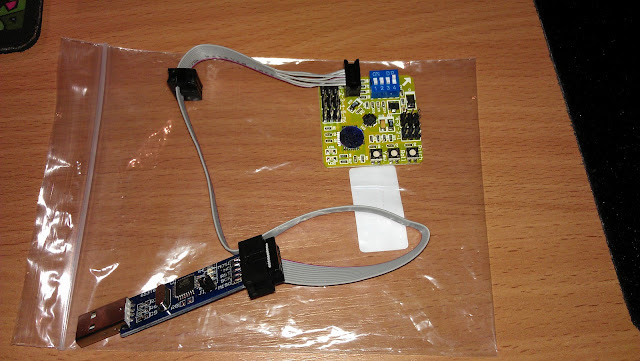
Przy oryginalnym kabelku połączeniowym należy tak podłączyć wtyczkę:

Wrzucam ten obrazek, ponieważ ciężko tą informację znaleźć na sieci - jedynym sposobem aby to stwierdzić bez wnikania w manual procesora ( na płytce złącze ISP nie ma opisanych pinów ) było prześledzenie trasy przewodu z masą.
Mam nadzieję, że obrazek zaoszczędzi Wam tego szukania.
Ważne jeszcze aby na programatorze mieć zapiętą zworę J1 - dzięki temu programator zasila płytkę ( wydajność prądowa 500mA - spokojnie wystarczy ) i nie potrzebujemy podawać zewnętrznego zasilania.
Czyli elektrycznie mamy wszystko podłączone - teraz soft.
Teraz trzeba przygotować soft:
- sterownik do programatora ( czyli nasz USBasp ) - najlepiej wybrać polecane przez lazyzero z fischl.de: usbasp.2011-05-28.tar.gz lub nowsze jak się pojawią
Po podłączeniu programatora do portu USB system poprosi o wskazanie sterowników lub sam będzie chciał ich poszukać - należy wskazać sterowniki z pobranego pliku, z podkatalogu: /usbasp.2011-05-28/bin/win-driver/libusb_1.2.4.0/
- oprogramowanie do flashowania ( samo ściągnie potrzebny nam firmware )
Oprogramowanie pobieramy ze strony: http://lazyzero.de/en/modellbau/kkmulticopterflashtool, najnowszą wersję, obecnie jest to KKmulticopter Flash Tool V0.63 beta 8 ( starsze nie obsługują płyt i86/Eagle N6 )
Rozpakowujemy KKmulticopter Flash Tool V0.63 beta 8 ( do uruchomienia wymaga najnowszej Javy ), uruchamiamy ( mamy różne wersje pliku startowego, zależnie od posiadanego systemu ), a następnie:
- wybieramy programator: USBasp
- wybieramy kontroler: i86 / Eagle N6
- wybieramy firmware: dla OpenAero w obecnej wersji 1.13 Beta 6 mamy do wyboru: PWM1, PWM2 lub CPPM. Ja wybrałem CPPM - zobaczymy jak to zadziała.
Programujemy.
Jeżeli wszystko będzie OK, po zaprogramowaniu czerwona kontrolka zacznie świecić słabym światłem a niebieska zacznie po kilkunastu sekundach migać - to taka sygnalizacja położenia modelu, jeżeli nie ma sygnału z odbiornika.
Schemat podłączenia powinien być następujący ( uzgodniłem go z autorem OpenAero HappySunday - tutaj wątek na rcgroups w tym temacie) :
M2 left wing
M3 rudder ( w moim skrzydle nie będzie wykorzystany )
M4 right wing
M1 - tu przychodzi sygnał CPPM z odbiornika ( tak, to nie pomyłka - wejścia i wyjścia są trochę pomieszane )
M5 LCD
Jeżeli do tego chcemy LCD ( typu Serial Enabled 16x2 LCD - Black on Green 3.3V ) to podłączamy go pod M5:
+:+
-:-
signal:RX
( tego typu wyświetlacze taniej można znaleźć na ebay )
Kolejność kanałów w sygnale CPPM jest bardzo ważna ( jeżeli mamy aparaturę swobodnie programową, np. Turnigy 9x z softem er9x lub radioclone, to ustawiamy je następująco):
CH1: Throttle
CH2: aileron
CH3: elevator
CH4: Rudder ( nie używany w moim przypadku )
CH5: N/C
CH6: N/C
CH7: N/C
CH8: Aux 2 <-- włącznik/wyłącznik stabilizacji
Sygnał do regulatora silnika Throttle podłączamy do złącza Throttle na płytce ( to jest wyjście sygnału PWM dla silnika )
Ważne informacja dla posiadaczy nadajników typu Spektrum/Futaba - tam podobno jest inna kolejność sygnałów w sygnale CPPM w odbiornikach CPPM i podobno nie za bardzo da się to zmienić - HappySunday pracuje nad tym aby się do tego dostosować - narazie obsługiwany jest standard JR.
I ostatnia rzecz - ustawiamy przełączniki dla skrzydełka zgodnie z czerwonym kropkami na tym zdjęciu ( sprwawdzone przez lazyzero )

Dla innych typów statków powietrznych można odnaleźć właściwe ustawienie przełączinków w opisie lazyzero na rcgroups: http://www.rcgroups.com/forums/showpost.php?p=21981135&postcount=1193
Informacje powyższe podaję orientacyjnie - jeszcze nie uruchomiłem platformy, więc nie wiem czy wszystko zadziała prawidłowo.
Domek silnika wraz z wręgą przyklejają się do płatowca przy użyciu kleju Soudal A66.
Mocowanie tymczasowe na gumkach zapiętych o szpilki wbite oczywiście pod bardzo dużym kątem w piankę płatowca ( aby ich nie wyrwało )
Dodatkowo w przodzie 2 szpilki przebite przez domek, klej i płatowiec - w tym miejscu gumki nie były w stanie odpowiednio docisnąć domku - usunąłem je jak tylko klej zaczął tężeć więc nie ma ich na zdjęciu. Nie można ich trzymać zbyt długo, ponieważ jak klej je złapie, to albo zostaną na zawsze albo wyrwą się z kawałkiem pianki.
Przestrzegałem przed tym, że klej Soudal A66 lubi się pienić - dzisiaj też mi się spienił mocniej niż przewidywałem - trzeba to będzie później usunąć.
Być może winne była duża wilgotność powietrza w dniu dzisiejszym.
Teraz czas na przygotowanie "wisienki" na torcie, czyli stabilizacji.
W tym celu bierzemy:
Hobbyking i86 Multi-Rotor Control Board
(ważne aby to była wersja pełna a nie i86L ( light ? ) - OpenAero nie obsługuje wersji i86L
Do tego potrzebujemy programatorek - swego czasu kupiłem w HobbyKing USBasp AVR Programming Device for ATMEL proccessors - tani a sprawuje się bardzo dobrze, a co najważniejsze ma od razu wtyczkę 10 i 6 pinową - ta druga pasuje jak ulał do płytek stabilizatorów.
Ważne aby tą wtyczkę podłączyć właściwie:
Przy oryginalnym kabelku połączeniowym należy tak podłączyć wtyczkę:
Wrzucam ten obrazek, ponieważ ciężko tą informację znaleźć na sieci - jedynym sposobem aby to stwierdzić bez wnikania w manual procesora ( na płytce złącze ISP nie ma opisanych pinów ) było prześledzenie trasy przewodu z masą.
Mam nadzieję, że obrazek zaoszczędzi Wam tego szukania.
Ważne jeszcze aby na programatorze mieć zapiętą zworę J1 - dzięki temu programator zasila płytkę ( wydajność prądowa 500mA - spokojnie wystarczy ) i nie potrzebujemy podawać zewnętrznego zasilania.
Czyli elektrycznie mamy wszystko podłączone - teraz soft.
Teraz trzeba przygotować soft:
- sterownik do programatora ( czyli nasz USBasp ) - najlepiej wybrać polecane przez lazyzero z fischl.de: usbasp.2011-05-28.tar.gz lub nowsze jak się pojawią
Po podłączeniu programatora do portu USB system poprosi o wskazanie sterowników lub sam będzie chciał ich poszukać - należy wskazać sterowniki z pobranego pliku, z podkatalogu: /usbasp.2011-05-28/bin/win-driver/libusb_1.2.4.0/
- oprogramowanie do flashowania ( samo ściągnie potrzebny nam firmware )
Oprogramowanie pobieramy ze strony: http://lazyzero.de/en/modellbau/kkmulticopterflashtool, najnowszą wersję, obecnie jest to KKmulticopter Flash Tool V0.63 beta 8 ( starsze nie obsługują płyt i86/Eagle N6 )
Rozpakowujemy KKmulticopter Flash Tool V0.63 beta 8 ( do uruchomienia wymaga najnowszej Javy ), uruchamiamy ( mamy różne wersje pliku startowego, zależnie od posiadanego systemu ), a następnie:
- wybieramy programator: USBasp
- wybieramy kontroler: i86 / Eagle N6
- wybieramy firmware: dla OpenAero w obecnej wersji 1.13 Beta 6 mamy do wyboru: PWM1, PWM2 lub CPPM. Ja wybrałem CPPM - zobaczymy jak to zadziała.
Programujemy.
Jeżeli wszystko będzie OK, po zaprogramowaniu czerwona kontrolka zacznie świecić słabym światłem a niebieska zacznie po kilkunastu sekundach migać - to taka sygnalizacja położenia modelu, jeżeli nie ma sygnału z odbiornika.
Schemat podłączenia powinien być następujący ( uzgodniłem go z autorem OpenAero HappySunday - tutaj wątek na rcgroups w tym temacie) :
M2 left wing
M3 rudder ( w moim skrzydle nie będzie wykorzystany )
M4 right wing
M1 - tu przychodzi sygnał CPPM z odbiornika ( tak, to nie pomyłka - wejścia i wyjścia są trochę pomieszane )
M5 LCD
Jeżeli do tego chcemy LCD ( typu Serial Enabled 16x2 LCD - Black on Green 3.3V ) to podłączamy go pod M5:
+:+
-:-
signal:RX
( tego typu wyświetlacze taniej można znaleźć na ebay )
Kolejność kanałów w sygnale CPPM jest bardzo ważna ( jeżeli mamy aparaturę swobodnie programową, np. Turnigy 9x z softem er9x lub radioclone, to ustawiamy je następująco):
CH1: Throttle
CH2: aileron
CH3: elevator
CH4: Rudder ( nie używany w moim przypadku )
CH5: N/C
CH6: N/C
CH7: N/C
CH8: Aux 2 <-- włącznik/wyłącznik stabilizacji
Sygnał do regulatora silnika Throttle podłączamy do złącza Throttle na płytce ( to jest wyjście sygnału PWM dla silnika )
Ważne informacja dla posiadaczy nadajników typu Spektrum/Futaba - tam podobno jest inna kolejność sygnałów w sygnale CPPM w odbiornikach CPPM i podobno nie za bardzo da się to zmienić - HappySunday pracuje nad tym aby się do tego dostosować - narazie obsługiwany jest standard JR.
I ostatnia rzecz - ustawiamy przełączniki dla skrzydełka zgodnie z czerwonym kropkami na tym zdjęciu ( sprwawdzone przez lazyzero )
Dla innych typów statków powietrznych można odnaleźć właściwe ustawienie przełączinków w opisie lazyzero na rcgroups: http://www.rcgroups.com/forums/showpost.php?p=21981135&postcount=1193
Informacje powyższe podaję orientacyjnie - jeszcze nie uruchomiłem platformy, więc nie wiem czy wszystko zadziała prawidłowo.
Ostatnio zmieniony niedziela 05 sty 2014, 16:10 przez misiekkk, łącznie zmieniany 3 razy.
Świat z góry wygląda lepiej
Skrzydełko już się maluje - pierwszy kolor położony:

Malowane farbami w sprayu na bazie wody AQUA Dupli Color
Malowane farbami w sprayu na bazie wody AQUA Dupli Color
Świat z góry wygląda lepiej

Wylądujesz na trawie pokrytej rosą i będzie picasso z malowania :)
Pozdrawia Kuba
http://www.radawiecrc.pl
http://www.radawiecrc.pl
-
krzysiek3d
- Posty: 663
- Rejestracja: wtorek 04 paź 2011, 17:32
- Lokalizacja: Kraków
Treść skasowana przez autora.
Ostatnio zmieniony niedziela 26 sty 2014, 02:46 przez krzysiek3d, łącznie zmieniany 1 raz.
"Twoja racja, mój święty spokój. Szkoda nerwów na walkę z wiatrakami."
Z własnej decyzji, "czytacz forumowy".
Pozdrawiam
Z własnej decyzji, "czytacz forumowy".
Pozdrawiam
Dobrze krzysiek3d mówi - stosuję te farby od 2 lat i po utwardzeniu są odporne na wodę.krzysiek3d pisze:Nie do końca, po utwardzeniu farby te są niezmywalne wodą :).jakuban pisze:Wylądujesz na trawie pokrytej rosą i będzie picasso z malowania :)
Znalazłem tylko 2 metody na ich usunięcie:
- spirytus - ale słabo rozpuszcza i ogólnie go szkoda do takich celów
- chusteczki nawilżane dla niemowląt Nivea - nie wiem czym to jest nawilżane, ale dobrze rozpuszcza tą farbę jak i wiele innych rzeczy - ostatnio usuwałem nimi smołę z lakieru i szyby samochodu - polecam.
Świat z góry wygląda lepiej
Dobrze wiedzieć, nieraz opisy nie są dokłądne a wiadomo jak w modelarstwie bywa:)misiekkk pisze:Dobrze krzysiek3d mówi - stosuję te farby od 2 lat i po utwardzeniu są odporne na wodę.krzysiek3d pisze:Nie do końca, po utwardzeniu farby te są niezmywalne wodą :).jakuban pisze:Wylądujesz na trawie pokrytej rosą i będzie picasso z malowania :)
Kurcze, straszne, to niby dla delikatnej skórki dzieci... a tu smołę prosze można wyczyścić, chociaż z drugiej strony, dziecko różne rzeczy bierze do rąk, wieć może producenci przewidzieli i smołę.misiekkk pisze:Znalazłem tylko 2 metody na ich usunięcie:
- spirytus - ale słabo rozpuszcza i ogólnie go szkoda do takich celów
- chusteczki nawilżane dla niemowląt Nivea - nie wiem czym to jest nawilżane, ale dobrze rozpuszcza tą farbę jak i wiele innych rzeczy - ostatnio usuwałem nimi smołę z lakieru i szyby samochodu - polecam.
Pozdrawia Kuba
http://www.radawiecrc.pl
http://www.radawiecrc.pl
-
Artu
Głównym przeznaczeniem tych chusteczek jest wycieranie czegoś innego niż ręce dzieckajakuban pisze:Kurcze, straszne, to niby dla delikatnej skórki dzieci... a tu smołę prosze można wyczyścić, chociaż z drugiej strony, dziecko różne rzeczy bierze do rąk, wieć może producenci przewidzieli i smołę.
A swoją drogą, są bardzo chwalone do czyszczenia modeli spalinowych z "wypluwek" tłumika
-
krzysiek3d
- Posty: 663
- Rejestracja: wtorek 04 paź 2011, 17:32
- Lokalizacja: Kraków
Treść skasowana przez autora.
Ostatnio zmieniony niedziela 26 sty 2014, 02:46 przez krzysiek3d, łącznie zmieniany 1 raz.
"Twoja racja, mój święty spokój. Szkoda nerwów na walkę z wiatrakami."
Z własnej decyzji, "czytacz forumowy".
Pozdrawiam
Z własnej decyzji, "czytacz forumowy".
Pozdrawiam



-
krzysiek3d
- Posty: 663
- Rejestracja: wtorek 04 paź 2011, 17:32
- Lokalizacja: Kraków
Treść skasowana przez autora.
Ostatnio zmieniony niedziela 26 sty 2014, 02:39 przez krzysiek3d, łącznie zmieniany 1 raz.
"Twoja racja, mój święty spokój. Szkoda nerwów na walkę z wiatrakami."
Z własnej decyzji, "czytacz forumowy".
Pozdrawiam
Z własnej decyzji, "czytacz forumowy".
Pozdrawiam
697g kompletny, dodatkowo 19g kamera 808 #16, czyli razem 716g.
Waga zbliżona do wstępnych założeń - doszła stabilizacja i kamera.
Mam pytanie do kolegów bardziej doświadczonych w latających skrzydłach - jakie powinno być wychylenie lotek w takim modelu ?
Ja mam ok. 2,5 cm góra-dół, w pozycji neutralnej odchylenie ok. 2mm w górę.
Wiem, że dokładne parametry trzeba dobrać w locie, ale ponieważ nigdy nie latałem skrzydełkiem, nie chciałbym go rozbić przy pierwszym locie.
Waga zbliżona do wstępnych założeń - doszła stabilizacja i kamera.
Mam pytanie do kolegów bardziej doświadczonych w latających skrzydłach - jakie powinno być wychylenie lotek w takim modelu ?
Ja mam ok. 2,5 cm góra-dół, w pozycji neutralnej odchylenie ok. 2mm w górę.
Wiem, że dokładne parametry trzeba dobrać w locie, ale ponieważ nigdy nie latałem skrzydełkiem, nie chciałbym go rozbić przy pierwszym locie.
Świat z góry wygląda lepiej