
oś Z to oś Z - zgodna z wektorem przysp ziemskiego, tak jak napisałeś.
Natomiast wytłumacz mi co oznacza odczyt parametru [YAW] z adc ?
MultiWii + MPU6050
Moderatorzy: moderatorzy2014, moderatorzy
Re: MultiWii + MPU6050
infekcja FPV postępuje w zastraszającym tempie...

Re: MultiWii + MPU6050
[YAW] to synonim trzeciej osi i ma wartość 2.
Roll = 0, Pitch = 1, Yaw = 2.
Ot tyle, po prostu jest to stała o wartości 2.
A czemu używają tego w odniesieniu do ACC - nie wiem, chyba z rozpędu. Zresztą przy MAG też są używane synonimy ROLL,PITCH,YAW, a mag tez ma osie X,Y,Z.
Roll = 0, Pitch = 1, Yaw = 2.
Ot tyle, po prostu jest to stała o wartości 2.
A czemu używają tego w odniesieniu do ACC - nie wiem, chyba z rozpędu. Zresztą przy MAG też są używane synonimy ROLL,PITCH,YAW, a mag tez ma osie X,Y,Z.
Pzdr. -----MIŚ-----
Re: MultiWii + MPU6050
To czemu oś YAW "nadgania" odczyty z gyro i tak jak wyżej wspomniałem - przy pomylonej "biegunowości" odczyty się rozjeżdżają?
No przecież nie bierze się to z kosmosu tylko z odczytu ACC. Wiadomo że ACC ma osie takie normalne trzy w układzie kartezjańskim prostopadłe do się a obrót YAW jest wyliczany z osi X/Y ale tak czy siak jest.
a obrót YAW jest wyliczany z osi X/Y ale tak czy siak jest.
No przecież nie bierze się to z kosmosu tylko z odczytu ACC. Wiadomo że ACC ma osie takie normalne trzy w układzie kartezjańskim prostopadłe do się
infekcja FPV postępuje w zastraszającym tempie...
Re: MultiWii + MPU6050
Nie z kosmosu ani ACC tylko z magnetometru.
A ciągłe kręcenie się osi YAW na postoju bierze się dryftu żyroskopu. I tylko MAG jest w stanie to skompensować.
A po za tym wyobraź sobie akcelerometr kręcący się wokół swojej pionowej osi. I teraz powiedz mi gdzie w tym jest jakieś przyspieszenia w osiach X,Y Z ? Tylko nie wyjeżdżaj mi tu z jakimiś siłami odśrodkowymi
A ciągłe kręcenie się osi YAW na postoju bierze się dryftu żyroskopu. I tylko MAG jest w stanie to skompensować.
A po za tym wyobraź sobie akcelerometr kręcący się wokół swojej pionowej osi. I teraz powiedz mi gdzie w tym jest jakieś przyspieszenia w osiach X,Y Z ? Tylko nie wyjeżdżaj mi tu z jakimiś siłami odśrodkowymi
Pzdr. -----MIŚ-----

Re: MultiWii + MPU6050
No właśnie jestem pewny (co potwierdził Miś) bo jakbym nie był to napisał bym "chyba"Rurek pisze:Pewien jesteś czy zgadujesz?
A wynika to z tego że jak obracasz koptera to nie ma przyspieszenia liniowego w żadnej z osi a to mierzy akcelerometr.
Tylko żyroskop mierzy prędkość kątową ale jak wiadomo ma to dryf, który można zniwelować magnetometrem.
Pozdrawiam Sławek
... jeśli nie wiesz co robić, nabieraj wysokości. Jeszcze nikt nie zderzył się z niebem...
... jeśli nie wiesz co robić, nabieraj wysokości. Jeszcze nikt nie zderzył się z niebem...
-
ClassAxion
- Posty: 32
- Rejestracja: piątek 06 lut 2015, 20:02
Re: MultiWii + MPU6050
MPU jest nienaruszone. Lecz o ile dobrze pamiętam to były chwile kiedy GYRO działało.
Mam jeszcze MAG HMC5883 którego odłączyłem bo model miał przeskok w YAWie, wyglądało to tak jakby miał obszar 0-260 stopni i po ~260 przeskakiwał na 0.
Czy silniki MUSZĄ kręcić się w taką stronę jak jest na
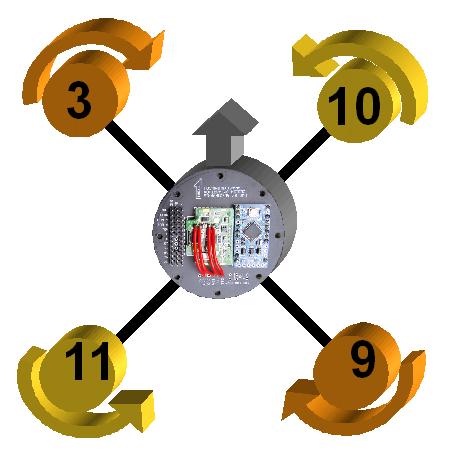
(http://www.multiwii.com/wp-content/uplo ... DX_328.jpg)
Bo bo moim przypadku jest odwrotnie i chyba będę musiał przysiąść i je przelutować
#Edit
Podłączyłem MAG, copter po podłączeniu znajduje się na ~180 stopni, gdy go ruszę o np. 90 to dobrze się obróci ale zaraz wraca na to ~180 stopni.
Mam jeszcze MAG HMC5883 którego odłączyłem bo model miał przeskok w YAWie, wyglądało to tak jakby miał obszar 0-260 stopni i po ~260 przeskakiwał na 0.
Czy silniki MUSZĄ kręcić się w taką stronę jak jest na
(http://www.multiwii.com/wp-content/uplo ... DX_328.jpg)
Bo bo moim przypadku jest odwrotnie i chyba będę musiał przysiąść i je przelutować
#Edit
Podłączyłem MAG, copter po podłączeniu znajduje się na ~180 stopni, gdy go ruszę o np. 90 to dobrze się obróci ale zaraz wraca na to ~180 stopni.

Re: MultiWii + MPU6050
Tak, muszą. Dokładnie w tą stronę.ClassAxion pisze: Czy silniki MUSZĄ kręcić się w taką stronę jak jest na
Re: MultiWii + MPU6050
Mag'a trzeba najpierw skalibrować. No i też musi mieć ustawioną odpowiednią orientację w konfiguracji.ClassAxion pisze:Podłączyłem MAG, copter po podłączeniu znajduje się na ~180 stopni, gdy go ruszę o np. 90 to dobrze się obróci ale zaraz wraca na to ~180 stopni.
Pzdr. -----MIŚ-----
-
ClassAxion
- Posty: 32
- Rejestracja: piątek 06 lut 2015, 20:02
Re: MultiWii + MPU6050
W MultiWiiConf tak? Po kalibracji jest tak samo.miś pisze:Mag'a trzeba najpierw skalibrować. No i też musi mieć ustawioną odpowiednią orientację w konfiguracji.ClassAxion pisze:Podłączyłem MAG, copter po podłączeniu znajduje się na ~180 stopni, gdy go ruszę o np. 90 to dobrze się obróci ale zaraz wraca na to ~180 stopni.
Da się latać z tym dryfowaniem bez MAG'a? Bo chciałbym zrobić jakiś testowy lot ale nie taki że będę musiał go od nowa składać
Re: MultiWii + MPU6050
Oczywiście że się da. Ale jak masz nie ustawiony, albo źle ustawiony MAG to lepiej go odłącz, bo latając z nim będziesz miał problem z notorycznym obracaniem quada w jakimś bliżej nieokreślonym kierunku.
Pzdr. -----MIŚ-----
-
ClassAxion
- Posty: 32
- Rejestracja: piątek 06 lut 2015, 20:02
Re: MultiWii + MPU6050
PITCH, YAW, ROLL działają, nawet dryfowanie zaprzestało lecz na ramie występują drgania, które widać na wykresach przez co copter próbuje skręcać/etc.
Jak mogę je zniwelować?
Używam ramy: http://cheapdrone.co.uk/image/cache/dat ... 00x500.jpg
W środek włożyłem kawałek takie płytki http://sklep.msx-elektronika.pl/133-288 ... x150mm.jpg (jest idealnie przycięta) na której znajdują się wszystkie elementy, w miejscu na kamerę umieściłem nrf24l01 (http://pmfactory.nazwa.pl/loga/andruino ... 4ghz/3.jpg) który komunikuje się z aparaturą.
Jak mogę je zniwelować?
Używam ramy: http://cheapdrone.co.uk/image/cache/dat ... 00x500.jpg
{kind=link}
W środek włożyłem kawałek takie płytki http://sklep.msx-elektronika.pl/133-288 ... x150mm.jpg (jest idealnie przycięta) na której znajdują się wszystkie elementy, w miejscu na kamerę umieściłem nrf24l01 (http://pmfactory.nazwa.pl/loga/andruino ... 4ghz/3.jpg) który komunikuje się z aparaturą.
{kind=link}
{kind=link}
-
ClassAxion
- Posty: 32
- Rejestracja: piątek 06 lut 2015, 20:02
Re: MultiWii + MPU6050
No i kolejny problem.. założyłem śmigłą, i trzymając go za środek ramy czuję a nawet widzę jak tył nie chce się wznieść.. nie wiem czemu, baterie pociągnąłem na na maxa. w stronę przodu aby go dociążyć lecz tył nadal nie chce się wznieść. Nie wiem jak to wygląda w MultiWiiConf ale na 99% nie mam uszkodzonych silników bo copter normalnie się wznosił tyle tylko że miał tył bardziej dociążony. Dałem ~70% mocy i nadal się nie wzniósł, dopiero jak dałem 100% na tył to Cię uniósł.
Re: MultiWii + MPU6050
Nie próbuj się wznosić na tym etapie bo narobisz biedy (potniesz siebie i innych, pół biedy jak w domu to tylko paprotki  )
)
Wszystkie testy rób "w ręku" oczywiście uważając na śmigła!
Dopiero jak będziesz pewien że reakcje sprzętu są prawidłowe (zarówno na komendy z aparatury jak i na wyprowadzanie "ręką" z równowagi) WE WSZYSTKICH MOŻLIWYCH PŁASZCZYZNACH I KIERUNKACH --- wtedy możesz próbować startować. Najlepiej na miękkiej niewysokiej trawie 10cm.
Szkoda zdrowia i sprzętu na inne eksperymenty bo widać że dopiero się będziesz uczył. A może zainwestuj w cheerson'a CX-10 i na nim ucz się latać? Bardzo dobre nawyki wyrabia. I jest dość niewrażliwy na kraksy...
A co do problemu - czy skalibrowałeś ACC na poziomej powierzchni? Czy środkowe pozycje drążków masz na 1500?
Wszystkie testy rób "w ręku" oczywiście uważając na śmigła!
Dopiero jak będziesz pewien że reakcje sprzętu są prawidłowe (zarówno na komendy z aparatury jak i na wyprowadzanie "ręką" z równowagi) WE WSZYSTKICH MOŻLIWYCH PŁASZCZYZNACH I KIERUNKACH --- wtedy możesz próbować startować. Najlepiej na miękkiej niewysokiej trawie 10cm.
Szkoda zdrowia i sprzętu na inne eksperymenty bo widać że dopiero się będziesz uczył. A może zainwestuj w cheerson'a CX-10 i na nim ucz się latać? Bardzo dobre nawyki wyrabia. I jest dość niewrażliwy na kraksy...
A co do problemu - czy skalibrowałeś ACC na poziomej powierzchni? Czy środkowe pozycje drążków masz na 1500?
infekcja FPV postępuje w zastraszającym tempie...
Re: MultiWii + MPU6050
ClassAxion, Podejrzewam, że masz odwrotnie Pitch.
Nie wiem czy dobrze zrozumiałem ale czy Ty do sterowania używasz jakiegoś goowna na 2.4?
Jeżeli tak to szkoda dziadować i użyć aparatury i linku RC.
Nie wiem czy dobrze zrozumiałem ale czy Ty do sterowania używasz jakiegoś goowna na 2.4?
Jeżeli tak to szkoda dziadować i użyć aparatury i linku RC.
Pozdrawiam Sławek
... jeśli nie wiesz co robić, nabieraj wysokości. Jeszcze nikt nie zderzył się z niebem...
... jeśli nie wiesz co robić, nabieraj wysokości. Jeszcze nikt nie zderzył się z niebem...
-
ClassAxion
- Posty: 32
- Rejestracja: piątek 06 lut 2015, 20:02
Re: MultiWii + MPU6050
Nie nie nie, nie zamierzam się wznosić, zawsze go trzymam :)
Pół roku mam x30v-ufo lecz nie spełnia on moich oczekiwań..
Drążki są ustawione dobrze. ACC się kalibruje samo podczas uruchomienia (uruchamiam zawsze na płaskiej powierzchni) czy trzeba jeszcze coś zrobić?
cebulator, używam lecz mam zamiar przenieść się na normalną aparaturę. PITCH jest dobry.
Pół roku mam x30v-ufo lecz nie spełnia on moich oczekiwań..
Drążki są ustawione dobrze. ACC się kalibruje samo podczas uruchomienia (uruchamiam zawsze na płaskiej powierzchni) czy trzeba jeszcze coś zrobić?
cebulator, używam lecz mam zamiar przenieść się na normalną aparaturę. PITCH jest dobry.