Czarna hexa Pixhawk
Moderatorzy: moderatorzy2014, moderatorzy

Re: Czarna hexa Pixhawk
Raczej rotation NONE
Re: Czarna hexa Pixhawk
Moja maszyna ma duże problemy z trzymaniem wysokości. Copter to silniki EMAX MT3506, regulatory EMAX 25A BLHELI, PIXHAWK 2.4.8. Wcześniej wszystko działało super na APM.
Teraz jest tak, że po kilku minutach spokojnego latania, maszyna zaczyna opadać i nie chce reagować na throtle i nie jest to LAND, ani żaden failsafe, po prostu sama opada.
Już o tym pisałem w tym wątku http://rc-fpv.pl/viewtopic.php?f=60&t=38112 ale nie doczekałem się odpowiedzi.
Od tamtego testu postanowiłem wszystko posprawdzać jeszcze raz:
- kalibracja ESC (przez pixhawka),
- ustawienie RC_SPEED na 400,
- ustawienie AHRS_TRIM_X i Y na 0
- Dokładne skalibrowałem pomiar napięcia (aby wykluczyć możliwość zajechania aku),
- dokładnie wyważyłem model, z poziomicą na centerplacie w osi silników,
- bardzo dokładna kalibracja akcelerometry (również z poziomicą).
- Zrobiłem test synchronizację ESC przy odwróconym ciągu (śmigła zamienione, tak aby wciskały model do ziemi), ustawiłem 80% throtla na switchu i testowałem przełączając z 0 na 80, z 50 na 80 w różnym tempie. Wszytko chodziło stabilnie, nie widziałem, ani nie usłyszałem żadnych objawów braku synchronizacji.
Dzisiaj postanowiłem ustawić trimy, korzystając z bezwietrznej pogody. Model się podniósł, sprawia wrażanie stabilnego, przełączam stabilize, loiter, althold, wszystko gra. Sprawdzam trimy i po 6 minutach zaczyna się znowu opadanie, to ja go do góry, tryb loiter, on nic, tryb stabilize coś tam zareagował, za chwilę znowu opada, drążek na maksa i stabilize (przecież normalnie powinien po czymś takim wystrzelić) a on nic, żadnej reakcji, tylko leci w dół. Jak siadł to aż się wywrócił.
Znów oglądam logi i widzę ten sam objaw co tydzień temu, opada, copter podnosi throtleOut na maksa, a on opada. I najdziwniejsze w logach są RCOUT, bo model teoretycznie wyważony, a jest spora różnica w kanałach 1-4, za duża, silnik prawy-przód często pracował na maksa.
Ja obstawiam, że coś jest nie tak z regulatorami. Czy macie jakieś inne sugestie?
Kila logów poniżej:
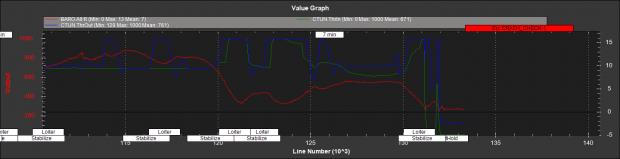
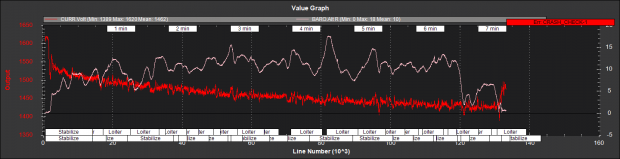
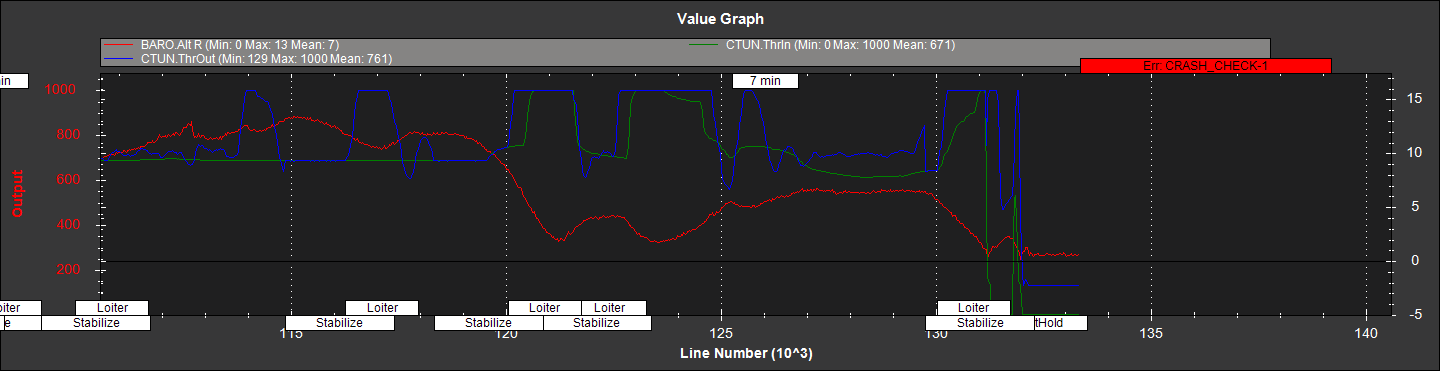
Wysokość i praca throtleIn i throtleOut
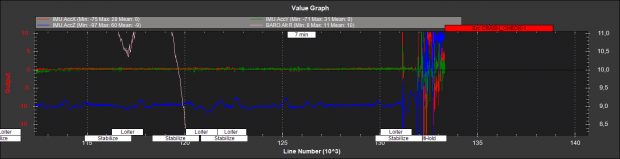
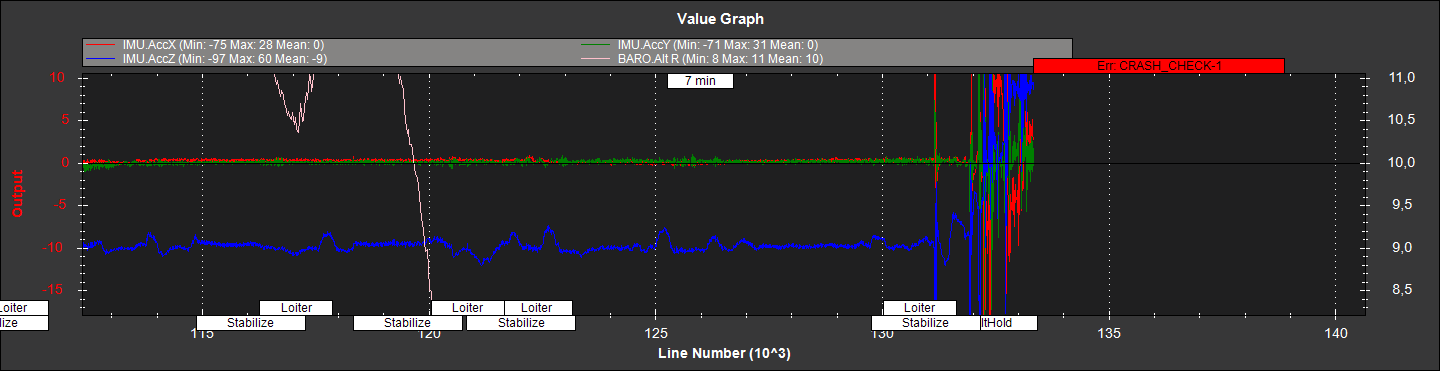
Poziom wibracji i wysokość
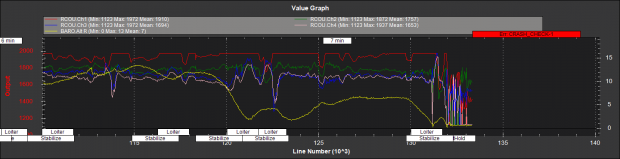
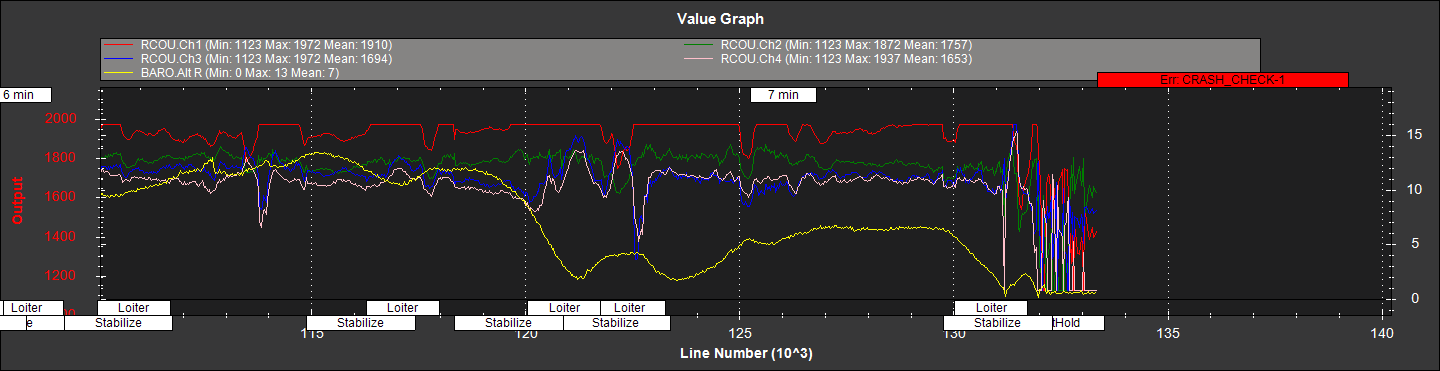
I tu najdziwniejszy wskażnik. Wysokość i praca silników RCOUT
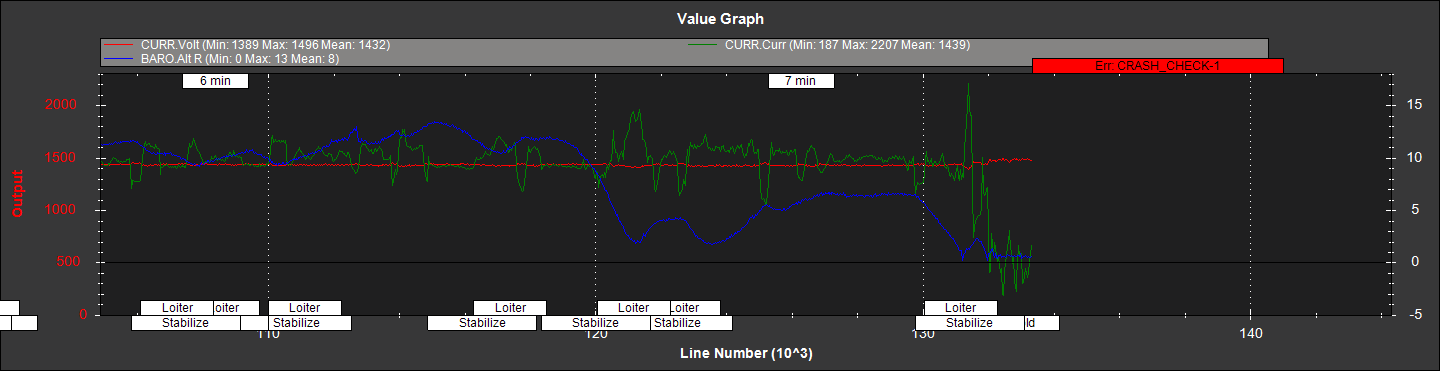
wysokość, napięcie na baterii i prąd pobierany
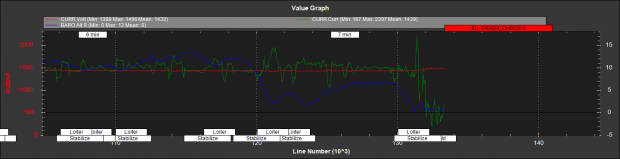
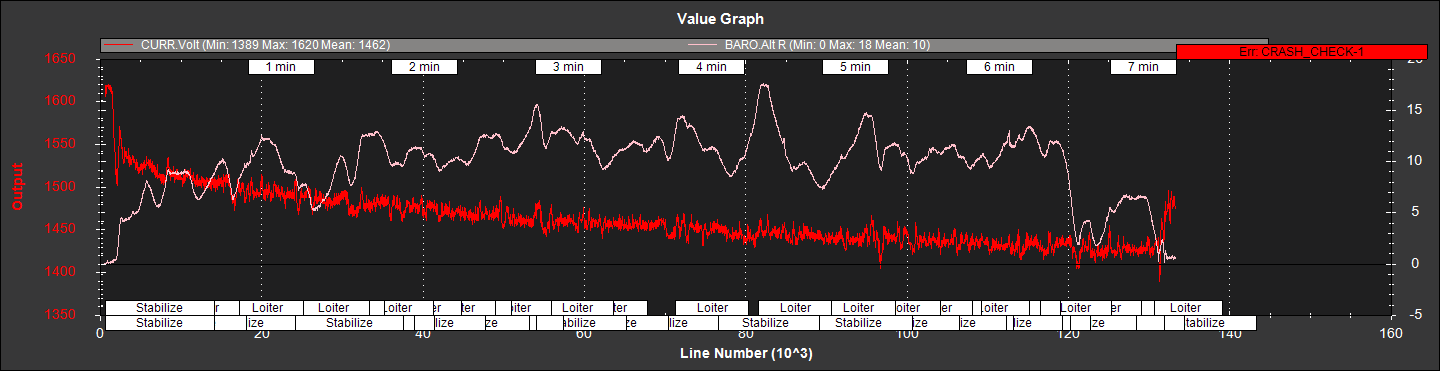
Wysokość i napięcie na baterii podczas całego lotu
Teraz jest tak, że po kilku minutach spokojnego latania, maszyna zaczyna opadać i nie chce reagować na throtle i nie jest to LAND, ani żaden failsafe, po prostu sama opada.
Już o tym pisałem w tym wątku http://rc-fpv.pl/viewtopic.php?f=60&t=38112 ale nie doczekałem się odpowiedzi.
Od tamtego testu postanowiłem wszystko posprawdzać jeszcze raz:
- kalibracja ESC (przez pixhawka),
- ustawienie RC_SPEED na 400,
- ustawienie AHRS_TRIM_X i Y na 0
- Dokładne skalibrowałem pomiar napięcia (aby wykluczyć możliwość zajechania aku),
- dokładnie wyważyłem model, z poziomicą na centerplacie w osi silników,
- bardzo dokładna kalibracja akcelerometry (również z poziomicą).
- Zrobiłem test synchronizację ESC przy odwróconym ciągu (śmigła zamienione, tak aby wciskały model do ziemi), ustawiłem 80% throtla na switchu i testowałem przełączając z 0 na 80, z 50 na 80 w różnym tempie. Wszytko chodziło stabilnie, nie widziałem, ani nie usłyszałem żadnych objawów braku synchronizacji.
Dzisiaj postanowiłem ustawić trimy, korzystając z bezwietrznej pogody. Model się podniósł, sprawia wrażanie stabilnego, przełączam stabilize, loiter, althold, wszystko gra. Sprawdzam trimy i po 6 minutach zaczyna się znowu opadanie, to ja go do góry, tryb loiter, on nic, tryb stabilize coś tam zareagował, za chwilę znowu opada, drążek na maksa i stabilize (przecież normalnie powinien po czymś takim wystrzelić) a on nic, żadnej reakcji, tylko leci w dół. Jak siadł to aż się wywrócił.
Znów oglądam logi i widzę ten sam objaw co tydzień temu, opada, copter podnosi throtleOut na maksa, a on opada. I najdziwniejsze w logach są RCOUT, bo model teoretycznie wyważony, a jest spora różnica w kanałach 1-4, za duża, silnik prawy-przód często pracował na maksa.
Ja obstawiam, że coś jest nie tak z regulatorami. Czy macie jakieś inne sugestie?
Kila logów poniżej:
Wysokość i praca throtleIn i throtleOut
Poziom wibracji i wysokość
I tu najdziwniejszy wskażnik. Wysokość i praca silników RCOUT
wysokość, napięcie na baterii i prąd pobierany
Wysokość i napięcie na baterii podczas całego lotu
Re: Czarna hexa Pixhawk
Wrzuć cały plik logu a nie foty.
Na 1 rzut oka masz przeciążoną maszynę albo nieskalibrowane regulatory.
Na 1 rzut oka masz przeciążoną maszynę albo nieskalibrowane regulatory.
-
RW

- Posty: 1420
- Rejestracja: czwartek 13 lut 2014, 00:09
- Lokalizacja: LUBOŃ CITY, MATZ/MCTR EPKS, BSP_WOJTYNIAK
Re: Czarna hexa Pixhawk
Oprócz tego, jeśli masz jeszcze tego APM to zczytaj parametry do pliku i po podłączeniu Pixa do MP zrób porównanie parametrów.
Jeśli silniki podczas zawisu chodzą nierówno to możesz mieć nie wyważoną maszynę - no ale to mówisz, że zrobiłeś. Możesz mieć również zwichrowane ramiona. Miałem tak w hexie, że podczas zawisu 3 silniki (obracające się w tym samym kierunku) pracowały szybciej od pozostałych. Najłatwiej stwierdzić czy takie coś występuje zawieszając maszynę w środku ciężkości i robiąc Motor Test. Stabilizacja wtedy nie działa, na silniki idzie tyle samo prądu. Jeśli wszystko jest dobrze, to kopter stoi w miejscu. Jeśli ma któreś ramiona zwichrowane, to zaczyna się obracać wokół osi YAW.
Jeśli silniki podczas zawisu chodzą nierówno to możesz mieć nie wyważoną maszynę - no ale to mówisz, że zrobiłeś. Możesz mieć również zwichrowane ramiona. Miałem tak w hexie, że podczas zawisu 3 silniki (obracające się w tym samym kierunku) pracowały szybciej od pozostałych. Najłatwiej stwierdzić czy takie coś występuje zawieszając maszynę w środku ciężkości i robiąc Motor Test. Stabilizacja wtedy nie działa, na silniki idzie tyle samo prądu. Jeśli wszystko jest dobrze, to kopter stoi w miejscu. Jeśli ma któreś ramiona zwichrowane, to zaczyna się obracać wokół osi YAW.
Rafał Wojtyniak
Re: Czarna hexa Pixhawk
Proszę bardzo: https://www.dropbox.com/s/jpjm178w57rrrqm/log.zip?dl=0shaggee pisze:Wrzuć cały plik logu a nie foty.
Na 1 rzut oka masz przeciążoną maszynę albo nieskalibrowane regulatory.
Regulatory kaliborawałem już kilka razy, osobno i wszystkie na raz przez pixhawka.
Czy maszyna jest przeciążona? Zawis jest na ok 600, dziwne jest, że ona świetnie latała do tej pory na apm i nagle się przeciążyła.
EDIT - scalenie
To już robiłem, nie ma w sumie istotnych różnicRW pisze:Oprócz tego, jeśli masz jeszcze tego APM to zczytaj parametry do pliku i po podłączeniu Pixa do MP zrób porównanie parametrów.
To jest ciekawy pomysł, w ten sposób to nawet się sprawdzi, czy regulatory równo pracują i czy nic nie jest zwichrowane. Spróbuję to zrobić.Jeśli silniki podczas zawisu chodzą nierówno to możesz mieć nie wyważoną maszynę - no ale to mówisz, że zrobiłeś. Możesz mieć również zwichrowane ramiona. Miałem tak w hexie, że podczas zawisu 3 silniki (obracające się w tym samym kierunku) pracowały szybciej od pozostałych. Najłatwiej stwierdzić czy takie coś występuje zawieszając maszynę w środku ciężkości i robiąc Motor Test. Stabilizacja wtedy nie działa, na silniki idzie tyle samo prądu. Jeśli wszystko jest dobrze, to kopter stoi w miejscu. Jeśli ma któreś ramiona zwichrowane, to zaczyna się obracać wokół osi YAW.

Re: Czarna hexa Pixhawk
Nie wiem jak te regulatory, ale kiedyś miałem regle które już od 3.7 per cela zaczynały stopniowo ograniczać moc na silnikach.
A wystarczyło inaczej pomachać drążkiem i na nowo ustawić od 3.5v
Wysłane z iPhone za pomocą Tapatalk
A wystarczyło inaczej pomachać drążkiem i na nowo ustawić od 3.5v
Wysłane z iPhone za pomocą Tapatalk
Re: Czarna hexa Pixhawk
Na drugim obrazku masz RCout czyli wyjściowy sygnał do każdego regulatora. Nr1 ma wartość maksymalną w kilku momentach (sygnał około 1950) a optymalnie powinno być 1400-1600

Re: Czarna hexa Pixhawk
Aż sam jestem ciekaw tych problemów z pixą :)
Osobiście latałem tylko Nazą V2 i A2 (nie swoim) i jakimiś biedronami moich dzieciaków.
Ciekawa sprawa :)
Osobiście latałem tylko Nazą V2 i A2 (nie swoim) i jakimiś biedronami moich dzieciaków.
Ciekawa sprawa :)
DJI Mavic Pro - DJI Inspire 1Pro X5 - DJI S1000 - Canon - Sony - Panasonic - Sigma - HiTec - DJI - 3DR - Align
Re: Czarna hexa Pixhawk
Pix nie robi problemów. Gdybyś w tym przypadku podłączył Nazę to byś się nawet nie dowiedział w czym tkwi problem.

Re: Czarna hexa Pixhawk
Ja się poddałem z EMAX 30A BLHELInotgroove pisze:regulatory EMAX 25A BLHELI,
Tu jest o tym więcej.
Re: Czarna hexa Pixhawk
Też tak myślałem, bo patrząc na wykres napięcia na baterii to w obu przypadkach maszyna zaczyna opadać, gdy napięcie spada poniżej 3.6 na celę. Tylko, że w tych regulatorach mam dostępne tylko opcje 2.8, 3.0, 3.2 i off (ustawione jest na 3.0v), więc daleko do 3.6vwrepinski pisze:Nie wiem jak te regulatory, ale kiedyś miałem regle które już od 3.7 per cela zaczynały stopniowo ograniczać moc na silnikach.
A wystarczyło inaczej pomachać drążkiem i na nowo ustawić od 3.5v
No właśnie, chyba tak się skończy, tylko walałbym mieć jakąś prawie pewność, że problem stanowią regulatory i nie wydawać 200zł w ciemno.Piotrowy pisze:Ja się poddałem z EMAX 30A BLHELInotgroove pisze:regulatory EMAX 25A BLHELI,. Za cholerę nie mogłem ich skalibrować. Stare Turnigy z Simonk idą ładnie.
Re: Czarna hexa Pixhawk
Może to ktoś od nas?szaman89 pisze:Rozkminił ktoś może automatyczne chowanie i rozkładanie podwozia przy określonej wysokości modelu? Szukam informacji o tym ale z marnym skutkiem.
http://morfeo1.republika.pl/Podwozie.html

Re: Czarna hexa Pixhawk
Na filmiku gość dokładnie wyjaśnia jak coś takiego zrobić.shaggee pisze: Może to ktoś od nas?
http://morfeo1.republika.pl/Podwozie.html
Czekam na baro z Ali i spróbuję jednak to uruchomić. Zobaczymy co to jest warte.
Po złożeniu zapytania na forum ardupilota o możliwość wprowadzenia takiej funkcji uzyskałem odpowiedź, że podejmowane już były próby testowania takiej opcji jednak z marnym skutkiem i efekty nie były wystarczająco dobre by je zaimplementować w soft.

Re: Czarna hexa Pixhawk
dyskutowałem z autorem odnośnie tego rozwiązania. napisał, że błąd baro jest rzędu 1m. problem pojawia się jedynie gdy miejsce lądowania ma być wyżej niż startu bo wtedy nogi się nie rozłożą. dla tego powinna być oprócz tego możliwość uruchomienia podwozia z rc.
Moje zabawki: Syma X5SW ORANGE + TX MOD | Syma X8C MODDED | DJI F450 NaZa-GULL - RIP. | TBS Discovery NAZA-GuLL | DJI Phantom 3 ADV - SPRZEDANY | DJI Phantom 4 PRO
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
Re: Czarna hexa Pixhawk
Doliczcie zmiane cisnienia jak sie front przesunie