Witam,
mam problem ze swoim quadrokopterem a konkretnie podczas lotu cały czas obraca się w lewą stronę w osi Yaw.
Nie jestem pewny ale wydaje mi się, że jest to wina jednego z silników. Wrzucam logi do sprawdzenia.
Pozdrawiam,
Paweł
Link do paczki z logiem: https://megawrzuta.pl/download/544b1509 ... 6cd84.html
Problem z obracaniem w osi Yaw
Moderatorzy: moderatorzy2014, moderatorzy
-
SNEIJDERPL
- Posty: 5
- Rejestracja: sobota 04 lut 2017, 11:42
- Lokalizacja: Gdynia

Re: Problem z obracaniem w osi Yaw
Obraca w czasie lotu postępowego ?
... w czasie zawisu ?
... przy zmianie wysokości ?
W jakim trybie ?
Pisze z tel, wiec nie zaglądałem jeszcze do logów.
Wysłane z iPhone za pomocą Tapatalk
... w czasie zawisu ?
... przy zmianie wysokości ?
W jakim trybie ?
Pisze z tel, wiec nie zaglądałem jeszcze do logów.
Wysłane z iPhone za pomocą Tapatalk

Re: Problem z obracaniem w osi Yaw
Po odpowiedzi na powyższe pytania zacząłbym sprawdzać ustawienia aparatury i kalibrację w MP
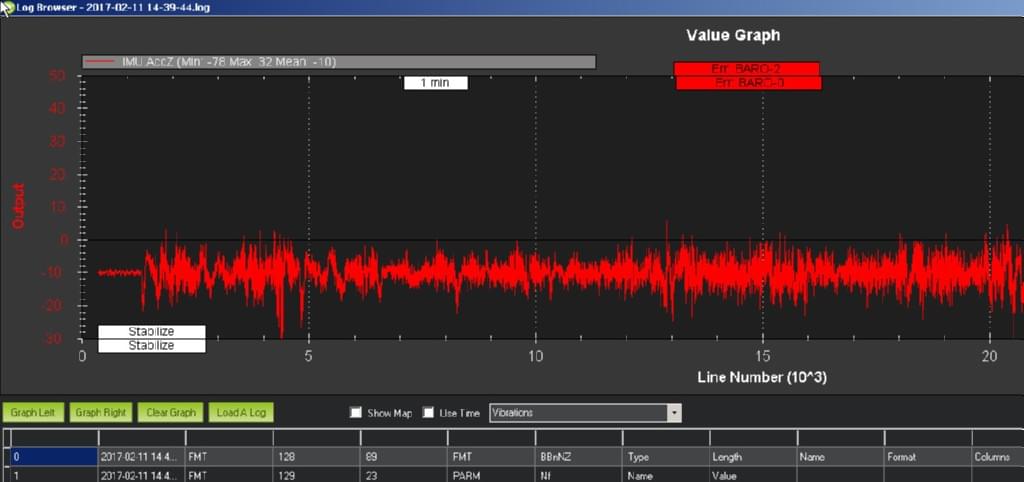
Komentarz do logu.
- Wibracje pod psem, do poprawienia
- baro wariuje od wibracji i gąbki
- sygnał z aparatury na czwartym kanale cały czas skacze od 1500 do 1800.
Aparatura :
Na wszystkich kanałach masz DZ 30 a na czwartym 40.
COMPASS_OFS_X -16
COMPASS_OFS_Y -29
COMPASS_OFS_Z 0
dziwna ta kalibracja kompasu.
No i co najważniejsze nie czytałeś lub olałeś ten temat
http://rc-fpv.pl/viewtopic.php?f=60&t=33916
Komentarz do logu.
- Wibracje pod psem, do poprawienia
- baro wariuje od wibracji i gąbki
- sygnał z aparatury na czwartym kanale cały czas skacze od 1500 do 1800.
Aparatura :
Na wszystkich kanałach masz DZ 30 a na czwartym 40.
COMPASS_OFS_X -16
COMPASS_OFS_Y -29
COMPASS_OFS_Z 0
dziwna ta kalibracja kompasu.
No i co najważniejsze nie czytałeś lub olałeś ten temat
http://rc-fpv.pl/viewtopic.php?f=60&t=33916
-
SNEIJDERPL
- Posty: 5
- Rejestracja: sobota 04 lut 2017, 11:42
- Lokalizacja: Gdynia
Re: Problem z obracaniem w osi Yaw
Witam,
jestem początkujący i jest to mój pierwszy projekt więc z góry przepraszam za jakieś głupie błędy ale tak to już bywa.
Quadrocopter obraca się cały czas, czyli podczas startu jak i lotu w trybie Stabillize, Althold i Loiter działają tragicznie i dron wyprawia co mu się podoba więc cały czas latałem na Stab. Muszę cały czas korygować obrót bo cały czas obraca go w lewą stronę. Posiadam Aparaturę Flysky FS-i6 więc nie potrafiłem jej skalibrować zgodnie z tym co jest omówione w temacie viewtopic.php?f=60&t=33916.
Kompas kalibruje mi ok a że wychodzą takie wyniki to już nie mam pojęcia. Co do czytania logów. Gdzie widzisz te skoki na kanale 4 bo nie mogę tego ogarnąć? Wibracje - słyszałem że dobre są jeśli nie przekracza w osiax X oraz Y od -3 do 3 a w Z od -5 do -15 ale poprawcie mnie jeśli się mylę.
jestem początkujący i jest to mój pierwszy projekt więc z góry przepraszam za jakieś głupie błędy ale tak to już bywa.
Quadrocopter obraca się cały czas, czyli podczas startu jak i lotu w trybie Stabillize, Althold i Loiter działają tragicznie i dron wyprawia co mu się podoba więc cały czas latałem na Stab. Muszę cały czas korygować obrót bo cały czas obraca go w lewą stronę. Posiadam Aparaturę Flysky FS-i6 więc nie potrafiłem jej skalibrować zgodnie z tym co jest omówione w temacie viewtopic.php?f=60&t=33916.
Kompas kalibruje mi ok a że wychodzą takie wyniki to już nie mam pojęcia. Co do czytania logów. Gdzie widzisz te skoki na kanale 4 bo nie mogę tego ogarnąć? Wibracje - słyszałem że dobre są jeśli nie przekracza w osiax X oraz Y od -3 do 3 a w Z od -5 do -15 ale poprawcie mnie jeśli się mylę.
Re: Problem z obracaniem w osi Yaw
Dobrze słyszałeś ale ty masz 2 x więcej.SNEIJDERPL pisze:Wibracje - słyszałem że dobre są jeśli nie przekracza w osiax X oraz Y od -3 do 3 a w Z od -5 do -15 ale poprawcie mnie jeśli się mylę.
https://images84.fotosik.pl/373/b8be7513c2ed5810.jpg
{kind=link}
Czy jest możliwość poprawy w osi z trymerami?
Bo jeżeli tak to problem tkwi w aparaturze i jej kalibracji w MP.
Masz gąbkę na baro i filtr 20hz?
RCIN C4SNEIJDERPL pisze:Gdzie widzisz te skoki na kanale 4
-
SNEIJDERPL
- Posty: 5
- Rejestracja: sobota 04 lut 2017, 11:42
- Lokalizacja: Gdynia
Re: Problem z obracaniem w osi Yaw
Jeśli chodzi o Baro to gąbka wyjęta, latałem cały czas bez filtra :( Co do wibracji to rzeczywiście jest coś nie tak i muszę to poprawić, nie mogłem ich poprawnie odczytać, może ktoś poradzić co do samej obsługi Log Browsera jak konkretnie ustawić sobie przedziały na osiach?? Na ten moment nie mogę sprawdzić wprowadzonych poprawek więc temat odświeżę dopiero po testach.
-
SNEIJDERPL
- Posty: 5
- Rejestracja: sobota 04 lut 2017, 11:42
- Lokalizacja: Gdynia
Re: Problem z obracaniem w osi Yaw
Witam ponownie,
przeprowadzone zmiany:
- filtr na baro + gąbka,
- nowe regulatory,
- wibroizolator pod APM,
https://www.easypaste.org/file/SL0VBevl/log.rar?lang=pl
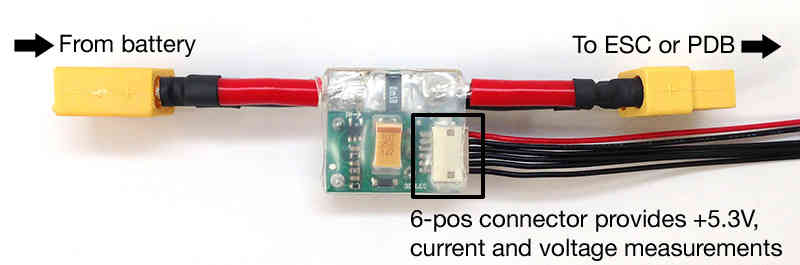
Winą obracania się w osi Yaw były regulatory obrotów. Posiadam kontroler APM 2.8, miałem zamontowane regulatory Emax BlHeli 30A. Po rozmowie z serwisantem zaproponowano mi zmianę regli i tak też zrobiłem (prawdopodobnie "gryzły" się z APM). Teraz nie ma problemów. Wszystko śmiga na tańszych z softem SimonK. Do swojej konstrukcji dodałem jeszcze wibroizolator i jeśli chodzi o drgania przenoszone ze śmigieł i silników to sytuacja się poprawiła ale nie jestem zadowolony w 100 %. Dodatkowo cały czas występuje problem ze spadkami napięć jeśli chodzi o zasilanie kontrolera lotu. Napięcie podaje z jednego ESC, reszta odpięte przewody +5 V. Proszę o jakieś sugestie związane z tym problemem. Jutro jeśli pogoda pozwoli kolejne testy. :)
przeprowadzone zmiany:
- filtr na baro + gąbka,
- nowe regulatory,
- wibroizolator pod APM,
https://www.easypaste.org/file/SL0VBevl/log.rar?lang=pl
Winą obracania się w osi Yaw były regulatory obrotów. Posiadam kontroler APM 2.8, miałem zamontowane regulatory Emax BlHeli 30A. Po rozmowie z serwisantem zaproponowano mi zmianę regli i tak też zrobiłem (prawdopodobnie "gryzły" się z APM). Teraz nie ma problemów. Wszystko śmiga na tańszych z softem SimonK. Do swojej konstrukcji dodałem jeszcze wibroizolator i jeśli chodzi o drgania przenoszone ze śmigieł i silników to sytuacja się poprawiła ale nie jestem zadowolony w 100 %. Dodatkowo cały czas występuje problem ze spadkami napięć jeśli chodzi o zasilanie kontrolera lotu. Napięcie podaje z jednego ESC, reszta odpięte przewody +5 V. Proszę o jakieś sugestie związane z tym problemem. Jutro jeśli pogoda pozwoli kolejne testy. :)
Re: Problem z obracaniem w osi Yaw
http://ardupilot.org/copter/_images/3DR ... or-top.jpgSNEIJDERPL pisze:Proszę o jakieś sugestie związane z tym problemem. Jutro jeśli pogoda pozwoli kolejne testy. :)
{kind=link}