Qrcze, rozmawiamy o tym samym ale trochę innymi językami Może jakoś dojdziemy do sedna sprawy
Jak wiadomo w aparaturze (akurat u mnie MX-16Hott) musiał bym ustawić sobie 1aileron1flaps, mam sterowanie podstawowe 4-ro kanałowe. Ustawiam sobie wychylenia lotki (zakres 100% do góry i 50%w dół) jak będzie się wychylała lotka na kanale 8.
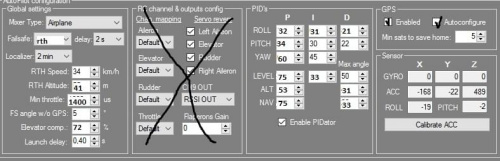
Jak się wychylą obie lotki po załączeniu opcji flaperon/aileron, rozumiem że ta opcja jest włczana kanałem nr7 i jest na (-) flaperons lub(+) ailerons.
Ben pisze:Ustawiam sobie wychylenia lotki (zakres 100% do góry i 50%w dół)
To jest możliwe do wykonania jeśli zrobisz sobie mix w aparaturze tak aby drążek lotek sterował jednocześnie kanałem RC1 (lotki) oraz RC7 (flaperons). Wtedy przy ruszaniu drążkiem lotek jedna lotka wychyli się w dół mocniej niż druga w górę. Mam nadzieję że to Ci rozjaśni sprawę.
Ben pisze:Jak się wychylą obie lotki po załączeniu opcji flaperon/aileron, rozumiem że ta opcja jest wączana kanałem nr7 i jest na (-) flaperons lub(+) ailerons.
Dokładnie tak. W zależności od ustawionych rewersów dając CH7 na + wychylasz obie lotki na raz w górę, a dając na - to w dół (lub na odwrót - w zależności od rewersu).
Więc chcąc mieć obie powyższe opcje jednocześnie musisz w aparaturze na kanale 7 ustawić mixer tak aby sumował jakiś potencjometr czy przełącznik robiący flaperons/spoilerons i drążek lotek aby uzyskać różne wychylenia lotek w górę i w dół.
Ben pisze:Ustawiam sobie wychylenia lotki (zakres 100% do góry i 50%w dół)
To jest możliwe do wykonania jeśli zrobisz sobie mix w aparaturze tak aby drążek lotek sterował jednocześnie kanałem RC1 (lotki) oraz RC7 (flaperons). Wtedy przy ruszaniu drążkiem lotek jedna lotka wychyli się w dół mocniej niż druga w górę. Mam nadzieję że to Ci rozjaśni sprawę.
[...].
Miś SORRY ale nadal się nie rozumiemy, powinno być inaczej niż napisałeś. Proszę poczytaj w wolnej chwili ten artykuł i wszystko się wyjaśni . Domniemam że wszytko powinno działać tak jak myślę.
Przepraszam że jestem tak dociekliwy i upierdliwy, ale jestem DECZKO "zboczony" na temat latania "trzynając się powietrza"
No przecie cału czas o tym piszę, tylko Ty mnie nie rozumisz. Samym kanałem lotek dostajesz to co jest na pierwszym obrazku i nic więcej.
Żeby uzyskać to co na drugim obrazku czyli "differential" to musisz jednocześnie zadziałać dwoma kanałami. Kanałem lotek aby lotki wychyliły się naprzemiennie, oraz kanałem 7 aby jedna była wychylona mocniej niż druga (bo kanał 7 wychyla obie lotki w tą samą stronę).
Takie coś uzyskasz robiąc mix w aparaturze.
A najlepiej będzie jak podłączysz dwa serwa pod CH1 i CH8 eleresa, wgrasz soft AP i wypróbujesz jak to działa. W trybie manual nie potrzebujesz mieć podłączonego ani MPU ani GPS. Sterowanie z RC oraz logika mikserów w AP i tak będzie działać.
miś pisze:[...]
Żeby uzyskać to co na drugim obrazku czyli "differential" to musisz jednocześnie zadziałać dwoma kanałami. Kanałem lotek aby lotki wychyliły się naprzemiennie, oraz kanałem 7 aby jedna była wychylona mocniej niż druga (bo kanał 7 wychyla obie lotki w tą samą stronę).
Takie coś uzyskasz robiąc mix w aparaturze. [...]
Po drobnej "walce" udało mi się ustawić taki mix, ale czy na pewno ma być na kanale 7 - jak się domyślam ten kanał jest tylko sterownikiem i pośrednikiem dla kanałów lotek. Pytam bo jeszcze nie nabyłem eLeReS'a i nie mam możliwości sprawdzić.
Jak ja lubię jak ludzie się zabierają do roboty od dupy strony... Odpowiedź że się da była ze dwie strony do tyłu.
Kanał 7 służy do sterowania klapolotkami, i powoduje wychylenie obu lotek w tą samą stronę.
I koniec śmiecenia i teoretyzowania. Na kolejne pytania odpowiem dopiero jak kupisz i zainstalujesz AP w modelu.
czy można i czy jest sensowne zastosowanie dodatkowego (równolegle ) UBEC do zasilania eReSeM AP i tym samum serw .W razie awaria regulatora silnika z ubecem TURNIGY Plush 60amp . Wtedy ten drugi ubec przejął by obciążenie, z AP i serw, nie zresetował by sie HOME i mógłby szybować w stronę domu
dobrze myślę ???
OK widzę że niema co ciągnąć tematu zasilania, Zrobiłem według schematu bardziej doświadczonych kolegów BEC zewnętrzny na serwa.
Polatałem troszeczkę. Skywalker1900 jest super stabilny i w czasie PID-owania , które przebiegało bardzo przyjemnie i sprawnie dzieki PIDator w zestawie z BT i TrackMyRc.
Zawiesiłem się na ustawieniach pidu ALT , nie za bardzo wiem ja to działa. zmiany tego pidu nic nie dają , jeżeli chodzi o przełączenie AP w tryb RTH_D.- samolot jeżeli jest poniżej zadanej wysokości, OSTRO szarpie do góry zmiana pid-u ALT I jest od ograniczenia tego kąta?? jak wyczytałem z instrukcji ale ta zmiana nie bardzo wpływa na to szarpanie . proszę o pomoc które parametry mam zmienić
Ograniczenie kąta masz po prawej stronie (Max angle). U Ciebie 31 stopni - może być trochę za dużo. Ustaw 15.
A PID ALT ma wpływ tylko przy niewielkich różnicach wysokości zadanej i aktualnej (kilka metrów) i jest to czułość regulacji.
Takie szybkie pytanie, ponieważ "wróciłem" do świata modelarskiego, mam w roli nadajnika zwykly eleres od mifau oryginalny i pewnie v1 i chciałbym go przerobić na autopilota. Da radę czy też nie bo trzeba mieć eleresa w wersji 2?
Pozostałe graty mam, łącznie z eleresMod jako kandydata na nadajnik.
Pewnie pytanko było zadawane setki razy ale wiecie jak jest.. szukać się nie chciało... :)
Błogosławieni ci, którzy nie mając nic do powiedzenia, nie oblekają tego faktu w słowa.
Julian T.
Marceli - odpowiedź na to jest na pierwszej stronie tego wątku. Cytując Misia:
miś pisze:
do v1 będzie możliwość dołożyć ??
Nie. Będzie działać tylko na V2.
Na pytania dla czego odpowiem prosto: Taka jest polityka. To pierwszy fjuczer który będzie działał tylko na V2. W przyszłości mogą być kolejne.
No chyba że prześlesz swój odbiornik V1 do odpłatnej modyfikacji na "prawie V2", to wtedy zadziała. To "prawie" oznacza przeróbkę na V2 bez zakładania filtru LPF na antenie.
Czyli bez ingerencji Misia nie ruszy na V1 a jeżeli sprzęty masz od Mifau'a to na 100% jest to V1. V2 wprowadził Marbalon i szczerze - odżałuj i weź V2, szczególnie jeżeli latasz na 1,2GHz. Ten filterek naprawdę sporo daje.
Szczegółowe informacje na temat wywoływania debugowania w trybie JIT (just in time)
zamiast tego okna dialogowego znajdują się na końcu tego komunikatu.
************** Tekst wyjątku **************
System.ArgumentOutOfRangeException: Wartość '50' nie jest prawidłową wartością dla 'Value'. Wartość 'Value' powinna znajdować się w zakresie od 'Minimum' do 'Maximum'.
Nazwa parametru: Value
w System.Windows.Forms.NumericUpDown.set_Value(Decimal value)
w eLeReSConfigurator.Form1.map2control()
w eLeReSConfigurator.Form1.customRoundButton4_Click(Object sender, EventArgs e)
w System.Windows.Forms.Control.OnClick(EventArgs e)
w CustomRoundButton.CustomRoundButton.PerformClick()
w CustomRoundButton.CustomRoundButton.OnClick(EventArgs e)
w System.Windows.Forms.Control.WmMouseUp(Message& m, MouseButtons button, Int32 clicks)
w System.Windows.Forms.Control.WndProc(Message& m)
w System.Windows.Forms.Control.ControlNativeWindow.OnMessage(Message& m)
w System.Windows.Forms.Control.ControlNativeWindow.WndProc(Message& m)
w System.Windows.Forms.NativeWindow.Callback(IntPtr hWnd, Int32 msg, IntPtr wparam, IntPtr lparam)
************** Zestawy załadowane **************
mscorlib
Wersja zestawu: 4.0.0.0
Wersja Win32: 4.0.30319.17929 built by: FX45RTMREL
CodeBase: file:///C:/Windows/Microsoft.NET/Framework/v4.0.30319/mscorlib.dll
----------------------------------------
eLeReSConfigurator
Wersja zestawu: 1.0.0.0
Wersja Win32: 1.0.0.0
CodeBase: file:///D:/MULTIROTOR/eLeReS/eLeReSConfigurator1_25a.exe
----------------------------------------
System.Windows.Forms
Wersja zestawu: 4.0.0.0
Wersja Win32: 4.0.30319.17929 built by: FX45RTMREL
CodeBase: file:///C:/Windows/Microsoft.Net/assembly/GAC_MSIL/System.Windows.Forms/v4.0_4.0.0.0__b77a5c561934e089/System.Windows.Forms.dll
----------------------------------------
System.Drawing
Wersja zestawu: 4.0.0.0
Wersja Win32: 4.0.30319.17929 built by: FX45RTMREL
CodeBase: file:///C:/Windows/Microsoft.Net/assembly/GAC_MSIL/System.Drawing/v4.0_4.0.0.0__b03f5f7f11d50a3a/System.Drawing.dll
----------------------------------------
System
Wersja zestawu: 4.0.0.0
Wersja Win32: 4.0.30319.17929 built by: FX45RTMREL
CodeBase: file:///C:/Windows/Microsoft.Net/assembly/GAC_MSIL/System/v4.0_4.0.0.0__b77a5c561934e089/System.dll
----------------------------------------
System.Windows.Forms.resources
Wersja zestawu: 4.0.0.0
Wersja Win32: 4.0.30319.17929 built by: FX45RTMREL
CodeBase: file:///C:/Windows/Microsoft.Net/assembly/GAC_MSIL/System.Windows.Forms.resources/v4.0_4.0.0.0_pl_b77a5c561934e089/System.Windows.Forms.resources.dll
----------------------------------------
mscorlib.resources
Wersja zestawu: 4.0.0.0
Wersja Win32: 4.0.30319.17929 built by: FX45RTMREL
CodeBase: file:///C:/Windows/Microsoft.Net/assembly/GAC_MSIL/mscorlib.resources/v4.0_4.0.0.0_pl_b77a5c561934e089/mscorlib.resources.dll
----------------------------------------
************** Debugowanie w trybie JIT **************
Aby włączyć debugowanie w trybie just in time (JIT), plik .config tej
aplikacji lub komputera (machine.config) musi mieć
wartość jitDebugging ustawioną w sekcji system.windows.forms.
Aplikacja musi być również skompilowana z włączonym
debugowaniem.
Na przykład:
<configuration>
<system.windows.forms jitDebugging="true" />
</configuration>
Gdy debugowanie JIT jest włączone, wszystkie nieobsługiwane wyjątki
są wysyłane do debugera JIT zarejestrowanego na komputerze
i nie są obsługiwane w tym oknie dialogowym.
mogę kliknąć "kontynuuj" ale w tedy i tak przycisk Upload settings jest nie aktywny...
Próbowałem wgrywać soft rt, tx , ale kiedy wracam do AP jest znowu to samo. Co robić?