@ el.szaman:
Dziękuję za Twój komentarz - myślę, że jest to kolejny głos który pokazuje, że krytyka powinna być konstruktywna. Jeśli chodzi o moje zniechęcanie się to ja się nie zniechęcam z dwóch powodów:
1) lubię ludzi, kocham życie
2) robię to co lubię i zarabiam na tym pieniądze
Ponieważ w pkt. 3 jest prośba o powrót do merytoryki, więc poniżej kolejne informacje na temat naszych zespolonych regulatorów...
Zespolony regulator
easyESCU4 od piątku lata w najmniejszym naszym quadrocopterze - Hornet-X4S.
Więcej o platformie Hornet-X4S w tym wątku:
Hornet-X4S czyli platforma na halę i do FPV
A teraz kilka zdjęć samego regulatora, który jest obecnie naszym flagowych projektem

.
W tym regulatorze jest zawarte wieloletnie doświadczenie całego zespołu
RCConcept Team, którym mam przyjemność kierować
. Wielkie gratulacje należą się Marcinowi, który w projektowaniu elektroniki doszedł do perfekcji i wielokrotnie przegonił swojego nauczyciela (którym kiedyś byłem
). Wielkie gratulacje należą się również Przemkowi, który cały czas stał na stanowisku, że to właśnie w regulatorze obrotów należy szukać największego potencjału dla Hornet i tak faktycznie było, co potwierdzają niezależni piloci a także eksperci w temacie wielowirnikowców oraz teorii sterowania.
Tak wygląda górna część regulatora:
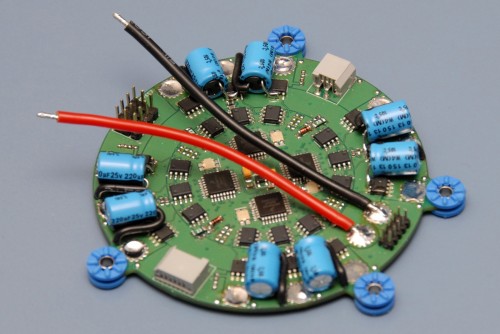 POWIĘKSZENIE
POWIĘKSZENIE
A tak dolna:
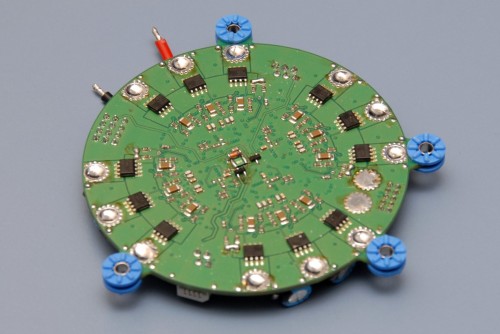 POWIĘKSZENIE
POWIĘKSZENIE
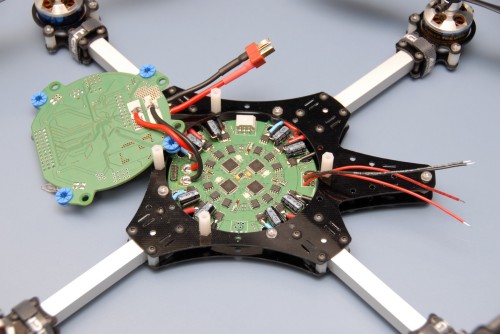
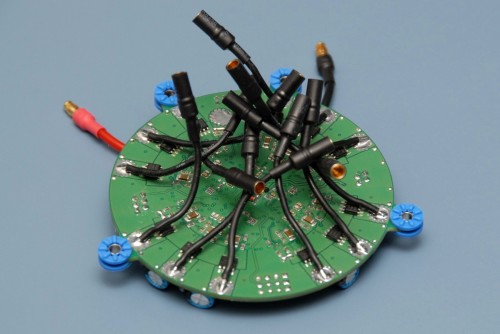
Jeden regulator zespolony easyESCU4 zastępuje cztery pojedyncze easyESCU12A i całkowicie eliminuje przewody czyli "makaron":
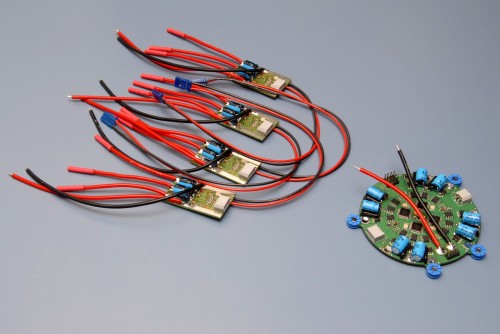 POWIĘKSZENIE
POWIĘKSZENIE
Masa regulatora zespolonego to tyllko
44,0g:
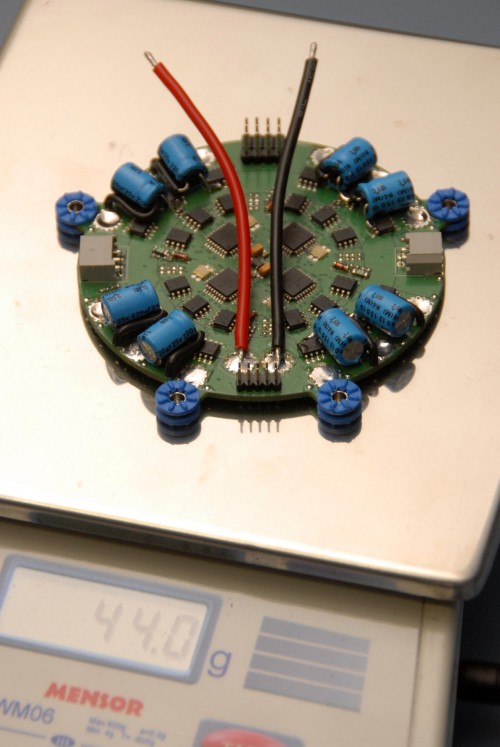 POWIĘKSZENIE
POWIĘKSZENIE
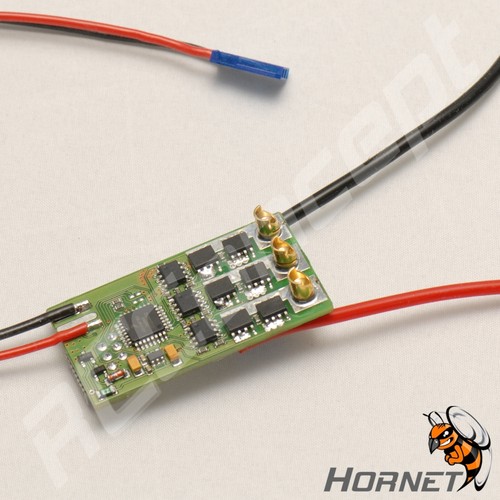
Co w porównaniu z masą pojedynczego regulatora easyESCU12A:
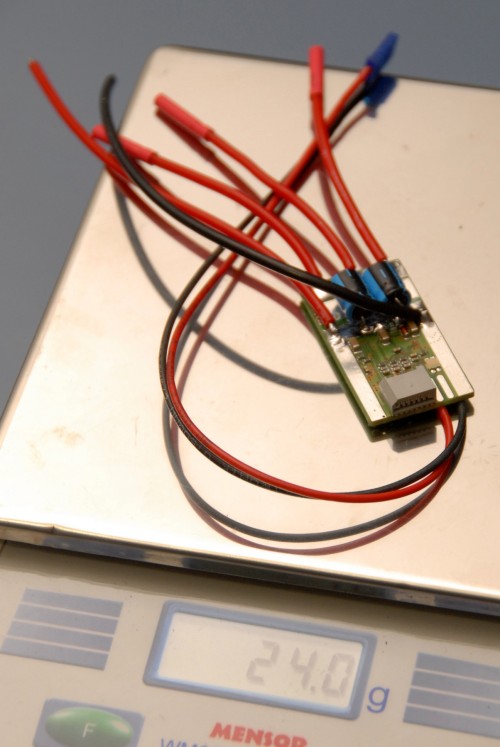 POWIĘKSZENIE
POWIĘKSZENIE
a tym bardziej czterech...
 POWIĘKSZENIE
POWIĘKSZENIE
wypada bardzo korzystnie. Zresztą oceńcie to sami.
EDIT by Klenio:
Dodanie brakującego linku.




















{kind=link}