Witam.
Złożyłem swojego pierwszego Quadrokoptera i próbuję robić pierwsze loty. Jak na razie wykonałem kilka lotów z czego trzy zakończyły się kretem. Moja konfiguracja to: F450, Emax MT2216,śmigła 1045, ESC SimonK 30A, APM 2.8 , Ublox NEO-M8N, odbiornik X8R, nadajnik FrSky 2.4G JR XJT, apka Turnigy 9XR Pro.
Dzisiaj wystartowałem w stablilize a po chwili przełączyłem na Loiter, wtedy kopter zatrzymał się i zawisł w miejscu na wysokości ok 10m. Po chwili podniosłem wysokość o ok 5m i robiłem obrót wokół osi Yaw. Zauważyłem, że po woli kopter zaczął uciekać w bok ( w trybie Loiter ) . Próbowałem zawrócić go lecz cały czas uciekał w bok. Postanowiłem wylądować lecz zaliczyłem kreta. Zaciągnąłem loga ale nie potrafię nic z tego odczytać. Prosił bym o info co jest w tym logu. Na baro w APM mam gąbkę, śmigła były wyważone. APM skonfigurowany według opisu kolegi maxiiii.
Link- https://www.dropbox.com/sh/e6wguijc18tg ... xt0Ka?dl=0
APM 2.8 Prośba o odczytanie loga
Moderatorzy: moderatorzy2014, moderatorzy

Re: APM 2.8 Prośba o odczytanie loga
Po logach widać trochę inne czynności. najpierw loiter a potem stabilize. Może to nie ten log?
Ale z twojego opisu wynika iż to problem z kompasem.
Ale z twojego opisu wynika iż to problem z kompasem.
Re: APM 2.8 Prośba o odczytanie loga
Możliwe że trochę pomyliłem, ale po wzniesieniu w górę po chwili przełączyłem na Loiter i kopter stanął w miejscu, lecz może faktycznie zanim to zrobiłem przełączałem dwa razy. Czy to ten log to myślę że tak, był to ostatni log ( najwyższy numer na samym dole w Log downloaderze ) Jeżeli chodzi o kompas to wychodzi na to, że mój przedostatni lot też miał chyba z nim problem gdyż kopter w powietrzu po chwili też zaczął sam lecieć bokiem no i był kret. Szkoda, że wtedy nie przełączyłem na stabilize bo wtedy kompas nie jest brany pod uwagę. Takie miałem dwa ostatnie loty ,a jeszcze dwa wcześniejsze to były chyba prawidłowe gdyż kopter nie uciekał, sprawdziłem czy działa Geo Fence i lądowanie. Wszystko było ok ( bynajmniej tak mi się wydawało ) Co według ciebie powinienem sprawdzić z kompasem? Kilka razy robiłem kalibrację kompasu ( może nie udało mi się skalibrować prawidłowo?) może spróbuję podmienić kompas bo mam dwa Ublox NEO-M8N choć jak otworzyłem obudowę to trochę mają inne bebechy. Na razie na pewno muszę wymienić dwa regulatory ESC. Przy ostatnim krecie ( wpadł w krzaki ) nie mogłem wyłączyć silników. Jaki jest dobry sposób aby podczas kreta sforsować wyłączenie silników?
14-05-2017r.
Dzisiejszy nie udany lot.
Wymieniłem trzy uszkodzone regulatory ESC i dla próby wymieniłem też kompas i APM 2,8. Konfigurację APM zrobiłem zgodnie z opisem na tym forum. Czytałem kilka razy aby dobrze skalibrować między innymi kompas i wszystko wyszło ok. Po podłączeniu zasilania czekałem jeszcze ok 4 minuty i dopiero zazbroiłem silniki. Po wzbiciu się w powietrze na ok 4m tryb Loiter trzymał koptera przez ok 15 s. Usłyszałem kilka dźwięków, domyślam się że to chyba z APM-a ( mam dwa buzery jeden w APM a drugi w kontrolerze napięcia ) Akumulator jest nowy 4s 5000mA i był naładowany przed lotem, a napięcie na nim miałem ustawione 3,6V więc słyszałem chyba APM-a. W pewnym momencie kopter zaczął dryfować. Po przełączeniu w stabilize jeszcze szybciej uciekał. Zminimalizowałem przepustnicę gazu i w pewnej chwili kopter odwrucił się śmigłami w dół i tak spadł. W efekcie złamany pałąk z GPS-u i złamane śmigło. Regulatorów jeszcze nie sprawdzałem więc nie wiem czy znów coś nie będzie do wymiany. Mój APM nie jest zamocowany na podstawce antywibracyjnej gdyż takowa się nie mieści na mojej ramie F450 pomiędzy płytkami. Na chwilę obecną mam przyklejoną płytkę PCV o grubości 1cm. za pomocą taśmy piankowej dwustronnej i dopiero do tej płytki na tej samej taśmie przyklejony jest APM.
Poniżej podaję linka do logu, może z niego da się coś wywnioskować.
https://www.dropbox.com/sh/bkril4k1uuqq ... 1AXGa?dl=0
14-05-2017r.
Dzisiejszy nie udany lot.
Wymieniłem trzy uszkodzone regulatory ESC i dla próby wymieniłem też kompas i APM 2,8. Konfigurację APM zrobiłem zgodnie z opisem na tym forum. Czytałem kilka razy aby dobrze skalibrować między innymi kompas i wszystko wyszło ok. Po podłączeniu zasilania czekałem jeszcze ok 4 minuty i dopiero zazbroiłem silniki. Po wzbiciu się w powietrze na ok 4m tryb Loiter trzymał koptera przez ok 15 s. Usłyszałem kilka dźwięków, domyślam się że to chyba z APM-a ( mam dwa buzery jeden w APM a drugi w kontrolerze napięcia ) Akumulator jest nowy 4s 5000mA i był naładowany przed lotem, a napięcie na nim miałem ustawione 3,6V więc słyszałem chyba APM-a. W pewnym momencie kopter zaczął dryfować. Po przełączeniu w stabilize jeszcze szybciej uciekał. Zminimalizowałem przepustnicę gazu i w pewnej chwili kopter odwrucił się śmigłami w dół i tak spadł. W efekcie złamany pałąk z GPS-u i złamane śmigło. Regulatorów jeszcze nie sprawdzałem więc nie wiem czy znów coś nie będzie do wymiany. Mój APM nie jest zamocowany na podstawce antywibracyjnej gdyż takowa się nie mieści na mojej ramie F450 pomiędzy płytkami. Na chwilę obecną mam przyklejoną płytkę PCV o grubości 1cm. za pomocą taśmy piankowej dwustronnej i dopiero do tej płytki na tej samej taśmie przyklejony jest APM.
Poniżej podaję linka do logu, może z niego da się coś wywnioskować.
https://www.dropbox.com/sh/bkril4k1uuqq ... 1AXGa?dl=0
Re: APM 2.8 Prośba o odczytanie loga
Tak jak pisałem kompas do tyłka
PARM, COMPASS_ORIENT, 0
PARM, COMPASS_EXTERNAL, 1
nie dałeś przy zewnętrznym kompasie rol 180.
Masz Power Module? Masz włączone FS na bateryjce.
THR_mid daj na 480.
ZmieN FENCE na trochę więcej (ok 50m)
PARM, COMPASS_ORIENT, 0
PARM, COMPASS_EXTERNAL, 1
nie dałeś przy zewnętrznym kompasie rol 180.
Masz Power Module? Masz włączone FS na bateryjce.
THR_mid daj na 480.
ZmieN FENCE na trochę więcej (ok 50m)
Re: APM 2.8 Prośba o odczytanie loga
Dzięki za szybką odpowiedź.
Faktycznie nie dałem rol 180 przy wymianie APM-a i kompasu.
Mam power moduł tylko nie ustawiałem go gdyż do końca nie wiem jak. Resztę co napisałeś dzisiaj zmienię.
Zauważyłem, że w MP w zakładce flight data po załapaniu fixa, kopter cały czas wędrował w promieniu kilku metrów choć fizycznie stał w miejscu. Czy to normalne że program widzi, że kopter się przemieszcza?
Faktycznie nie dałem rol 180 przy wymianie APM-a i kompasu.
Mam power moduł tylko nie ustawiałem go gdyż do końca nie wiem jak. Resztę co napisałeś dzisiaj zmienię.
Zauważyłem, że w MP w zakładce flight data po załapaniu fixa, kopter cały czas wędrował w promieniu kilku metrów choć fizycznie stał w miejscu. Czy to normalne że program widzi, że kopter się przemieszcza?
Re: APM 2.8 Prośba o odczytanie loga
Dzisiejszy lot też zakończył się kretem.
Kopter został uzbrojony po 5 minutach. W powietrzu na Loiterze nie trzymał ani wysokości ani położenia ( dryfował ) Chwilami miałem wrażenie jak by się coś mu odwidziało i poprawnie działał np. w Loiterze lecz po chwili znowu coś się działo i dryfował jak i zmieniał wysokość. Próbowałem znieniać tryby lotu np. w Stabilize lecz po chwili jakby znów nie słuchał do końca aparatury. Nie wiem czy czasami odbiornik nie tracił sygnał z nadajnika.( choć to tylko mój domysł ) Momentami jak by wszystko działało a po chwili jak by kopter nie chciał słuchać. Kilka razy miał tak jakby czkawkę. Silniki dostawały obrotu i od razu zwalniały i tak kilkukrotnie. Miałem dzisiaj dwa loty, pierwszy raz udało mi się z wielkim trudem wylądować. Za drugim razem po krótkim locie wystrzelił do góry i nie słuchał aparatury, lecz po chwili zaczął lądować jak strzała przed ziemią chciałem mu dodać gazu aby nie runął z impetem, lecz on znowu wystrzelił do góry. Myśl, że zatrzymało go Geofence choć nie jestem do końca pewien. Po drugim razie kopter runął na ziemię i za nim do niego doszedłem to od razu rozbroiłem silniki lecz cały czas dwa silniki się kręciły. Po podniesieniu kopter zwiększał obroty silników lecz miał już uszkodzone dwa regle. Nie wiem dlaczego nie mogłem go rozbroić, więc rozpiołem wtyczkę zasilającą i chyba z tego powodu nie mam dwóch logów z dzisiejszego lotu. W APMie są dwa logi lecz jeden ma datę jeszcze z maja i teraz domyślam się że jest to dzisiejszy mój pierwszy lot a z drugiego nie ma logu. Ja już nie wiem jaki mam problem z tym kopterem. Wcześniej był kompas, został zmieniony w MP na roll 180 kalibracja była ok. Mam filmik z dzisiejszego lotu i jak by ktoś chciał zobaczyć to mogę udostępnić. Prosił bym kolegów o sprawdzenie co można odczytać z loga.
https://www.dropbox.com/sh/f6hf298e22lq ... lZRra?dl=0
Kopter został uzbrojony po 5 minutach. W powietrzu na Loiterze nie trzymał ani wysokości ani położenia ( dryfował ) Chwilami miałem wrażenie jak by się coś mu odwidziało i poprawnie działał np. w Loiterze lecz po chwili znowu coś się działo i dryfował jak i zmieniał wysokość. Próbowałem znieniać tryby lotu np. w Stabilize lecz po chwili jakby znów nie słuchał do końca aparatury. Nie wiem czy czasami odbiornik nie tracił sygnał z nadajnika.( choć to tylko mój domysł ) Momentami jak by wszystko działało a po chwili jak by kopter nie chciał słuchać. Kilka razy miał tak jakby czkawkę. Silniki dostawały obrotu i od razu zwalniały i tak kilkukrotnie. Miałem dzisiaj dwa loty, pierwszy raz udało mi się z wielkim trudem wylądować. Za drugim razem po krótkim locie wystrzelił do góry i nie słuchał aparatury, lecz po chwili zaczął lądować jak strzała przed ziemią chciałem mu dodać gazu aby nie runął z impetem, lecz on znowu wystrzelił do góry. Myśl, że zatrzymało go Geofence choć nie jestem do końca pewien. Po drugim razie kopter runął na ziemię i za nim do niego doszedłem to od razu rozbroiłem silniki lecz cały czas dwa silniki się kręciły. Po podniesieniu kopter zwiększał obroty silników lecz miał już uszkodzone dwa regle. Nie wiem dlaczego nie mogłem go rozbroić, więc rozpiołem wtyczkę zasilającą i chyba z tego powodu nie mam dwóch logów z dzisiejszego lotu. W APMie są dwa logi lecz jeden ma datę jeszcze z maja i teraz domyślam się że jest to dzisiejszy mój pierwszy lot a z drugiego nie ma logu. Ja już nie wiem jaki mam problem z tym kopterem. Wcześniej był kompas, został zmieniony w MP na roll 180 kalibracja była ok. Mam filmik z dzisiejszego lotu i jak by ktoś chciał zobaczyć to mogę udostępnić. Prosił bym kolegów o sprawdzenie co można odczytać z loga.
https://www.dropbox.com/sh/f6hf298e22lq ... lZRra?dl=0
Re: APM 2.8 Prośba o odczytanie loga
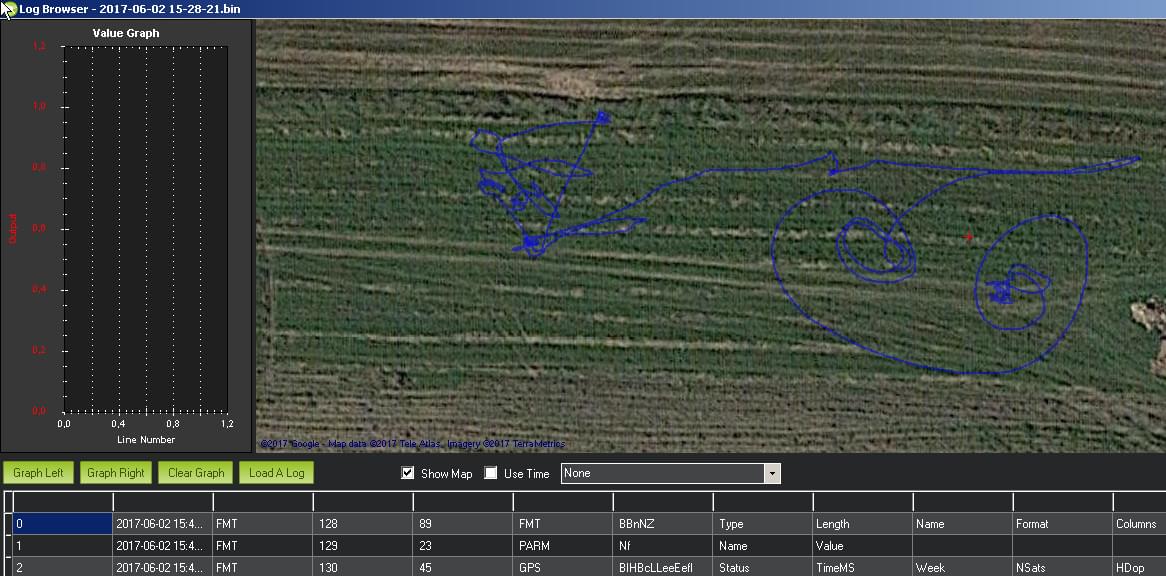
Taka serpentynka to ewidentnie źle skonfigurowany kompas.

Tak ustaw fence aby nie włączał się FS
Re: APM 2.8 Prośba o odczytanie loga
Przed chwilą na nowo skalibrowałem kompas offsets X:-96 , Y:-2 , Z:3maxiiii pisze:
Taka serpentynka to ewidentnie źle skonfigurowany kompas.
Tak ustaw fence aby nie włączał się FS
roll jest 180. Kompas kalibrowałem kilka razy i szybko był komunikat o skalibrowanym kompasie.
Maxiii co do ustawienia "fence aby nie włączał się FS"
Czy te zmiany o które ci chodzi to mają być maksymalna wysokość i maksymalna odległość koptera w geo fance?
Wyjątkowo dzisiaj latałem ok 100 - 150 metrów od linii wysokiego napięcia. Czy taka odległość może zakłucić pracę kompasu? Czy z logów widać że może była zakłucona praca barometru? W geo fance jest ustawiona wysokość 20m a kopter wystrzelił dużo wyżej.
'
Re: APM 2.8 Prośba o odczytanie loga
Tak nie dojdziemy do ładu. Za długo masz problem z kompasem.
Potrzebne będą zdjęcia:
1. całości elektroniki i kompasu.
2. wnętrza apema
3. widok kompasu w gps-ie.
4. zrzut ekranu z ustawienia gps..
Jak to porobisz to może coś zaradzimy na twój problem.
Potrzebne będą zdjęcia:
1. całości elektroniki i kompasu.
2. wnętrza apema
3. widok kompasu w gps-ie.
4. zrzut ekranu z ustawienia gps..
Jak to porobisz to może coś zaradzimy na twój problem.
Re: APM 2.8 Prośba o odczytanie loga
Ok.
Do jutra postaram się zrobić zdjęcia o których piszesz, a na szybko log z dzisiejszego lotu.
Wychodzi na to że dalej problem z kompasem. po chwili lotu wystrzelił jak strzała do góry i przez chwilę nie miałem nad nim kontroli.
Log:
https://www.dropbox.com/sh/s1m6ee44r4ea ... cTCFa?dl=0
Poniżej udostępniam zdjęcia o których pisałeś.
Apm mam przyklejony na taśmie dwustronnej do płytki teflonowej a płytka przyklejona jest do podstawy koptera. Mam kupioną podstawkę pod APM, próbowałem ją dopasować przez szlifowanie lecz nie chce sie zmieścić dlatego z niej zrezygnowałem. Po rozebraniu APM-A jeszcze troszkę obciołem gąbkę w APMie. Jak go kupowałem to nie miał żadnej gąbki. Ostatni lot ( log powyżej ) zasilanie do APMa i odbiornika podłączyłem od ESC a power modul był odłączony. ( wypięta była wtyczka zasilająca APM a zasilanie silników dalej było przez power modul ). Czy po logach można sprawdzić dlaczego kopter przestawał słuchać apki i potrafił zrywać się energicznie do góry? W trybie loiter raz stał w miejscu a raz dryfował, może na jakimś kabelku zrywa sie sygnał?
Zdjęcia:
https://www.dropbox.com/sh/b8heyy2i821u ... ztTVa?dl=0
Do jutra postaram się zrobić zdjęcia o których piszesz, a na szybko log z dzisiejszego lotu.
Wychodzi na to że dalej problem z kompasem. po chwili lotu wystrzelił jak strzała do góry i przez chwilę nie miałem nad nim kontroli.
Log:
https://www.dropbox.com/sh/s1m6ee44r4ea ... cTCFa?dl=0
Poniżej udostępniam zdjęcia o których pisałeś.
Apm mam przyklejony na taśmie dwustronnej do płytki teflonowej a płytka przyklejona jest do podstawy koptera. Mam kupioną podstawkę pod APM, próbowałem ją dopasować przez szlifowanie lecz nie chce sie zmieścić dlatego z niej zrezygnowałem. Po rozebraniu APM-A jeszcze troszkę obciołem gąbkę w APMie. Jak go kupowałem to nie miał żadnej gąbki. Ostatni lot ( log powyżej ) zasilanie do APMa i odbiornika podłączyłem od ESC a power modul był odłączony. ( wypięta była wtyczka zasilająca APM a zasilanie silników dalej było przez power modul ). Czy po logach można sprawdzić dlaczego kopter przestawał słuchać apki i potrafił zrywać się energicznie do góry? W trybie loiter raz stał w miejscu a raz dryfował, może na jakimś kabelku zrywa sie sygnał?
Zdjęcia:
https://www.dropbox.com/sh/b8heyy2i821u ... ztTVa?dl=0
Re: APM 2.8 Prośba o odczytanie loga
Wszystko wygląda na dobre ustawienia.
Dziwi mnie tylko ten APM. Podłączenie jak przy 2.8 a płytka od 2.6.
Kupiłeś go jako ....?
Dziwi mnie tylko ten APM. Podłączenie jak przy 2.8 a płytka od 2.6.
Kupiłeś go jako ....?
Re: APM 2.8 Prośba o odczytanie loga
Kupiłem na Aliexpressie jako nowy APM 2.8 Strona już nie istnieje bo podał bym linka. Mam jeszcze drugi APM 2,8
z wewnętrznym kompasem też kupiony na Ali, lecz też miałem problem z dryfowaniem więc podmieniłem APMy ale to nic nie zmieniło.
Mam dwa GPSy z kompasem M8N lecz podobnie oba się zachowywały. Piszesz że ustawienia są dobre, a jak wyglądają drgania i barometr? Chyba gdzieś czytałem twojego posta, że zmieniałeś kiedyś oprogramowanie w kompasie i dopiero wtedy zaczął dobrze działać. Może by spróbować?
Poniżej link ze zdjęciami drugiego APMa
https://www.dropbox.com/sh/khwkhtzb09v9 ... IZLea?dl=0
z wewnętrznym kompasem też kupiony na Ali, lecz też miałem problem z dryfowaniem więc podmieniłem APMy ale to nic nie zmieniło.
Mam dwa GPSy z kompasem M8N lecz podobnie oba się zachowywały. Piszesz że ustawienia są dobre, a jak wyglądają drgania i barometr? Chyba gdzieś czytałem twojego posta, że zmieniałeś kiedyś oprogramowanie w kompasie i dopiero wtedy zaczął dobrze działać. Może by spróbować?
Poniżej link ze zdjęciami drugiego APMa
https://www.dropbox.com/sh/khwkhtzb09v9 ... IZLea?dl=0
Re: APM 2.8 Prośba o odczytanie loga
Niestety ale na odległość już nie jestem w stanie ci pomóc.:((

Re: APM 2.8 Prośba o odczytanie loga
To jest APM 2.8 ma wew. kompas.rawka1 pisze:https://www.dropbox.com/sh/khwkhtzb09v9 ... IZLea?dl=0
Teraz jeśli chodzi o budowę, poluzuj troszkę kable na wejściu i wyjściu z APM-a, co prawda nie masz podstawki więc wiele to nie zmieni. Podstawka antywibracyjna to podstawa. Ja mam Hexę i u mnie podstawka się mieści razem z APM między płytami centralnymi.
Aby kopter nie skakał góra dół włącz filtrowanie baro na 20Hz. Sprawdź w MP co się dzieje kiedy przełączasz tryby lotu, może kiedy przełączasz się na inny tryb załącza się RTL, takie nagłe i gwałtowne skoki do góry powoduje tryb RTL, sprawdź na jakiej wysokości ma się znajdować kopter przed podejściem do lądowania, jeśli spada bardzo gwałtownie sprawdź prędkość opadania RTL_SPEED.
Na zdjęciach z loga widać że kopter zatacza tzw koła co może świadczyć o źle ustawionym kompasie względem APM-a. Ustaw kopter na północ i zobacz na sztucznym horyzoncie czy także masz północ i czy zmienia się prawidłowo.
PS:Zacznij od podstawki, później będziemy myśleć co dalej.
Re: APM 2.8 Prośba o odczytanie loga
Na wejściu przewody są luźne lecz na wyjściu może troszkę naciągnięte ( poluzuję )
Filtrowanie baro mam włączone na 20Hz. Sprawdzałem w MP ( po kablu USB ) i tryby lotu przełączają się prawidłowo.
W trybie RTL nie ustawiałem wysokości powrotu, więc domyślnie wraca na wysokości na której się znajduje. Kompas był rozbierany ( zdjęcia we wcześniejszych postach ) i prawidłowo pokazuje. Kierunek kompasu i APMa jest taki sam a w MP ustawione ma roll 180. Jeżeli chodzi o kompas to sugerowałem się strzałką na płytce ( widoczna na zdjęciach ) i pokrywa się ona ze strzałką na obudowie. Dzisiaj sprawdzałem kompas ( po kablu USB ) i wychodzi że dobrze pokazuje choć w MP dryfował do ok 3 metrów . Chyba że problemem jest to, że ok 4m obok stoi dom w kształcie litery L. W ostatnim moim locie kopter na odległości ok 20m dwukrotnie wystrzelił do góry na ok 30m i tam zawisł na chwilę i nie miałem nad nim żadnej kontroli. Raz pamiętam że przełączyłem na stabilize i gaz na zero, wtedy po chwili zaczął spadać więc dodałem gazu aby nie zleciał. Mam filmik z tego lotu. Z podstawką będzie trochę problem bo już próbowałem ją szlifować aby się zmieściła lecz jeszcze dodatkowym utrudnieniem są punkty lutownicze na płytce. Jak bym dał APMa na górę to będę miał problem z akumulatorem gdyż pomiędzy płytki się nie zmieści a od spodu nie mam na obecną chwilę jak zamontować.
Filtrowanie baro mam włączone na 20Hz. Sprawdzałem w MP ( po kablu USB ) i tryby lotu przełączają się prawidłowo.
W trybie RTL nie ustawiałem wysokości powrotu, więc domyślnie wraca na wysokości na której się znajduje. Kompas był rozbierany ( zdjęcia we wcześniejszych postach ) i prawidłowo pokazuje. Kierunek kompasu i APMa jest taki sam a w MP ustawione ma roll 180. Jeżeli chodzi o kompas to sugerowałem się strzałką na płytce ( widoczna na zdjęciach ) i pokrywa się ona ze strzałką na obudowie. Dzisiaj sprawdzałem kompas ( po kablu USB ) i wychodzi że dobrze pokazuje choć w MP dryfował do ok 3 metrów . Chyba że problemem jest to, że ok 4m obok stoi dom w kształcie litery L. W ostatnim moim locie kopter na odległości ok 20m dwukrotnie wystrzelił do góry na ok 30m i tam zawisł na chwilę i nie miałem nad nim żadnej kontroli. Raz pamiętam że przełączyłem na stabilize i gaz na zero, wtedy po chwili zaczął spadać więc dodałem gazu aby nie zleciał. Mam filmik z tego lotu. Z podstawką będzie trochę problem bo już próbowałem ją szlifować aby się zmieściła lecz jeszcze dodatkowym utrudnieniem są punkty lutownicze na płytce. Jak bym dał APMa na górę to będę miał problem z akumulatorem gdyż pomiędzy płytki się nie zmieści a od spodu nie mam na obecną chwilę jak zamontować.