
Dziękuje kwakkwak pisze:MarcinFPV, Dla revo jest RaceFlight
http://www.rcgroups.com/forums/showthread.php?t=2533601
https://github.com/rs2k/raceflight/wiki
Cleanflight
Moderatorzy: moderatorzy2014, moderatorzy
Re: Cleanflight
01000100011101010111000001100001

Re: Cleanflight
Mam pytanie dotyczące failsafe. W owej zakładce mam zaznaczone dla throthle opcje "AUTO" co niby oznacza zejście z throthle na low. Gdy mam jakiś obroty silników, następnie wyłączę apke, to silniki najpierw schodzą do minimalnych obrotów, a następnie powoli rozkręcają się do maksa. Oczywiście chciałbym aby się wyłączyły. Ma ktoś jakiś pomysł, co mógłbym zrobić nie tak? Korzystam tylko z STAGE 1.
Ustawiłem też buzzer, aby w monecie złapania FS'a zaczął piszczeć. Po wyłączeniu apki piszczy przez ułamek sekundy i dalej nic. Wygląda jakby CF myślał, że FS już nie ma mimo wyłączonej apki.
Ustawiłem też buzzer, aby w monecie złapania FS'a zaczął piszczeć. Po wyłączeniu apki piszczy przez ułamek sekundy i dalej nic. Wygląda jakby CF myślał, że FS już nie ma mimo wyłączonej apki.
Re: Cleanflight
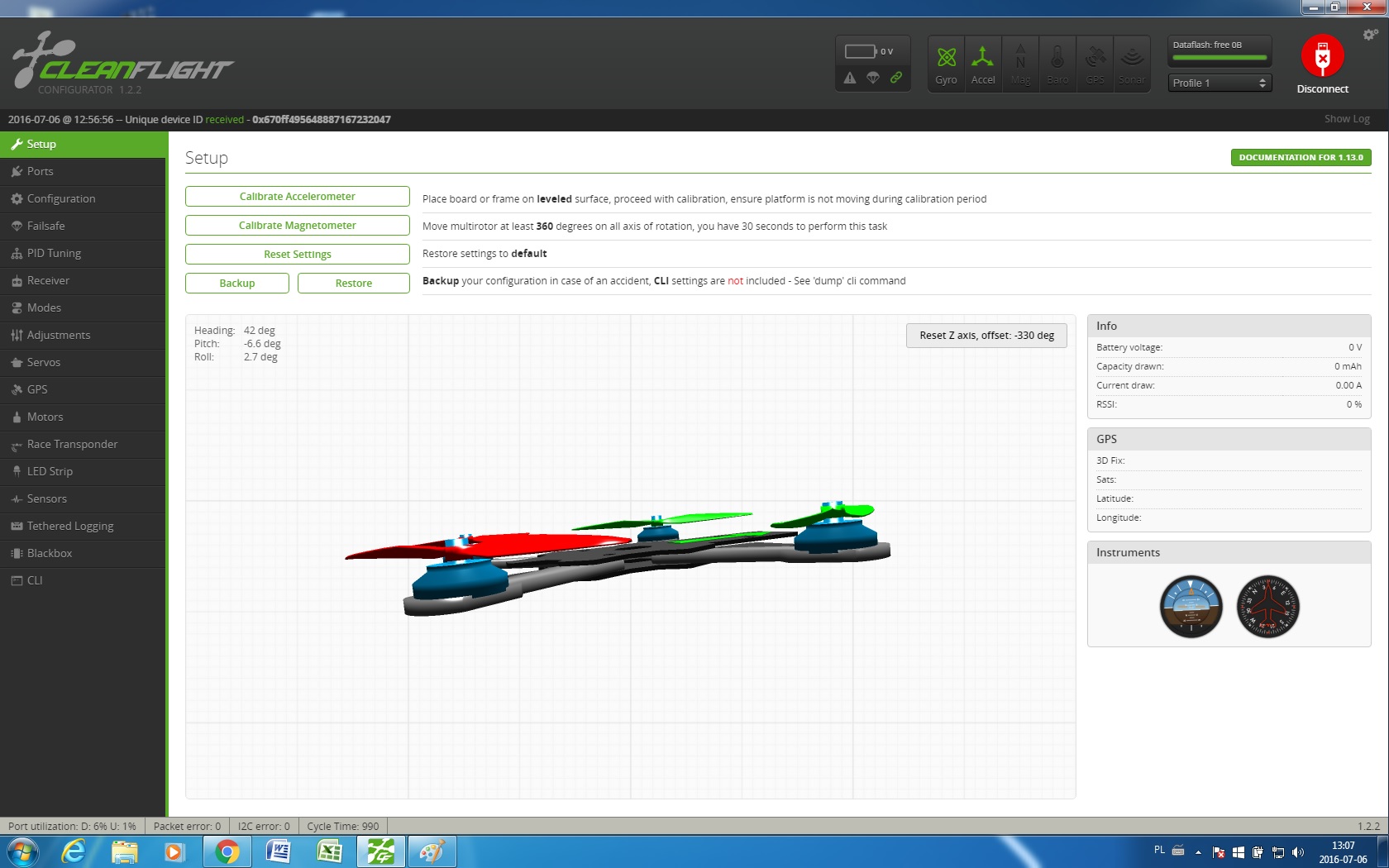
A czy ktoś zauważył w CC3D z cleanflight taki problem że w trybie odbiornika PPM kopter po kilku minutach się przechyla ?
Widać to bardzo dobrze na modelu 3D , po 5-10 min potrafi odchylić się o 10-15 st
Po przełączeniu na tryb odbioru PWM efekt nie występuje.
Oczywiście podczas lotu kopter zaczyna mocno dryfować w bok.
Sprawdzałem na dwóch egzemplarzach CC3D i w każdym to samo.
Po wgraniu betaflighta efekt ten nie występuje ale tam znowu nie potrafię opanować gazu, nie ma płynnej regulacji i ciąg
silników nie idzie za drążkiem.
Widać to bardzo dobrze na modelu 3D , po 5-10 min potrafi odchylić się o 10-15 st
Po przełączeniu na tryb odbioru PWM efekt nie występuje.
Oczywiście podczas lotu kopter zaczyna mocno dryfować w bok.
Sprawdzałem na dwóch egzemplarzach CC3D i w każdym to samo.
Po wgraniu betaflighta efekt ten nie występuje ale tam znowu nie potrafię opanować gazu, nie ma płynnej regulacji i ciąg
silników nie idzie za drążkiem.
Re: Cleanflight
jak u ciebie wygląda sytuacja z wibracjami na silnikach/śmigłach?
Może nie tłumaczy to problemu z rodzajem sygnału, ale odchylenia mogą być powodowane błędami na czujnikach.
Może nie tłumaczy to problemu z rodzajem sygnału, ale odchylenia mogą być powodowane błędami na czujnikach.
Re: Cleanflight
darnok pisze:jak u ciebie wygląda sytuacja z wibracjami na silnikach/śmigłach?
Może nie tłumaczy to problemu z rodzajem sygnału, ale odchylenia mogą być powodowane błędami na czujnikach.
Wibracje nie mają nic do rzeczy bo to się też dzieje gdy silniki nie pracują.
Wystarczy FC zasilić tylko z USB i patrzeć na odczyty w Cleanflight Configurator.

Re: Cleanflight
To występuje w trybie acro czy też w level? Moze to błędy acc? Jezlei rpoblem występuje na USB w configuratorze to to poprostu narastający błąd od bezruchu. W betaflight jest inaczej rozwiązane filtrowanie i może dlatego w beta to nie występuje? Niemniej nie rozumiem twojego problem z gazem na c3d... która wersja Betaflight?
Re: Cleanflight
Wgralem betaflight 2.9.0.
Ustawiłem wszystko podobnie jak w CF i po uzbrojeniu silników dodałem gazu , przez chwilę silniki nie reagują
po czym nagle dostają kopa i kopter wystrzelił jak z procy , trochę to dziwne.
Co do dryftu to CF ustawiony na tryb Angle.
Rozumiem że może występować jakiś błąd od bezruchu czy od temperatury ale dlaczego mają na to wpływ tryby odbioru PPM i PWM.
Na PWM latam 5 min i ląduję z poziomym kopterem , a w trybie PPM lądują z prawym drążkiem ostro wychylonym w lewo żeby kopter był poziomo.
Pewnie to jakiś bug w sofcie.
Ustawiłem wszystko podobnie jak w CF i po uzbrojeniu silników dodałem gazu , przez chwilę silniki nie reagują
po czym nagle dostają kopa i kopter wystrzelił jak z procy , trochę to dziwne.
Co do dryftu to CF ustawiony na tryb Angle.
Rozumiem że może występować jakiś błąd od bezruchu czy od temperatury ale dlaczego mają na to wpływ tryby odbioru PPM i PWM.
Na PWM latam 5 min i ląduję z poziomym kopterem , a w trybie PPM lądują z prawym drążkiem ostro wychylonym w lewo żeby kopter był poziomo.
Pewnie to jakiś bug w sofcie.
Re: Cleanflight
Jaka aparatura,link, sprawdź jakie masz wartości kanałów w zakładce receiver dla pwm i ppm.
Re: Cleanflight
Wszystko wyglada na problem z twoja apka albo odbiornikiem albo obiema sprawami ... Do 2.9 uzywasz betaflight configuratora w wersji 1.4?
Wysłane z mojego M1
Wysłane z mojego M1
Re: Cleanflight
Odbiornik to FrSky V8R7SP ale to też nie ma znaczenia bo dryft występuje nawet po odłączeniu odbiornika na gołym FC.Jackuzy pisze:Wszystko wyglada na problem z twoja apka albo odbiornikiem albo obiema sprawami ... Do 2.9 uzywasz betaflight configuratora w wersji 1.4?
FC wpięte tylko do USB kompa.
Co do betaconf to używałem wersji 1.6.2
Tak to wygląda po ok 5 minutach w opcji PPM
Zmienam na PWM , reboot i wszystko wraca do normy.
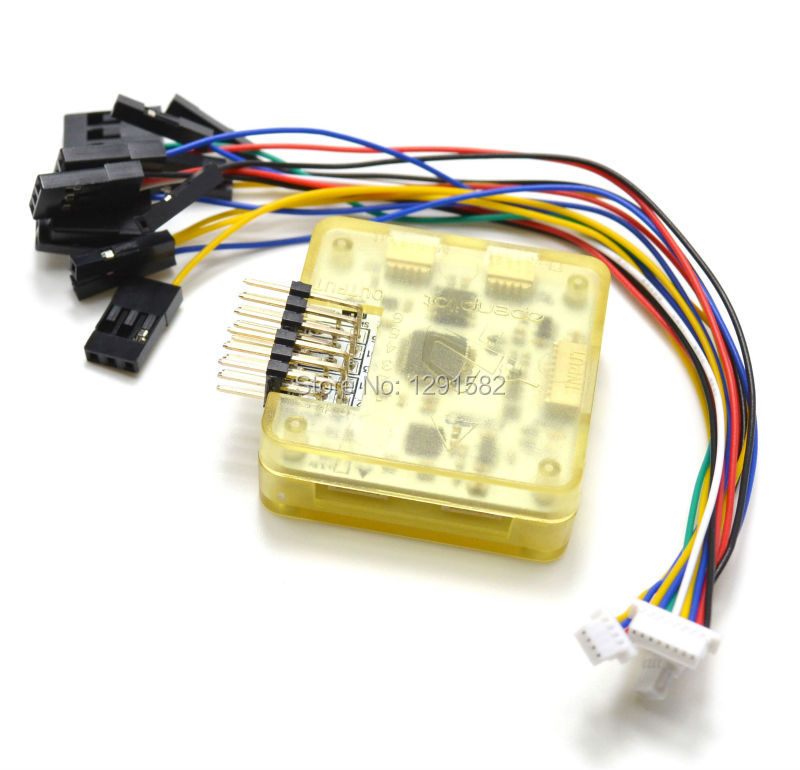
CC3D mam takie
Ostatnio zmieniony środa 06 lip 2016, 16:27 przez darek53, łącznie zmieniany 1 raz.

Re: Cleanflight
Stąd możesz pobrać manuala do tego odbiornika - to w nim siedzi prawdopodobnie problem: http://www.frsky-rc.com/download/view.p ... ual-V8R7SP
Odbiornik ten, podobnie jak większość frsky, ma problem z przekazywaniem 8 kanałów w trybie PPM - po prostu ramka PPM jest za krótka ( w tym przypadku tylko 20ms ) aby przekazać stan wszystkich kanałów, jeżeli wszystkie wartości są większe od minimum ( pozycja neutralna to nie minimum ! )
Dla niektórych odbiorników istnieją alternatywne softy, które wydłużają ramkę do 28ms - sam używam i potwierdzam, że to działa.
Do tego odbiornika niestety takiego softu nie widzę - dlatego jedyne rozwiązanie, TO ZGODNIE Z MANUALEM, używanie tylko 6 kanałów i zadbanie o to, aby ostatnie były ustawione na min - wtedy synchronizacja ramek PPM się nie posypie.
Poniżej masz kilka filmików, które obrazowo wyjaśniają problem i wskazują rozwiązanie:
https://www.youtube.com/watch?v=2CUW4juhgyk
https://www.youtube.com/watch?v=sEChFDRf8Ek
https://www.youtube.com/watch?v=FBAKxz7NSJk
https://www.youtube.com/watch?v=EViw4lBRa94
Odbiornik ten, podobnie jak większość frsky, ma problem z przekazywaniem 8 kanałów w trybie PPM - po prostu ramka PPM jest za krótka ( w tym przypadku tylko 20ms ) aby przekazać stan wszystkich kanałów, jeżeli wszystkie wartości są większe od minimum ( pozycja neutralna to nie minimum ! )
Dla niektórych odbiorników istnieją alternatywne softy, które wydłużają ramkę do 28ms - sam używam i potwierdzam, że to działa.
Do tego odbiornika niestety takiego softu nie widzę - dlatego jedyne rozwiązanie, TO ZGODNIE Z MANUALEM, używanie tylko 6 kanałów i zadbanie o to, aby ostatnie były ustawione na min - wtedy synchronizacja ramek PPM się nie posypie.
Poniżej masz kilka filmików, które obrazowo wyjaśniają problem i wskazują rozwiązanie:
https://www.youtube.com/watch?v=2CUW4juhgyk
https://www.youtube.com/watch?v=sEChFDRf8Ek
https://www.youtube.com/watch?v=FBAKxz7NSJk
https://www.youtube.com/watch?v=EViw4lBRa94
Świat z góry wygląda lepiej 
Re: Cleanflight
Dzięki za odpowiedzi ale napisałem już ze to się robi nawet bez fizycznie podłączonego odbiornika.
Zresztą odbiornik ten latał kiedyś w MK i było dobrze.
Gdyby się komuś chciało to sprawdzić na swoim CC3D podłączonym do komputera to było by jakieś porównanie, może po prostu nikt wcześniej nie zwracał na to uwagi.
Zresztą odbiornik ten latał kiedyś w MK i było dobrze.
Gdyby się komuś chciało to sprawdzić na swoim CC3D podłączonym do komputera to było by jakieś porównanie, może po prostu nikt wcześniej nie zwracał na to uwagi.
Re: Cleanflight
Brak fizycznie podłączonego odbiornika - brak sygnału - zachowanie FC nieprzewidywalne.
PPM z błędną ramkę - zachowanie FC nieprzewidywalne.
PWM z poprawnym sygnałem - zachowanie FC prawidłowe.
PPM z błędną ramkę - zachowanie FC nieprzewidywalne.
PWM z poprawnym sygnałem - zachowanie FC prawidłowe.
Świat z góry wygląda lepiej
Re: Cleanflight
Podłączyłem sygnał PPM przez osobny sumator PPM i ciągle to samo.
Pozostaje na razie latać na sygnale PWM.
Pozostaje na razie latać na sygnale PWM.
Ostatnio zmieniony środa 06 lip 2016, 16:23 przez darek53, łącznie zmieniany 1 raz.
Re: Cleanflight
Sprawdź tylko jakiej długości ramkę generuje sumator.
Jeżeli 28ms - to OK.
Jeżeli krótszą - to może być ten sam problem.
Na oscyloskopie to pięknie widać - gubi synchronizację.
Jeżeli 28ms - to OK.
Jeżeli krótszą - to może być ten sam problem.
Na oscyloskopie to pięknie widać - gubi synchronizację.
Świat z góry wygląda lepiej