Głuś, skoro jak piszesz roll ustawia sie dobrze, a masz w miare symetryczna rame - to przepisz te wartości po prostu do pitch i z głowy - przecież jeśli jest zachowana symetria to.wielkich roznic byc nie powinno.
Ja ogolnie nigdy nie używałem autotune a mam dobrze wypidowany kopter , ostatnio nawet znajomy mi pokazał jak to sprawdzic w logach - ktore ku mojemu zdziwieniu potwierdziły moje odczucia. Przepisz pidy z jednej.osi na drugą i sprawdz jak ci sie lata - ot cala "fizolofia"
Czarna hexa Pixhawk
Moderatorzy: moderatorzy2014, moderatorzy

Re: Czarna hexa Pixhawk
Opowiesz coś więcej o sprawdzeniu poprawności pidowania ?kuczy pisze:ostatnio nawet znajomy mi pokazał jak to sprawdzic w logach
Na co zwrócić uwagę w logach ?
Świat z góry wygląda lepiej 

Re: Czarna hexa Pixhawk
kuczy, przecież pisałem o tym że tak zrobię, ale nie zmienia to faktu że coś z tym autotune jest nie halo...
misiekkk, nakładasz na siebie wykresy ról i des roll, analogicznie inne osie. Czym bardziej się pokrywają tym lepiej. Najlepiej oglądać fragmenty w "przybliżeniu"
misiekkk, nakładasz na siebie wykresy ról i des roll, analogicznie inne osie. Czym bardziej się pokrywają tym lepiej. Najlepiej oglądać fragmenty w "przybliżeniu"
Re: Czarna hexa Pixhawk
Głuś, wiem, że pisałeś. Po prostu wg mnie autotune jest nadal w powijakach i nie za bardzo sie w 100proc nadaje na to aby bezgranicznie wierzyć tym wartościom jakie wpisuje.

Re: Czarna hexa Pixhawk
Także jestem tym zainteresowany jak misiekkk.kuczy pisze:znajomy mi pokazał jak to sprawdzic w logach
Re: Czarna hexa Pixhawk
kuczy, Jestem trochę innego zdania w AC 3.3.x działało super na każdej osi przynajmniej u mnie Jak się cofniesz XXX postów to bodajże na AC 3.2 była tragedia z autotune, a na wcześniejszych działało dobrze. Oni chyba biorą przykład z Windowsa że co druga dystrybucja im nie wychodzi 
maxiiii, przecież napisałem wyżej. ATT -> Roll + DesRoll itd.
PS. Właśnie pojawiła się aktualizacja do MP 1.3.45 i z nią AC V3.4.6
maxiiii, przecież napisałem wyżej. ATT -> Roll + DesRoll itd.
PS. Właśnie pojawiła się aktualizacja do MP 1.3.45 i z nią AC V3.4.6
Re: Czarna hexa Pixhawk
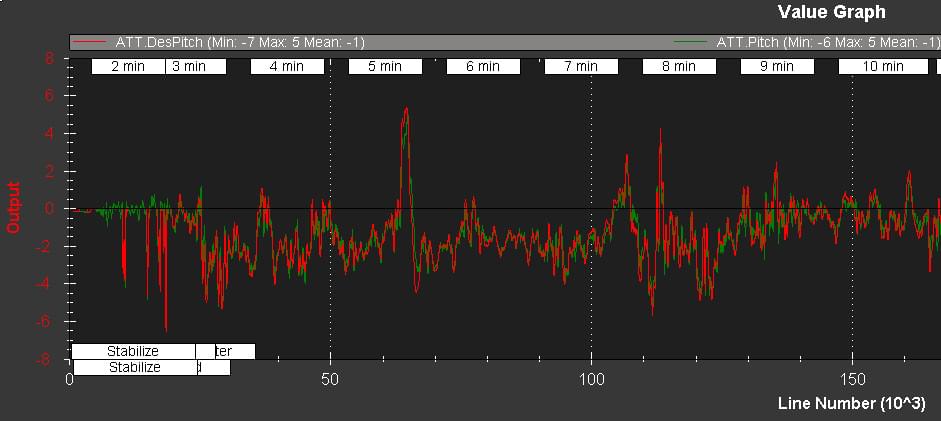
To daję przykład i jak go czytać?
Re: Czarna hexa Pixhawk
http://ardupilot.org/copter/docs/stabil ... flash-logsViewing the stabilize mode performance is best done by downloading a dataflash log from your flight, then open it with the mission planner and graph the ATT message’s Roll-In or DesRoll (pilot desired roll angle) vs Roll (actual roll) and Pitch-In or DesPitch (desired pitch angle) vs Pitch (actual pitch angle). These two should track well as shown below.
PS. Przede wszystkim sobie powiększ ten wykres
Re: Czarna hexa Pixhawk
Już zaczynam lekturę:)
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
Moja przesiadka z Nazy na Pixa już mnie kosztuje cztery śmigła  . Pogoda wczoraj lipa, na zewnątrz nie dało się wyjść, więc próba odbyła się w garażu, i niestety Hexa zawisła na Kompresorze do powietrza. Natychmiast przy próbie podniesienia ucieka w lewo, zrobiła to tak szybko że nie było szans na skontrowanie drążkiem. Oczywiscie brak było zasięgu GPS wiec uzbrojona została w trybie stabilnym, gdzie kompas i GPS są pomijane. Kolejne próby już bez odrywania jej od podłoża, wyraźnie pokazują że Hexa idzie na lewo, prawa strona podnosi się wcześniej . Nie jest to jakaś może ostra wywrotka ale na tyle mocne znoszenie ze na pewno w pomieszczeniu nie do opanowania. Nie wiem jaka skala tego była by na zewnątrz, czy Hexa poleci bokiem czy uda sie ją drążkami utrzymać i próbować trymować. Czy jest jakiś sposób ustawienia PID-ów już po takim podejrzeniu ze kopter ucieka w jedną stronę, by mu przed startem zrobić małą korektę ? Śmigła na 100% ustawione dobrze, bo Naza latała na nich idealnie, Silniki podpięte odpowiednio do PIX-a na MotoTest w MP silnik A to silnik nr 5 według schematu na stronie ArduPiolot-a a kolejne lecą zgodnie ze wskazówkami zegara. Jedyny zauważony drobiazg podczas tego testu to to że silnik E czyli nr.2 na teście nie uruchamia się z domyślnym ustawieniem 5% a dopiero po przełączeniu na 6% już wtedy startuje, ale nie myślę żeby to miało aż takie znaczenie. ECS skalibrowane. Czy ktoś mógł by bliżej opisać ustawienia w opcjach BASIC TUNING bo one cos chyba sie zmieniły w stosunku do poprzednich wersji softu MP, zastanawiam się cze nie wrócić do starszych wersji MP ?
. Pogoda wczoraj lipa, na zewnątrz nie dało się wyjść, więc próba odbyła się w garażu, i niestety Hexa zawisła na Kompresorze do powietrza. Natychmiast przy próbie podniesienia ucieka w lewo, zrobiła to tak szybko że nie było szans na skontrowanie drążkiem. Oczywiscie brak było zasięgu GPS wiec uzbrojona została w trybie stabilnym, gdzie kompas i GPS są pomijane. Kolejne próby już bez odrywania jej od podłoża, wyraźnie pokazują że Hexa idzie na lewo, prawa strona podnosi się wcześniej . Nie jest to jakaś może ostra wywrotka ale na tyle mocne znoszenie ze na pewno w pomieszczeniu nie do opanowania. Nie wiem jaka skala tego była by na zewnątrz, czy Hexa poleci bokiem czy uda sie ją drążkami utrzymać i próbować trymować. Czy jest jakiś sposób ustawienia PID-ów już po takim podejrzeniu ze kopter ucieka w jedną stronę, by mu przed startem zrobić małą korektę ? Śmigła na 100% ustawione dobrze, bo Naza latała na nich idealnie, Silniki podpięte odpowiednio do PIX-a na MotoTest w MP silnik A to silnik nr 5 według schematu na stronie ArduPiolot-a a kolejne lecą zgodnie ze wskazówkami zegara. Jedyny zauważony drobiazg podczas tego testu to to że silnik E czyli nr.2 na teście nie uruchamia się z domyślnym ustawieniem 5% a dopiero po przełączeniu na 6% już wtedy startuje, ale nie myślę żeby to miało aż takie znaczenie. ECS skalibrowane. Czy ktoś mógł by bliżej opisać ustawienia w opcjach BASIC TUNING bo one cos chyba sie zmieniły w stosunku do poprzednich wersji softu MP, zastanawiam się cze nie wrócić do starszych wersji MP ?

Re: Czarna hexa Pixhawk
Czyżbyscorpion10 pisze:ECS skalibrowane.
Walczyłem z kalibracją kilka wieczorów Emax 30A Blheli i porażka
Inne stare regulatory ruszyły od strzała.
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
Jak mogę pojedynczo je kalibrować ? Są to regle E300 z zestawu DJI. Ktoś wspominał na forum że kalibrując je pojedynczo, udało sie mu załatwić podobny problem. Ale nie wiem czy fizycznie odpinać kolejno regle i robić kalibracje, czy jest jakiś inny sposób np. Software-owy.
Re: Czarna hexa Pixhawk
Kalibracja czujników zrobiona? Horyzont jak się zachowuje na mission planner?
Mam wrażenie, że maszyna goni za jakimś dziwnie ustawionym horyzontem.
Mam wrażenie, że maszyna goni za jakimś dziwnie ustawionym horyzontem.
Syma X5C -> "Drewniak X5C"
S500 Black -> "Szlajacz" Black Snapper PRO L
GEPRC ZX5 190
I różne mikroby 1103, 1304...
S500 Black -> "Szlajacz" Black Snapper PRO L
GEPRC ZX5 190
I różne mikroby 1103, 1304...
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
Ale trybie Stabilnym, nie ma prawa za niczym gonić. Wtedy nie bierze udziału w sterowaniu kompas czy też GPS. Tak czy inaczej kalibracja jest wykonana, i Horyzont zachowuje się poprawnie, reaguje odpowiednio na przechylenia drona. Brak jakichkolwiek błędów w logach, poza połączeniem z Sat-kami, bo w garażu fix-a mi nie złapał niestety. Test był w trybie Stabilnym bo inaczej nie mogłem uzbroić silników. Utrzymując obroty silnika na pograniczu oderwania się koptera od ziemi, wyraźnie widac że unosi się wpierw prawa strona i dron kieruje się w lewo, a nawet dokładnie górny lewy róg. Przy pierwszym poderwaniu w całości od podłoża , od razu poleciała właśnie w lewą stronę i nie było szans na reakcję, straciłem niestety kilka śmigieł przez to :(. Może pogoda sie poprawi to spróbuje to zrobić na otwartej przestrzeni, bo nie wiem jak dalej się zachowa czy po podniesieniu wyżej będzie ją można skontrować i uytrzymać tak by PIDy ustawić, czy też w cholerę poleci dalej i przy tym jeszcze zrobi kreta na lewo, bo tak pewno będzie :(
Swoją drogą, niech ktoś powie czy ten sposób http://ardupilot.org/copter/docs/esc-calibration.html kalibracji ESC jest na obecną chwile prawidłowy, i tak powinno się kalibrować Regle w Pixhawk 2.4.8 ?? Sposób pokazany w linku u mnie jakos nie startuje. Bo coś wydaje mi się że jest już inaczej, a przynajmniej inaczej dla Pixhawk. Ja kalibracje uruchamiam z poziomu Mission Planner i już nie wiem jak jest dobrze ? a jak powinno być
Swoją drogą, niech ktoś powie czy ten sposób http://ardupilot.org/copter/docs/esc-calibration.html kalibracji ESC jest na obecną chwile prawidłowy, i tak powinno się kalibrować Regle w Pixhawk 2.4.8 ?? Sposób pokazany w linku u mnie jakos nie startuje. Bo coś wydaje mi się że jest już inaczej, a przynajmniej inaczej dla Pixhawk. Ja kalibracje uruchamiam z poziomu Mission Planner i już nie wiem jak jest dobrze ? a jak powinno być
Re: Czarna hexa Pixhawk
I skutki są już znane.scorpion10 pisze:więc próba odbyła się w garażu,
Podstawowy błąd początkującego.scorpion10 pisze:Utrzymując obroty silnika na pograniczu oderwania się koptera od ziemi,
To najlepsze wyjście.scorpion10 pisze:Może pogoda sie poprawi to spróbuje to zrobić na otwartej przestrzeni,
Jeszcze nie poleciałeś a już chcesz zmieniać pidy?scorpion10 pisze:tak by PIDy ustawić,
Jak nie jesteś pewny sprzętu to po po co startujesz.scorpion10 pisze:czy też w cholerę poleci dalej i przy tym jeszcze zrobi kreta na lewo, bo tak pewno będzie :(