Gdy problem z dryfem NAZY po obrocie w osi YAW dopadł i mnie próbowałem znaleźć rozwiązanie na naszym, i innych forach oraz YT.
Jedni cudowali z gainami, inni z wyważeniem a jeszcze inni uznali to za wadę nowego firmware NAZY 4.02...
Nie testowałem starszej wersji firmware bo nie chciałem mieć przykrego wypadku gdyby przypadkiem odpadło choć jedno śmigło.
Rozwiązania nie znalazłem i dlatego założyłem nowy wątek by opisać co mi udało się osiągnąć.
I tak po wielu próbach z gainami i wyważaniem nic nie udało mi się poprawić z dryfem.
W moim przypadku po obrocie w osi YAW NAZA odpływała jakieś 2 nie raz nawet 4 metry do swojego tyłu.
Tak jakby w trakcie obrotu zupełnie nie kontrolowała pozycji a po wykonaniu obrotu wracała do pkt gdzie rozpoczynał się obrót.
W quadzie z tą samą NAZĄ nie miałem tego problemu wiec dopatrywałem się faktycznie problemu ze sterowaniem przy 6 śmigłach.
Pewne wyczytane wnioski innych jak i moje pozwoliły mi przemyśleć sprawę z bezwładnością modelu a szczególnie przy obrocie w osi YAW.
Przy obrocie hexą w osi YAW z ustawionymi śmigłami poziomo praktycznie nic jej nie trzyma bo ciąg jest jedynie pionowo.
Wobec tego model jest w stanie utrzymać się na wysokości ale nie w pozycji.
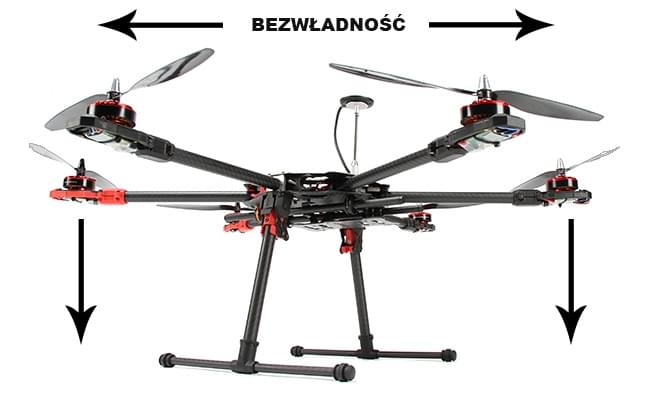
Każdy pewnie też zauważył że lepsze/droższe czy też profesjonalne ramy mają silniki ustawione pod lekkim kątem do zewnątrz.
I wg mnie ma to sens i poprawia stabilność modelu.
Nie jestem specjalisą od aerodynamiki ale moja skromna główka wymyśliła, że dzięki takiemu ustawieniu silników ciąg skierowany już pod niewielkim kątem do zewnątrz poprawia stabilność.
Ciąg silników w takim układzie nie pozwala na zbyt swobodny dryf.

Pomysł zastosowałem w mojej ramie Tarot FY680pro i....i zadziałało.
Teraz przy obrocie w osi YAW hexa nie dryfuje jak kiedyś o 2 czy więcej metrów.
Owszem delikatnie pływa ale tego moim zdaniem nie da się uniknąć.
Puki co jestem bardzo zadowolony i pewny że po obrocie nie ucieknie mi gdzieć na bok na chwilę.
Wygląda na to że hexa na nazie jest bardziej podana na siły bezwładności niż quad na nazie.