Naza - ustawienia GAIN
Moderatorzy: moderatorzy2014, moderatorzy
Re: Naza - ustawienia GAIN
Będę w domu dopiero w następny weekend, wtedy mogę podrzucić zdjęcia i ustawienia, ale mój build jest dość nietypowy bo ciężki (ok. 2kg) i na 3S z 10x5.

Re: Naza - ustawienia GAIN
Aby ułatwić innym życie to napiszę do czego doszedłem:) Dla jednych to oczywista oczywistość, dla innych nie koniecznie.
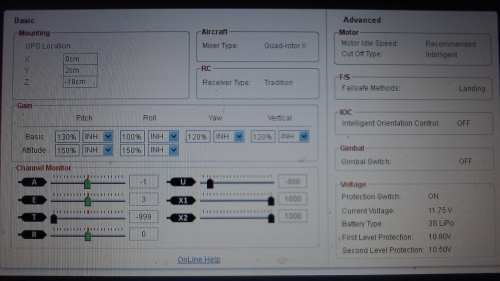
Basic GAIN:
Są to ustawienia poziomu reakcji drona na nasze komendy oraz na auto-poziomowanie. Tzn. z jaką "intensywnością" ma reagować na powrót do zawisu po wykonaniu jakiegoś wychylenia.
Jeżeli ustawienie będzie zbyt wysokie to dron zacznie drgać w danej osi. Jeżeli natomiast ustawienie będzie zbyt niskie to również spowoduje oscylacje drona w danej osi skutkujące prawdopodobnie kretem. Trzeba dobrać taką wartość aby dron nie starał się cały czas "poziomować" danej osi (skutek to wibracje o niskiej amplitudzie) oraz aby nie była to tak niska wartość, że dron przy poziomowaniu przekroczy poziom "0" czyli wychyli się za daleko w stronę przeciwną, bo to spowoduje, że dron zacznie się majtać jak wahadło coraz silniej aż do wywrotki.
Pitch: ustawienie dla osi wychylenia przód/tył.
Roll: ustawienie dla osi wychylenia lewo/prawo.
Yaw: ustawienie dla osi obrotu.
Vertical: ustawienie dla wypoziomowania wysokości.
Ustawienia Pitch i Roll dla symetrycznej osi (np. F450) powinny być takie same. Jeżeli dron jest niesymetryczny tak jak np. TBS DISCO to ustawienia dla osi Roll powinny być lekko (5-10%) niższe od osi Pitch. Ustawienia dla Yaw i Vertical powinny być indywidualnie ustawiane.
Tak więc kolejność: Najpierw Pitch, Roll. Potem Yaw i Vertical. Ustawiając Pitch i Roll staramy się jak najbardziej zmniejszyć wibracje naszej maszyny.
Ustawiając Yaw staramy się ustawić jak najdokładniejszy obrót w miejscu. Ustawiając Vertical staramy się ustawić jak najdokładniejszą stabilizację wysokości drona.
Attitude GAIN:
Te ustawienia odpowiadają szybkości i płynności reakcji drona na nasze komendy. Tzn. im wyższe ustawienia Attitude GAIN tym szybsza i gwałtowniejsza reakcja na drążki.
Pitch: poziom reakcji dla pochylenia przód/tył czyli lotu do przodu lub do tyłu.
Roll: poziom reakcji dla pochylenia lewo/prawo czyli lotu w lewo lub w prawo.
p.s. dodałem opis do pierwszego posta.
Basic GAIN:
Są to ustawienia poziomu reakcji drona na nasze komendy oraz na auto-poziomowanie. Tzn. z jaką "intensywnością" ma reagować na powrót do zawisu po wykonaniu jakiegoś wychylenia.
Jeżeli ustawienie będzie zbyt wysokie to dron zacznie drgać w danej osi. Jeżeli natomiast ustawienie będzie zbyt niskie to również spowoduje oscylacje drona w danej osi skutkujące prawdopodobnie kretem. Trzeba dobrać taką wartość aby dron nie starał się cały czas "poziomować" danej osi (skutek to wibracje o niskiej amplitudzie) oraz aby nie była to tak niska wartość, że dron przy poziomowaniu przekroczy poziom "0" czyli wychyli się za daleko w stronę przeciwną, bo to spowoduje, że dron zacznie się majtać jak wahadło coraz silniej aż do wywrotki.
Pitch: ustawienie dla osi wychylenia przód/tył.
Roll: ustawienie dla osi wychylenia lewo/prawo.
Yaw: ustawienie dla osi obrotu.
Vertical: ustawienie dla wypoziomowania wysokości.
Ustawienia Pitch i Roll dla symetrycznej osi (np. F450) powinny być takie same. Jeżeli dron jest niesymetryczny tak jak np. TBS DISCO to ustawienia dla osi Roll powinny być lekko (5-10%) niższe od osi Pitch. Ustawienia dla Yaw i Vertical powinny być indywidualnie ustawiane.
Tak więc kolejność: Najpierw Pitch, Roll. Potem Yaw i Vertical. Ustawiając Pitch i Roll staramy się jak najbardziej zmniejszyć wibracje naszej maszyny.
Ustawiając Yaw staramy się ustawić jak najdokładniejszy obrót w miejscu. Ustawiając Vertical staramy się ustawić jak najdokładniejszą stabilizację wysokości drona.
Attitude GAIN:
Te ustawienia odpowiadają szybkości i płynności reakcji drona na nasze komendy. Tzn. im wyższe ustawienia Attitude GAIN tym szybsza i gwałtowniejsza reakcja na drążki.
Pitch: poziom reakcji dla pochylenia przód/tył czyli lotu do przodu lub do tyłu.
Roll: poziom reakcji dla pochylenia lewo/prawo czyli lotu w lewo lub w prawo.
p.s. dodałem opis do pierwszego posta.
Ostatnio zmieniony wtorek 21 cze 2016, 21:25 przez matulekpl, łącznie zmieniany 1 raz.
Moje zabawki: Syma X5SW ORANGE + TX MOD | Syma X8C MODDED | DJI F450 NaZa-GULL - RIP. | TBS Discovery NAZA-GuLL | DJI Phantom 3 ADV - SPRZEDANY | DJI Phantom 4 PRO
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
Re: Naza - ustawienia GAIN
Świetnie! Wielkie dzięki!

Re: Naza - ustawienia GAIN
Myślę że te ustawienia bardziej zależą od indywidualnych potrzeb czy przyzwyczajeń użytkownika a wpływ na występowanie drgań czy yello jest dużo mniejszy. W copterach symetrycznych np popularnym F450 i wadze powiedzmy 1500g były by dopracowane i każdy miał je ustawione tak samo, a jest inaczej, ilu pilotów tyle opcji i większość jest zadowolona.
Moje w TBS Disco od dwóch lat takie same
Moje w TBS Disco od dwóch lat takie same
Wszystko co lata, jeździ, pływa no i ... kobieta.
Re: Naza - ustawienia GAIN
Kamil dobry opis....
Które parametry gain odpowiedzialne są za oscylacje przy zmniejszaniu wysokości?
Model lata wg mnie zadowalająco, trzyma pozycję przy obrocie, tylko przy schodzeniu go "telepie".
Które parametry gain odpowiedzialne są za oscylacje przy zmniejszaniu wysokości?
Model lata wg mnie zadowalająco, trzyma pozycję przy obrocie, tylko przy schodzeniu go "telepie".

Re: Naza - ustawienia GAIN
Za to odpowiedzialny jest VRS (vortex ring state)...pkucaba pisze:Które parametry gain odpowiedzialne są za oscylacje przy zmniejszaniu wysokości?
Model lata wg mnie zadowalająco, trzyma pozycję przy obrocie, przy schodzeniu go "telepie".
Re: Naza - ustawienia GAIN
Spróbuj pokombinować z pitch i roll, bo możesz miec lekko za wysokie.
Moje zabawki: Syma X5SW ORANGE + TX MOD | Syma X8C MODDED | DJI F450 NaZa-GULL - RIP. | TBS Discovery NAZA-GuLL | DJI Phantom 3 ADV - SPRZEDANY | DJI Phantom 4 PRO
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
WWW/BLOG: www.matulekpl.com | Kanał YouTube: Youtube | Foto: Flickr
Re: Naza - ustawienia GAIN
http://fpvlab.com/forums/showthread.php ... post178861 post 3280
http://fpvlab.com/forums/showthread.php ... post108872 post 284
http://fpvlab.com/forums/showthread.php ... post127464 post 1202
http://rcschimhangar.blogspot.com/2012/ ... overy.html
Jak widać każdy ma swoje dziwactwa
http://fpvlab.com/forums/showthread.php ... post108872 post 284
http://fpvlab.com/forums/showthread.php ... post127464 post 1202
http://rcschimhangar.blogspot.com/2012/ ... overy.html
Jak widać każdy ma swoje dziwactwa
Wszystko co lata, jeździ, pływa no i ... kobieta.