rud88 pisze:Bardzo proszę o fachową ocenę padawana Rurka.
Tylko bez takich
Ja tam komentuje co widzę, bez fachowości....ale powiem Ci jedno - widziałem lepsze filmy bez gimbala niż ten z Twoim - przecież on w ogóle nie stabilizuje panoramy góra-dół!!!! tylko skokowo, jak w banalnych gimbalkach serwowych z poprzedniej epoki (heh dwa lata temu i sterowanie luźnymi tanimi serwami prosto z FC) przed regulacją....
Koledzy dobrze radzą - najpierw kopter sam z siebie ma nie wprowadzać wibracji tak aby dało się oglądać film z kamerki na sztywno przyczepionej do ramy i dopiero potem zabieraj się za strojenie gimbala który IMO w Twoim wypadku jest kompletnie rozstrojony
Uwagi przyjmuję z pokorą i już się zabieram za wyważanie śmigieł i silników.Niesety nie łatwo jest wyważyc śmigła DJI / już próbowałem / mają z jednej strony owalne otwory i niestety prawie niemożliwe jest wycentrowanie ich na stożkach.Liczyłem że wibracje zostaną max. zredukowane przez gumowe damperki,widziałem gdzieś opis tego jako "Jello Killer"ale niestety się przeliczyłem, pozostaje tylko praca od podstaw i tego się trzymajmy.
To i ja się dołączę do grona posiadaczy tegoż gimbala oczywiście bez jednej śrubki ze zwichrowaną ramkką :). Pytanie mam jednak następujące. Po podłączeniu wszystkiego gimbal się startuje kalibruje po czym silnik na osi tilt brumi buczy i drży z wysoką częstotliwością. Poza tym samo działanie przechyłów jest dobre no ale wiadomo że nie da się nic nagrać z taką wibracją. Gdzie leży przyczyna? Czy silnik walniąty czy może kwestia ustawienia przez GUI czegoś? Próbowałem dostać się przez GUI do niego ale po zainstalowaniu ftdi i w sumie poprawnym wykryciu nie chce mi sie GUI połączyć z gimbalem. Arduino go widzi.
Ja również też tak miałem, oba silniki mi lekko drżały i nagle zjawisko ustało nie wiem co pomogło, czy skrócenie przewodów od silników i uchwycenie ich do konstrukcji czy skręcenie luźnych przewodów od sensora i też przymocowanie do konstrukcji a może przyklejenie na cienkiej taśmie sensora/wcześniej była grubsza/ na środku dolnej płytki.
Niestety wgranie nowego softu 049 nie tego najnowszego nie powiodło się / kol.qlf wyjaśnił mi jak to się robi z konsoli Arduino / .Konsola potwierdza prawidłowo wykonaną operację ale z GUI 049 nie mogę połączyć się z kontrolerem, natomiast jak użyję GUI 048 to mogę.
Oj ten RCtimer, Tak więc może spróbuj manewrów które opisałem.
Czy któryś z użyszkodników tematowego gimbala mógł by napisać jakie wartości pidów ma ustawione jakie zasilanie.
Myślę że baza takich ustawień pomogła by wielu nowym właścicielom takich bimbalków
Wgrałem najnowszy soft i w pochylaniu kamery w dół pod dowolnym kątem jest on zdecydowanie lepszy od tego załadowanego od producenta. Gimbal nie robi dziwnych przechyłów i fajnie się operuje suwakami w programie konfiguracyjnym przy włączonym gimbalu i od razu widać efekty ustawień. ALE zrobił się problem taki, że silnik w osi roll mimo dokładnego wyważenia ma drobne wibracje i się grzeje. Przy pierwotnym sofcie nie było takich problemów mimo niedokładnego wyważenia kamery. Wszystko w pewnym zakresie działało bardzo płynnie.
Czy mogę prosić kolegów, którym udało się opanować ten problem o podanie dobrych ustawień.
Zmniejsz power i zajrzyj do wątku o BruGi...tam mamy co najmniej ze dwa algorytmy PIDowania...jedna rzecz na pewno jest ważna - niektóre parametryz softu 48 trzeba podzielić przez 10 i takie wpisać do najnowszego....zajrzyj do przyklejonego wątku.
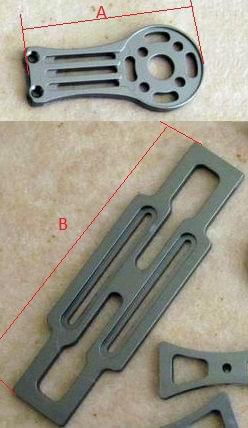
Panowie przepraszam że tak wtrącam się ale projektuje właśnie swój gimbal i potrzebuje dwóch wymiarów czy można was prosić o sprawdzenie tych dwóch A i B? z góry dziękuje.
Dziękuje panowie, bardzo przydatna informacja. Myślałem że te ramiona są sporo dłuższe ale jak widać się myliłem. Jak już wymodzę swój gimbal na pewno się pochwale Pozdrawiam
Czy ktoś już może wymieniał łożyska w silnikach z zestawu i mógł by podać ich wymiary, bo moje to od nowości maja chyba jakieś kwadratowe kulki.
Przymierzam się do wymiany ale najpierw nim uszkodzę wyjmując stare chciał bym mieć nowe w gotowosci
Hej mam pytanie. Gdy gimbal się trzęsie w locie, ale wtedy gdy jest wiatr, to pewnie chodzi o same mocowanie, czyli te gumki, wiatr nim miota? Wypchałem je zatyczkami ale dalej to w sumie miękkie.