Pierwszy lot testowy mam za sobą.
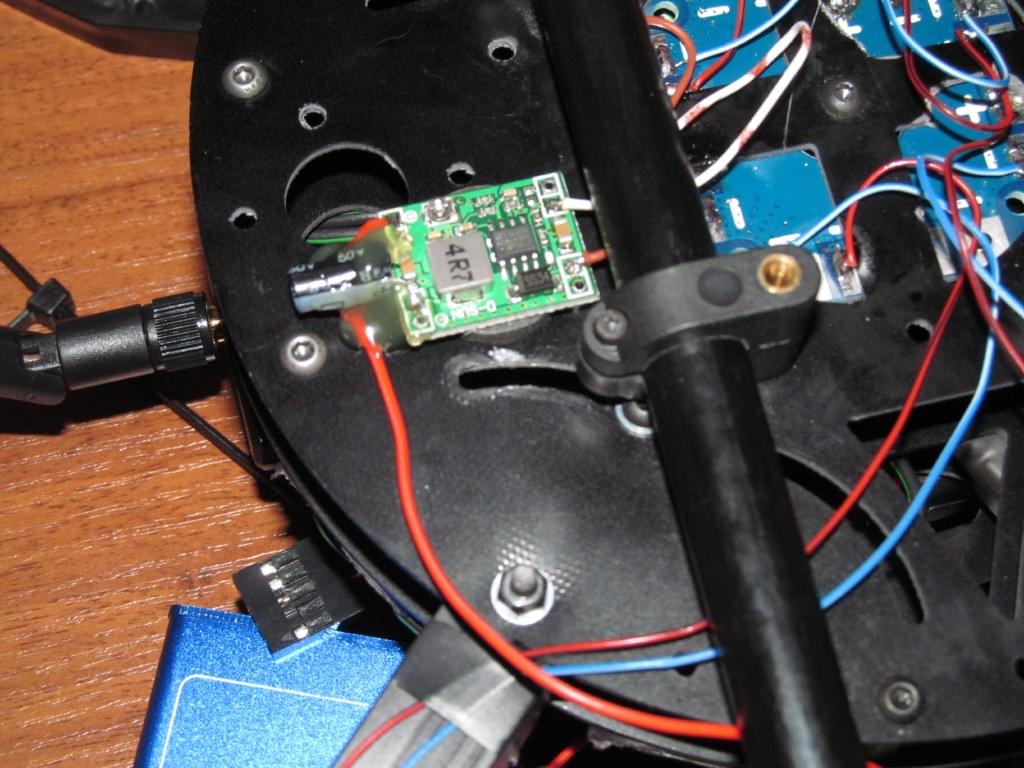
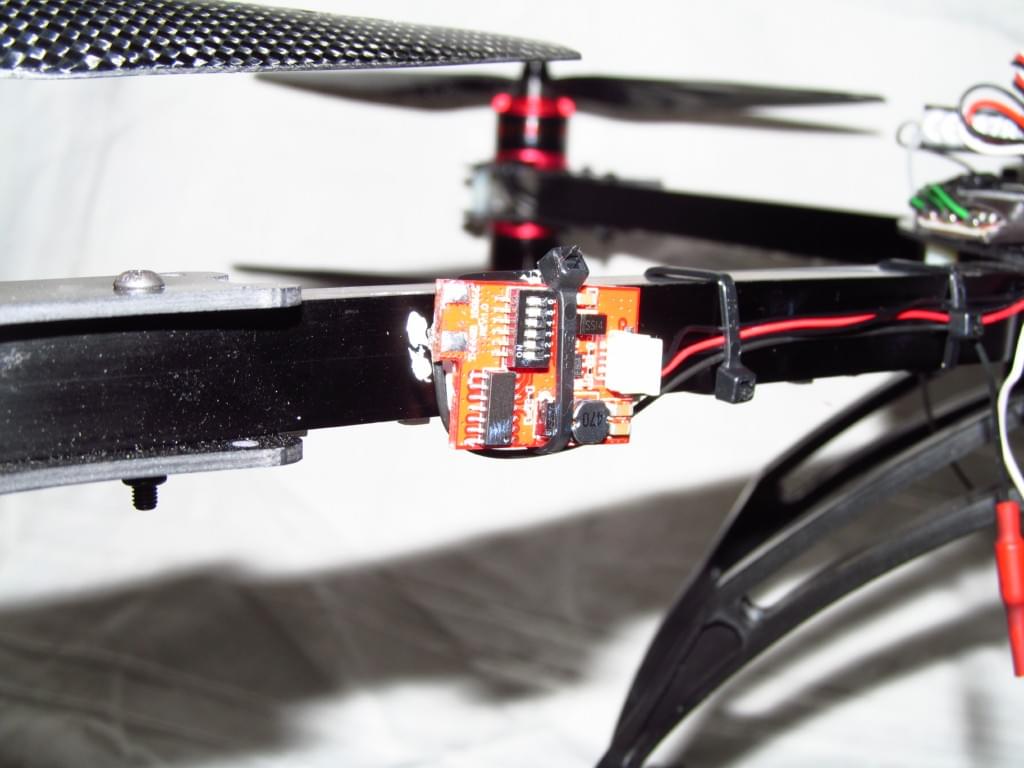
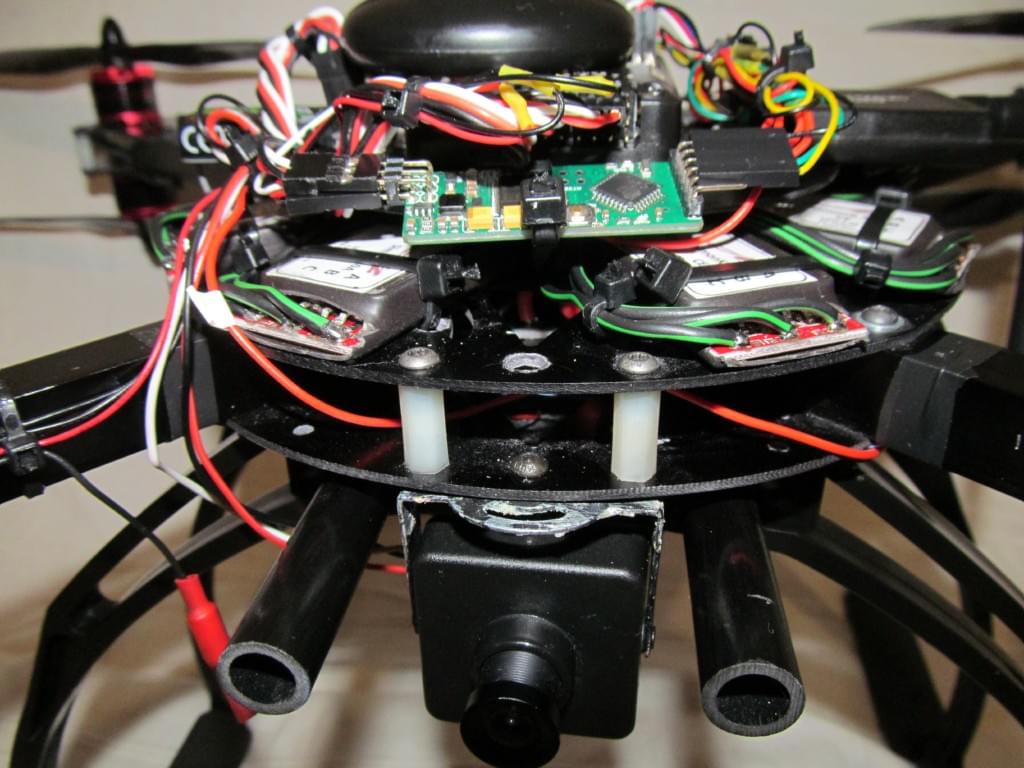
Tak wyglądał sprzęt przed lotem.

tak w trakcie, niestety ale na tablecie nic nie widać ale za to było dobrze słychać.




test wyglądał tak.
Najpierw uzbrojenie silników, gaz lekko w górę i sprawdzałem czy nic się nie dymi.
Na tablecie hdop 1,3.
Tryb lotu loiter, gaz ponad połowa i oczekiwanie - fiknie koziołka czy nie?
Tym razem obeszło się bez nieprzewidzianych atrakcji. Okto gładko ruszyło w górę. Na dwóch metrach sekunda oczekiwania i szybkie lądowanie.
Sprawdziłem regulatory i silniki, jak na razie wszystko tak jak powinno być.
Ponowne uzbrojenie i w górę. Teraz na wysokość ok 10 metrów.
No i tu niespodzianka wieje spory wiatr ale zauważyłem, że copterem lekko buja nie tak jak to powinno w tych warunkach.
Wszystko w trybie loiter.
Obrót dookoła własnej osi. Raz wolny raz szybki. OK
Odlot 10-15metrów do przodu - nic nie znosi. OK
RTH - kopter wylądował ok 20cm od miejsca startu, jak na hdop1,3 to bardzo dobrze.
COMPASMOT zadziałał bezbłędnie, wprowadzona kompensacja na prąd zrobiła dokładnie to co miała zrobić nic nie dryfuje i nic nie znosi z kursu.
Ponowny start i chwila lotu w trybie aldhold czyli bez kompasu i dps-a ale z barometrem - żadnych złych objawów. OK
Ze względu na te lekkie bujanie nie obejdzie się bez pidowania - czegoś czego bardzo nie lubię.
Najpierw zrobiłem zrzut ekranu z pierwotnymi pidami.
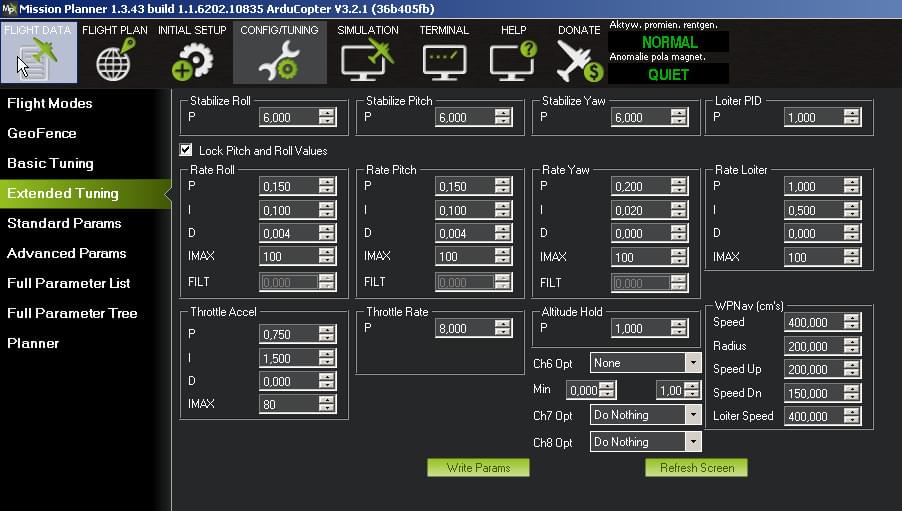
Ustawiłem 7 kanał na autpidowanie i heja w górę.
Wszystko w trybie aldhold. Zaczął wiać spory boczny wiatr ale nie chciałem przerywać i tylko patrzyłem kiedy spadnie:))
Takiego dziwnego tańca jeszcze nie miałem, na takim wietrze jeszcze nigdy nie robiłem autotune:))
Miotało go nawet do 50 metrów w bok.

Bez urazy Kuczy ale pidowanie nie trwało pół roku a tylko 9 minut.:))
Wolę aby moje pidowanie robili profesjonaliści czyli AUTOTUNE.
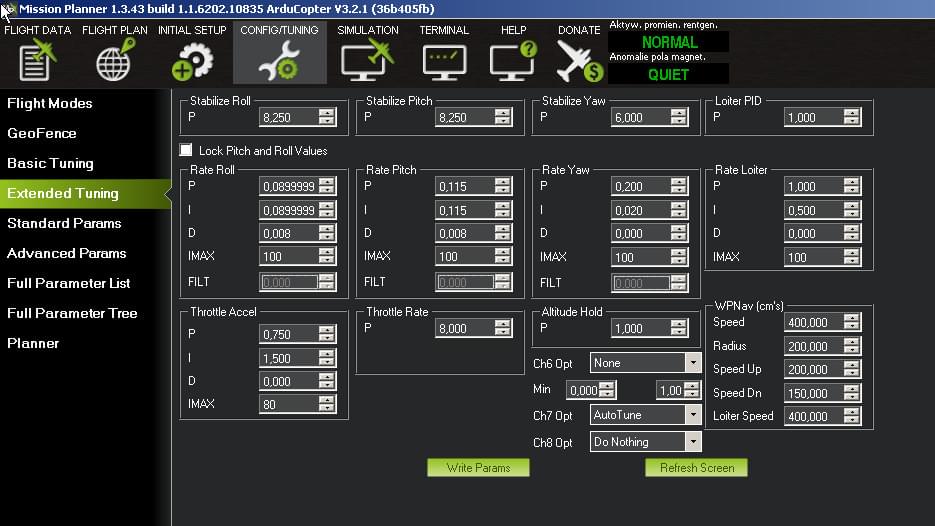
Po autotune polatałem na ustawionych pidach i już go nie bujało - zaczął latać tak jak chciałem. Tym razem było dobrze.
Pidy po autotune
Pora teraz wyposażyć octo w jakieś gagety.:))