Bzdurna dygresja , i nie wiem komu tu potrzebna. Może jak nie jesteś pewien czy jutro będziesz jeszcze żył , to nie idź dzisiaj do pracy. Brzmi to tak samo. Własnie po to chce zrobić próby by byc potem pewien. Jeżeli taki jesteś pewien wszystkiego, to może udziel jakieś pewnej konstruktywnej porady w tym temacie a nie zabawiaj się w mądrale.maxiiii pisze:Jak nie jesteś pewny sprzętu to po po co startujesz.
Czarna hexa Pixhawk
Moderatorzy: moderatorzy2014, moderatorzy
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
@maxii niezbyt pomocne te twoje wypowiedzi. Pisząc o utrzymaniu na pograniczu oderwania...... robiłem to już po pierwszej próbie lotu, by nie odrywając potem koptera od ziemi próbować zaobserwować jego pierwszy ruch i kierunek w którym próbuje się unieść, i czy on się powtarza zawsze w jedną stronę czy losowo. Więc nie jest to w tym przypadku błąd początkującego! Początki mam ale z Pixem, nie z lataniem i wiem jak należy do normalnego lotu poderwać kopter z ziemi.

Re: Czarna hexa Pixhawk
Uważam, że wręcz odwrotnie. Zwróciłem Ci uwagę na to co robisz źle. Powinieneś teraz pomyśleć i zanalizować swoje błędy.scorpion10 pisze:@maxii niezbyt pomocne te twoje wypowiedzi.
Już sama pierwsza próba startu w garażu jest złym pomysłem. Tak tego się nie robi.
Osobiście nie wpadłbym na pomysł latania swoim kopterem w pomieszczeniu a co dopiero jako pierwszy start.
Pomimo, że jestem pewny pierwszego startu to i tak wybieram ustronne miejsce z daleka od czegokolwiek co można uszkodzić.
To takie zboczenie BHP.

Re: Czarna hexa Pixhawk
Bo nie chciało ci się ich przeanalizowaćscorpion10 pisze:@maxii niezbyt pomocne te twoje wypowiedzi
To znaczy że robiłeś źlescorpion10 pisze:robiłem to już po pierwszej próbie lotu
I g... w ten sposób sprawdzisz jak masz wpływ ziemi i odbić strug od przedmiotów.scorpion10 pisze:by nie odrywając potem koptera od ziemi próbować zaobserwować jego pierwszy ruch i kierunek w którym próbuje się unieść
No to zrób to i wtedy analizuj - już było na forum diagnozowanych w pip kopterów które np. rzekomo przewracały się przy starcie bo operator bał się gazu.scorpion10 pisze: wiem jak należy do normalnego lotu poderwać kopter z ziemi.
To ze nie rozumiesz nie znaczy ze jest bzdurna a to że brzmi tak samo to niekoniecznie znaczy to samo, pomijając fakt że porównanie strzeliłeś tak od pały że nie wiadomo czy śmiać się czy płakać. A teraz przestań jojczeć że nie było głaskania po główce tylko kilka słów bolesnej prawdy i ogarnij dostarczone wskazówki bo jeżeli komuś na tym forum przysługuje zabawa w mądralę w temacie Pix/APM to właśnie maxiii'emu.scorpion10 pisze:Bzdurna dygresja , i nie wiem komu tu potrzebna. Może jak nie jesteś pewien czy jutro będziesz jeszcze żył , to nie idź dzisiaj do pracy. Brzmi to tak samo.
Ten wredny...
Re: Czarna hexa Pixhawk
Zgodzę się ale pod jednym warunkiem: skalibrowany prawidłowo akcelerometr.Ale trybie Stabilnym, nie ma prawa za niczym gonić...
Wszelkie stabilizacje używają żyroskopu i akcelerometru.
Jeśli akcelerometr skalibrujesz kładąc maszynę na nierównej powierzchni to ta będzie referencyjnym 0 stopni. Wtedy po starcie tryb stabilizacji wyrównuje do tego niby zera.
Przykładowo quad postawiony na pochyle 5 stopni, skalibrowany i te 5 stopni wychyłu będzie traktować jako horyzont czyli wyraźny dryf się pojawi.
W acro sam żyroskop pracuje (akcelerometr zbędny).
Syma X5C -> "Drewniak X5C"
S500 Black -> "Szlajacz" Black Snapper PRO L
GEPRC ZX5 190
I różne mikroby 1103, 1304...
S500 Black -> "Szlajacz" Black Snapper PRO L
GEPRC ZX5 190
I różne mikroby 1103, 1304...
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
Dobra..... dobra... dobra... ja przecież wszystkie wasz uwagi biorę do siebie i staram sie stosować wasze wskazówki. Ale napisałem ze chciałem ze względu na warunki pogodowe zrobić chociaż mini próbkę i padło na Garaż bo niecierpliwość nie pozwoliła mi czekać dłużej... Fakt ze to głupie i błąd ale mimo wszystko wykazało ze nie będzie łatwo  . Ale kontynując, muszę sie pożalić bo zadziwia mnie jednak maly fakt, a mianowicie czemu np. nie padnie odpowiedź na kilka moich myślę że dla Was prostych pytań. Za to jedziecie po mnie tylko jak widzicie błędy, ale spoko da się przeżyć. Pytałem mianowicie kilka postów wcześniej jak zrobić pojedynczą kalibracje Regli na Pix-ie, bo jakoś to da sie zrobić ale nikt nie podał jak technicznie, podałem też link z wątpliwym na dzisiejszy czas opisem kalibracji reglii, też nie usłyszałem żadnej informacji czy faktycznie jest to dobry sposób czy zły, więc nie wiem, czy nikt nie czy tez kazdy ma taka chęć pomocy ?. Z uplywem czasu sporo zmieniło się w tych rzeczach a ja zaczynam dużo poźniej i nie wiem jak traktować jakieś stare opisy który nie koniecznie dzisiaj mogą być aktualne, a brak o tym komentarza ze sie przedawniły. Podobnie widze że na wszystkich screenach MissionPlanner ma jakieś dodatkowe opcje, jak chociażby Terminal a obecna wersja która mam bo wcześniejszych nie miałem potrzeby instalować, takiej opcji nie ma i nie wiem czy mam skopaną wersje czy takie zmiany w aplikacji nastąpiły, i takich podobnych drobiazgów jest wiele.....
. Ale kontynując, muszę sie pożalić bo zadziwia mnie jednak maly fakt, a mianowicie czemu np. nie padnie odpowiedź na kilka moich myślę że dla Was prostych pytań. Za to jedziecie po mnie tylko jak widzicie błędy, ale spoko da się przeżyć. Pytałem mianowicie kilka postów wcześniej jak zrobić pojedynczą kalibracje Regli na Pix-ie, bo jakoś to da sie zrobić ale nikt nie podał jak technicznie, podałem też link z wątpliwym na dzisiejszy czas opisem kalibracji reglii, też nie usłyszałem żadnej informacji czy faktycznie jest to dobry sposób czy zły, więc nie wiem, czy nikt nie czy tez kazdy ma taka chęć pomocy ?. Z uplywem czasu sporo zmieniło się w tych rzeczach a ja zaczynam dużo poźniej i nie wiem jak traktować jakieś stare opisy który nie koniecznie dzisiaj mogą być aktualne, a brak o tym komentarza ze sie przedawniły. Podobnie widze że na wszystkich screenach MissionPlanner ma jakieś dodatkowe opcje, jak chociażby Terminal a obecna wersja która mam bo wcześniejszych nie miałem potrzeby instalować, takiej opcji nie ma i nie wiem czy mam skopaną wersje czy takie zmiany w aplikacji nastąpiły, i takich podobnych drobiazgów jest wiele.....
Re: Czarna hexa Pixhawk
tylko wtedy jak jest to niebezpieczne.scorpion10 pisze:Za to jedziecie po mnie tylko jak widzicie błędy,
A ja odpowiedziałem.scorpion10 pisze:Pytałem mianowicie kilka postów wcześniej jak zrobić pojedynczą kalibracje Regli na Pix-ie,
W nowszych wersjach nie ma terminala. Jest o tym informacja w instrukcji.scorpion10 pisze:Podobnie widze że na wszystkich screenach MissionPlanner ma jakieś dodatkowe opcje, jak chociażby Terminal
Nie martw się każdy "młody" tak już ma.:))
Właśnie sprawdziłem poprzednie posty i jakiś mi zaginął. Właśnie ten od regli.:(((
A więc nadrabiam.
Każdy regulator podłączasz do odbiornika osobno na 3 kanale.
aparatura gaz do dechy.
włączasz zasilanie regulatora i odbiornika.
czekasz na sygnał - wajcha gazu w dół.
Regulator piknie i zapisze nowe dane.
Ruszając gazem w aparaturze możesz teraz płynnie sterować obrotami silnika.
tak robisz wszystkie silniki.
potem kalibracja aparatury w MP. I już.
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
No właśnie i wielkie THX Już jestem o połowę mniej sflustrowany, bo szukałem tej twojej odpowiedzi i już nie sam nie wiedziałem czy problem ze wzrokiem czy jakiś bug ha ha ha... a pytać drugi raz nie chciałem bo znów bym oberwał. Przy okazji zapytam w trybie stabilnym jeżeli na uzbrojonych silnikach, jeśli przytrzymam z maksymalnym wychylenie drążek w osi Roll lub Pitch, nie ważne w ktora stronę, byle na maxa to po dwóch sekundach disarmuje mi silniki , bez względu na położenie wówczas Throtll-e , czy to normalny objaw, czy gdzieś jest zła konfiguracja ? W trybie AltHold czy Loiter tak się nie dzieje.
I jeszcze odnośnie kalibracji ESC, jeżeli na odbiorniku a jest to X8R kanał 3-ci leci po SBUS, to mam na czas kalibracji ESC prze-bindować odbiornik na PWM i podpiąć wtedy pod kanał trzeci Regla ?
I jeszcze odnośnie kalibracji ESC, jeżeli na odbiorniku a jest to X8R kanał 3-ci leci po SBUS, to mam na czas kalibracji ESC prze-bindować odbiornik na PWM i podpiąć wtedy pod kanał trzeci Regla ?
Re: Czarna hexa Pixhawk
Odnosnie kalibracji ESC - Tak na czas kalibracji ESC odłączasz odbiornik (SBUS) od kontrolera, zdejmujesz zworkę aby przejść do trybu równoleglego i albo kalibrujesz regulator po regulatorze kolejno (oczywiście podłaczając do kanału 3-go) albo podłaczasz do kanału 3-go odbiornika rozgałęziacz i kalibrujesz komplet regulatorów jednocześnie (jesłi masz sześciokrotny rozgałęziacz) lub np. w dwóch turach przy rozgałaziaczu min. 3-krotnym. Można tu sobie pomóc dostepnymi rynkowo rozgałęziaczmi "Y" stosowanymi np. do lotek.scorpion10 pisze:No właśnie i wielkie THX
I jeszcze odnośnie kalibracji ESC, jeżeli na odbiorniku a jest to X8R kanał 3-ci leci po SBUS, to mam na czas kalibracji ESC prze-bindować odbiornik na PWM i podpiąć wtedy pod kanał trzeci Regla ?
Trzymam kciuki za udane przejście poczatkowych trudności, Pixhowk + MP to naprawdę potężny zestaw.
Tomek
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
dzięki @tombrzus Hexa już wystartowała, ale jest obecnie jeszcze średnio-sterowna, bo między innymi spory problem jest z Throttle, gdyż w trybie STABILNYM to w ogóle rakieta i drążek gazu bardzo agresywnie reaguje już od dolnego położenia aż do samej góry i to w sumie może tak być i powinno, bo to taki tryb, ale za to w trybie A-HOLD jest znów tak że przepustnica od zera do około 50% nie reaguje właściwie w ogóle, i to tez OK bo tak powinno w sumie być bo silniki obracają się wtedy ze stała prędkością taką jak zaraz po uzbrojeniu, no ale później to już jest coś nie tak, bo wystarczy że z tych 50% czyli ze środkowego położenia drążka gazu, podniosę jeszcze przepustnice dosłownie kilka procent może max kolejne 5% wówczas silniki osiągają już w tak krótkim skoku pełną moc i przez to nie da się upilnować płynnego sterowania kopterm. brak normalnego płynnego wznoszenia i opadania , bo albo idzie jak strzała w górę i jak tylko spróbuje powstrzymać wznoszenie to ruch jest tak delikatny że silniki schodzą od razu z obrotów do pracy na wolnych obrotach i wtedy dron spada jak kamień w dół, i znów trzeba się ratować podnoszeniem ale taka szarpanina, skutkuje ciągłym szaleństwem góra-dół-góra-dół, bo brak jest tego płynnego środka. Jakie ustawienia powinienem zmienić, poprawić by rozszerzyć tą skale działania Throttle od tych 50% do 100% czyli od połowy do góry. czy to jest możliwe do ustawienia na RC mam 9XRpro czy też w ustawieniach aplikacji MP i Pixhawk trzeba to modyfikować ?
Re: Czarna hexa Pixhawk
Masz 2 miejsca gdzie wpływasz na pracę THR.
1.
http://ardupilot.org/copter/docs/ac_throttlemid.html - ustawienie midpoint. Zapewne nie masz zawisu przy środkowym położeniu THR w trybie Stab. Jest to o tyle istotne, że jak przejdziesz z jakiś wspomagaczy jak AHOLD, LOIT na STAB to pojawi się efekt rakiety/cegły w zależności co jest przestrzelone.
2.
To jak sam THR się zachowuje mają wpływ parametry w Throttle Accel:
http://ardupilot.org/copter/_images/Tun ... Change.png
Jeśli P zredukujesz do 0.5 to proporcjonalnie modyfikujesz I do poziomu 1.0.
Próby garażowe to dla własnego bezpieczeństwa odpuść sobie przy tak dużej maszynie. Nie bijemy ;) Dbamy o jak najniższy odsetek wypadków przy latadłach a mają one nam nieść przyjemność (na różnych płaszczyznach). Maszyna zupełnie inaczej zachowuje się 2m nad ziemią.
Znam ten strach przed startem i podciągnięciem na te pierwsze metry i to bardzo dobrze - sam rok temu zaczynałem.
1.
http://ardupilot.org/copter/docs/ac_throttlemid.html - ustawienie midpoint. Zapewne nie masz zawisu przy środkowym położeniu THR w trybie Stab. Jest to o tyle istotne, że jak przejdziesz z jakiś wspomagaczy jak AHOLD, LOIT na STAB to pojawi się efekt rakiety/cegły w zależności co jest przestrzelone.
2.
To jak sam THR się zachowuje mają wpływ parametry w Throttle Accel:
http://ardupilot.org/copter/_images/Tun ... Change.png
{kind=link}
Jeśli P zredukujesz do 0.5 to proporcjonalnie modyfikujesz I do poziomu 1.0.
Próby garażowe to dla własnego bezpieczeństwa odpuść sobie przy tak dużej maszynie. Nie bijemy ;) Dbamy o jak najniższy odsetek wypadków przy latadłach a mają one nam nieść przyjemność (na różnych płaszczyznach). Maszyna zupełnie inaczej zachowuje się 2m nad ziemią.
Znam ten strach przed startem i podciągnięciem na te pierwsze metry i to bardzo dobrze - sam rok temu zaczynałem.
Syma X5C -> "Drewniak X5C"
S500 Black -> "Szlajacz" Black Snapper PRO L
GEPRC ZX5 190
I różne mikroby 1103, 1304...
S500 Black -> "Szlajacz" Black Snapper PRO L
GEPRC ZX5 190
I różne mikroby 1103, 1304...
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
hmmm... No tak, tylko że jest jak wcześniej już pisałem, wiele opcji i opisów jest nie aktualnych i teraz własnie kolejny przykład:
Natomiast
Czy po takiej pojedynczej kalibracji Regli, nic nie stoi na przeszkodzie by użyć potem opcji kalibracji z poziomu Softu Mission Planner ?? czy tez to niepotrzebnie zmienią się ustawienia tych ESC i lepiej sobie to odpuścić ?
A tak w ogóle czy znalazł by się ktoś , kto lata na podobnym zestawie jak mój Pixhawk-2.4.8, ESC-DJI E300,2212/920KV, RC-9XRpro,Odbiornik-X8R. i podesłał by mi firmware na którym lata do Pix-a. I do jakiej wersji Softu MP musiał bym się wycofać, bym mógł wgrać ten firmware ? bo w obecnej wersji nawet nie ma takiej opcji :(. Że też akurat teraz musza wprowadzać takie zmiany w tym sofcie i ustawieniach, jak ja zaczynam zabawę z PIX i co rusz jest coś inaczej niż było.
Nie ma takich ustawień, przynajmniej w mojej wersji MP 1.3.45 jak THR_MID czy THR_MINSzper pisze:Masz 2 miejsca gdzie wpływasz na pracę THR.
1.
http://ardupilot.org/copter/docs/ac_throttlemid.html - ustawienie midpoint. Zapewne nie masz zawisu przy środkowym położeniu THR w trybie Stab. Jest to o tyle istotne, że jak przejdziesz z jakiś wspomagaczy jak AHOLD, LOIT na STAB to pojawi się efekt rakiety/cegły w zależności co jest przestrzelone.
Natomiast
Zmiana w tych ustawieniach, przynajmniej testując na biurku bez śmigiełek oczywiście, nie zmieniła zachowania mojego TH nadal się zachowuje w A-HOLD że przyrost właściwie całej mocy silników jest w zakresie drążka od 50% do 54% wychylenia przepustnicy. poza tym reakcja jest jakaś trochę jak by zbyt wolna np. na obniżenie obrotów silnika, obniżam Gaz a silniki reagują według mnie troszkę zbyt późno, ale to może moje tylko takie wrażenie , już sam nie wiem. Jak rozłożyć ten zakres od 50% do 100%, tak np. działało to w NAZA i nie mogę jakoś się przyzwyczaić że teraz ma to być na przestrzeni zaledwie 5%Szper pisze:2.
To jak sam THR się zachowuje mają wpływ parametry w Throttle Accel:
http://ardupilot.org/copter/_images/Tun ... Change.png
Jeśli P zredukujesz do 0.5 to proporcjonalnie modyfikujesz I do poziomu 1.0.
Czy po takiej pojedynczej kalibracji Regli, nic nie stoi na przeszkodzie by użyć potem opcji kalibracji z poziomu Softu Mission Planner ?? czy tez to niepotrzebnie zmienią się ustawienia tych ESC i lepiej sobie to odpuścić ?
A tak w ogóle czy znalazł by się ktoś , kto lata na podobnym zestawie jak mój Pixhawk-2.4.8, ESC-DJI E300,2212/920KV, RC-9XRpro,Odbiornik-X8R. i podesłał by mi firmware na którym lata do Pix-a. I do jakiej wersji Softu MP musiał bym się wycofać, bym mógł wgrać ten firmware ? bo w obecnej wersji nawet nie ma takiej opcji :(. Że też akurat teraz musza wprowadzać takie zmiany w tym sofcie i ustawieniach, jak ja zaczynam zabawę z PIX i co rusz jest coś inaczej niż było.
Re: Czarna hexa Pixhawk
Nie jest to mozliwe. Poszukaj w ustawieniach zaawansowanych.scorpion10 pisze:Nie ma takich ustawień, przynajmniej w mojej wersji MP 1.3.45 jak THR_MID czy THR_MIN
Po ustawieniu thr mid masz środek gimbala jako 50 % i w zaawansowanych trybach lotu oznacza to poziom, więcej na drążku to wyżej i odwrotnie. Wszystko proporcionalnie do ustawień w zakładce adwenced.
Znowu błąd - uaktywnij tryb rozszerzony.scorpion10 pisze:bo w obecnej wersji nawet nie ma takiej opcji
To nie ma sensu, albo jedno albo drugie.scorpion10 pisze:Czy po takiej pojedynczej kalibracji Regli, nic nie stoi na przeszkodzie by użyć potem opcji kalibracji z poziomu Softu Mission Planner ??
Jak przeczytasz cały wątek to otrzymasz większość odpowiedzi na twoje pytania.
http://rc-fpv.pl/viewtopic.php?f=60&t=33916
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
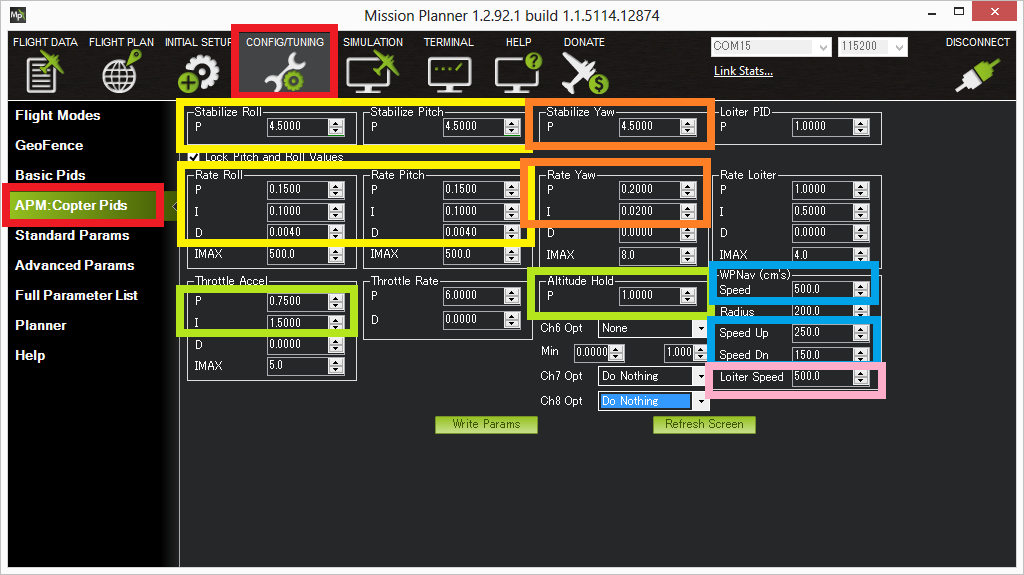
STAWIAM PIWO za screen-a w MP 1.3.45 z tymi ustawieniamimaxiiii pisze:Nie jest to mozliwe. Poszukaj w ustawieniach zaawansowanych.
Po ustawieniu thr mid masz środek gimbala jako 50 % i w zaawansowanych trybach lotu oznacza to poziom, więcej na drążku to wyżej i odwrotnie. Wszystko proporcionalnie do ustawień w zakładce adwenced.
Re: Czarna hexa Pixhawk
Są.scorpion10 pisze:bo cudów raczej nie ma,
-
scorpion10
- Posty: 138
- Rejestracja: czwartek 12 sty 2017, 22:19
- Lokalizacja: Sufczyn k/o Tarnowa
Re: Czarna hexa Pixhawk
No to by wskazywało że są, bo u mnie wygląda to tak. Więc od czego w takim razie zależne ?? Firmware czy Soft ESC czy jeszcze jakis inny problem, bo lekko irytujące są te problemy jak ktos chce przejść na Pixa.
Spróbuje obniżyć wersje firmware, i zobaczymy czy w tym różnica....
Nie da sie dwóch screenów dla porównania w jednym poscie dac wiec pisze jeden pod drugim [To że nie umiesz nie znaczy że nie da się - bo się da]
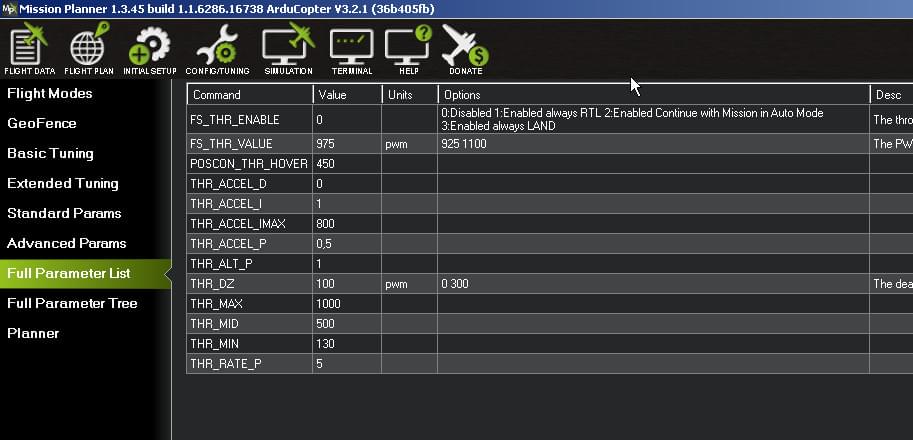
A drugi Screen po downgrade do firmware 3.2.1 wyjaśnia całe zamieszanie i obala mit cudów jednak cudów nie ma...... Tak własnie zbyd duże mieszanie w kodzie i w każdej wersji takie zmienia sieją zamieszanie, szczególnie wśród nas którzy dopiero zaczynamy.
Spróbuje obniżyć wersje firmware, i zobaczymy czy w tym różnica....
- Pix00.png (66.91 KiB) Przejrzano 3064 razy
A drugi Screen po downgrade do firmware 3.2.1 wyjaśnia całe zamieszanie i obala mit cudów
- Pix002.png (55.46 KiB) Przejrzano 2979 razy