P- współczynnik części proporcjonalnej - im większy odchylenie tym mocniejsza reakcja (np reakcja na odchyłkę od poziomu o 10stopni jest 2 razy mocniejsza niż reakcja na odchyłkę 5stopni)
I - współczynnik członu całkującego - im odchyłka dłużej trwa tym mocniejsza reakcja (np odchyłka o 5stopni utrzymująca się w czasie powoduje coraz silniejszą reakcję)
D - współczynnik członu różniczkującego - uwzględnia szybkość zmian i ich kierunek (np mocniejsza reakcja jeżeli odchyłka jest np 5stopni ale narasta niż jak jest 5stopni ale maleje)
no dobra.. powiedzmy ze wisi nie telepie.. ... teraz pytanie czy jest opcja zeby pidami ustawić quada tak aby wisiał rownie dobrze w podmuchach wiatru.. reakcje na podmuchy sa jednak nerwowe..
Jesli szybko to za duze D (lub niewlasciwie dobrane DD (deltaD) - w MK to jest GYRO D).,
MK "niestety" dynamizuje wartosc sily stabilizacji w zaleznosci od obrotow silnika.
Nazywa sie to Dynamic Stability. - co utrudnia dobranie odpowiednich parametrow (ale pomaga np przy ladowaniu)
Im wartosc ta jest wieksza, tym silniejsza sila stabilizacji. Jesli w zawisie jest ok, a przy wiekszym gazie trzesie, to trzeba zwiekszyc (lub zmniejszyc - bo to nie jest takie oczywiscie) GYRO D (delta D).
Ogolnie (pomijajac MK) jest tak:
...przy zalozeniu, ze I = 0....
- buja sie - za duze P (lub za male D)
- trzesie sie - za duze D, lub za male DD
- szybko sie trzesie i wpada w szybki rezonans - za duze (lub za male) deltaD.
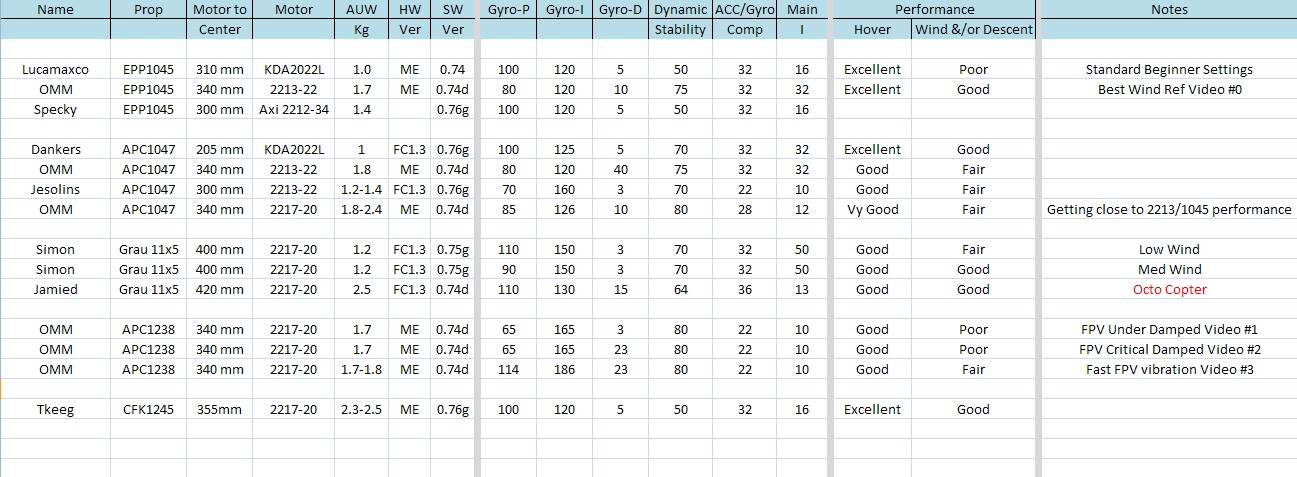
Może przyda się początkującym - w tabelce wyszczególniono śmigła, silniki, odległość silnika od środka CP, rodzaj FC, firmware czy pidy. Na końcu zachowanie koptera w zawisie czy odporność na wiatr... z resztą po co ja to piszę każdy może sam sobie przeczytać i popróbować innych ustawień niż tylko swoich