
zabieram się powoli za ten temat zobaczę co wyjdzie
w tej chwili rozbijam się o kilka rzeczy
1 wolne serwo/a - jak by kotoś mógł mi doradzić jakieś fajne szybkie serwa ?
2 rozdzielczość PWM w tej chwili jest ustawione na 125kroków mam nadziej że uzyskam dużo więcej
i w sumie tyle
reszta do zrobienia z czasem , zacząłem pierwsze testy
powstał kontroler w wersji testowej , ( będę się starał uzupełniając zmiany na bieżąco )
parametry techniczne kontrolera (w tej chwili) potem cześć ulegnie zmianie na pewno na lepsze
rozdzielczość PWM - 4800 kroków w zakresie 900-2100us na każdy kanał
częstotliwość odświeżania 50-400hz ( z skokiem co 20hz)
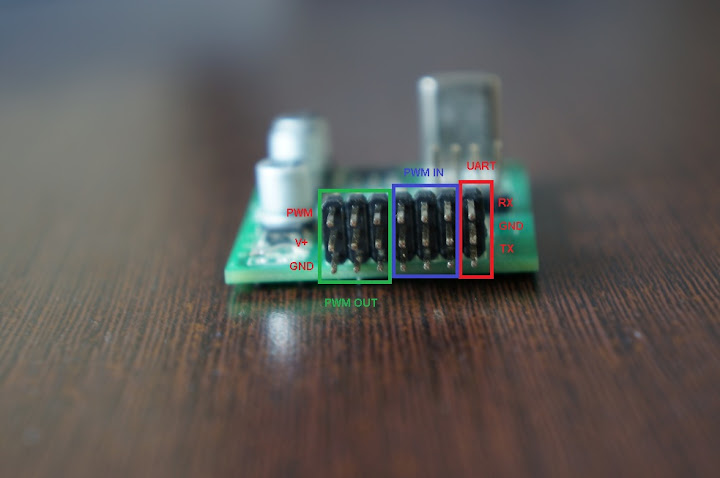
3 wyjscia PWM
3 wejscia PWM
pierwsze testy
----------------- podłączenie ---------------
do konfiguracji będzie potrzebny uart polecam układy typu ftdi
zasilenie kontrolera - od 5 do 12V z dowolnego złącza oczywiście oprócz złącza uart tam proszę nie podłączać zasilania
----------------- montaż kontrolera -------
kontroler należy zamontować na półce osi pitch tam gdzie montujemy aparat
(tak wiem trochę nie poręczne bo dużo kabli ale proszę pamiętać że to prototyp )
kontroler musi być zamontowany elementami do góry oraz pinami do tyłu
soft w pierwszej wersji
soft w wersji bardzo pre
http://telnet.r-ce.pl/quadro/gimbal/gromit.zip
w paczce są 3 pliki
gimbal_firmware.bin - plik binary z softem
gimbalcfg.exe - program do konfiguracji
uploader.exe - program do ładowania softu
tak należy ustawić uploader

aby wrzucić soft należy założyć zworkę podłączyć zasilanie po około 1-2sek można ściągnąć zworkę

w programie do aktualizacji ustawiamy parametry jak powyżej
wybieramy plik z softem Plik > otwórz.. > gimbal_firmware.bin następnie klikamy programuj
"guzik sprawdź jeszcze nie działa
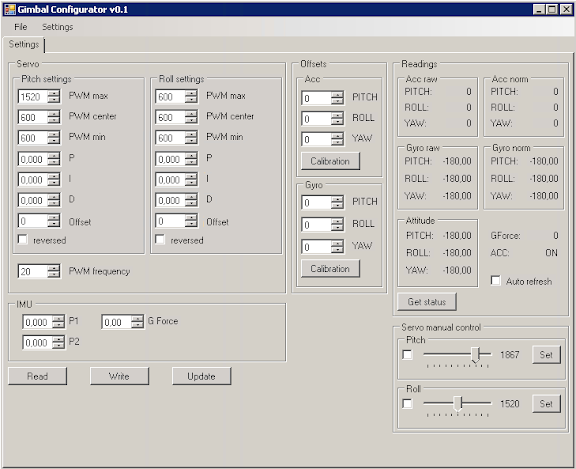
----- konfigurator -----
kalibracja czujników
płytkę położyć na wypoziomowanej powierzchni nacisnąć guzik calibration w ACC poczekać aż w pasku statusu program potwierdzi kalibracje , następnie wykonać to samo dla GYRO , następnie naciskamy guzik Read jeżeli offsety się zmieniły zapisujemy je klikając Write
...
---------------- AKTUALNE OPROGRAMOWANIE -------------
http://telnet.r-ce.pl/quadro/gimbal/gromit.zip - 05-10-2012
http://telnet.r-ce.pl/quadro/gimbal/gromit_0.4.zip - 10-10-2012



