
Mam problem z uruchomieniem w moim gimbalu na kontrolerze BGC 2.2 sterowania osi pitch na potencjometrze aparatury przez APM 2.8.
Moja płytka BGC wygląda tak:
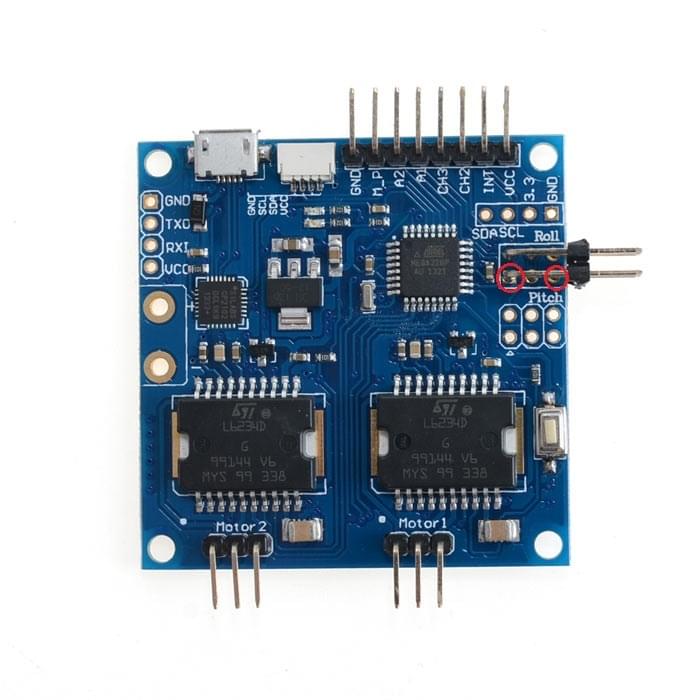
Wpiąłem się w sygnał i masę przy wtykach pitch tak jak zaznaczyłem na zdjęciu.
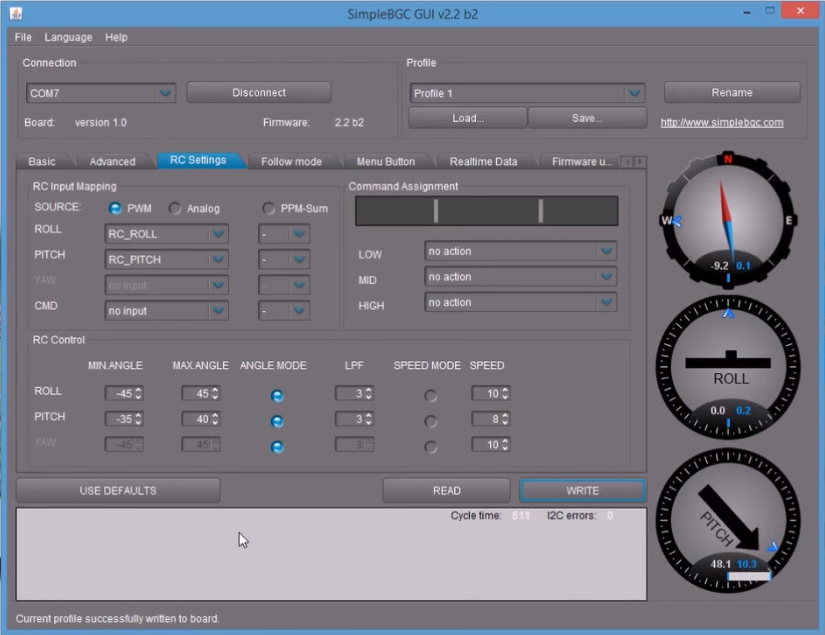
GUI ustawione tak:
W Mission Plannerze na kanale 6 mam ustawione sterowanie potencjometrem. Sam MP pokazuje pięknie sygnał na kanale 6 przy poruszaniu potencjometrem na aparaturze więc tu jest ok.
W zakładce "Camera Gimbal" mam ustawione zgodnie z poradnikami:

(min i max mam zgodnie z zakresem kanału 6 czyli 1100-1900)
W "Extended Tuning" żadna funkcja nie jest przypisana do kanału 6.
Do płytki APM-a wpiąłem się w sygnał i masę pod złącze A11. Wpinając się w sygnał i masę w A8 i przestawiając tilt na RC8 w Mission Plannerze efekt jest taki sam - brak efektu.
Nie wiem już gdzie szukać problemu. GUI BGC nie widzi ruchu potencjometrem w zakładce "Realtime Data".
Ktoś posiada może ten tandem i poradził sobie z kontrolą osi pitch przez APM-a albo wie gdzie jeszcze można poszukać rozwiązania?

