Górna część prototypowej ramy:

POWIĘKSZENIE
Dolna część z półką:

POWIĘKSZENIE
Mocowaniu półki do dolnej części przy pomocy słupków:

POWIĘKSZENIE
Kwadratowe ramie:

POWIĘKSZENIE
Widok na powiercone otwory pozwalające na bezpośredni montaż silników w rastrze 19mm:

POWIĘKSZENIE
Przymierka modułu CSDU z przodu:
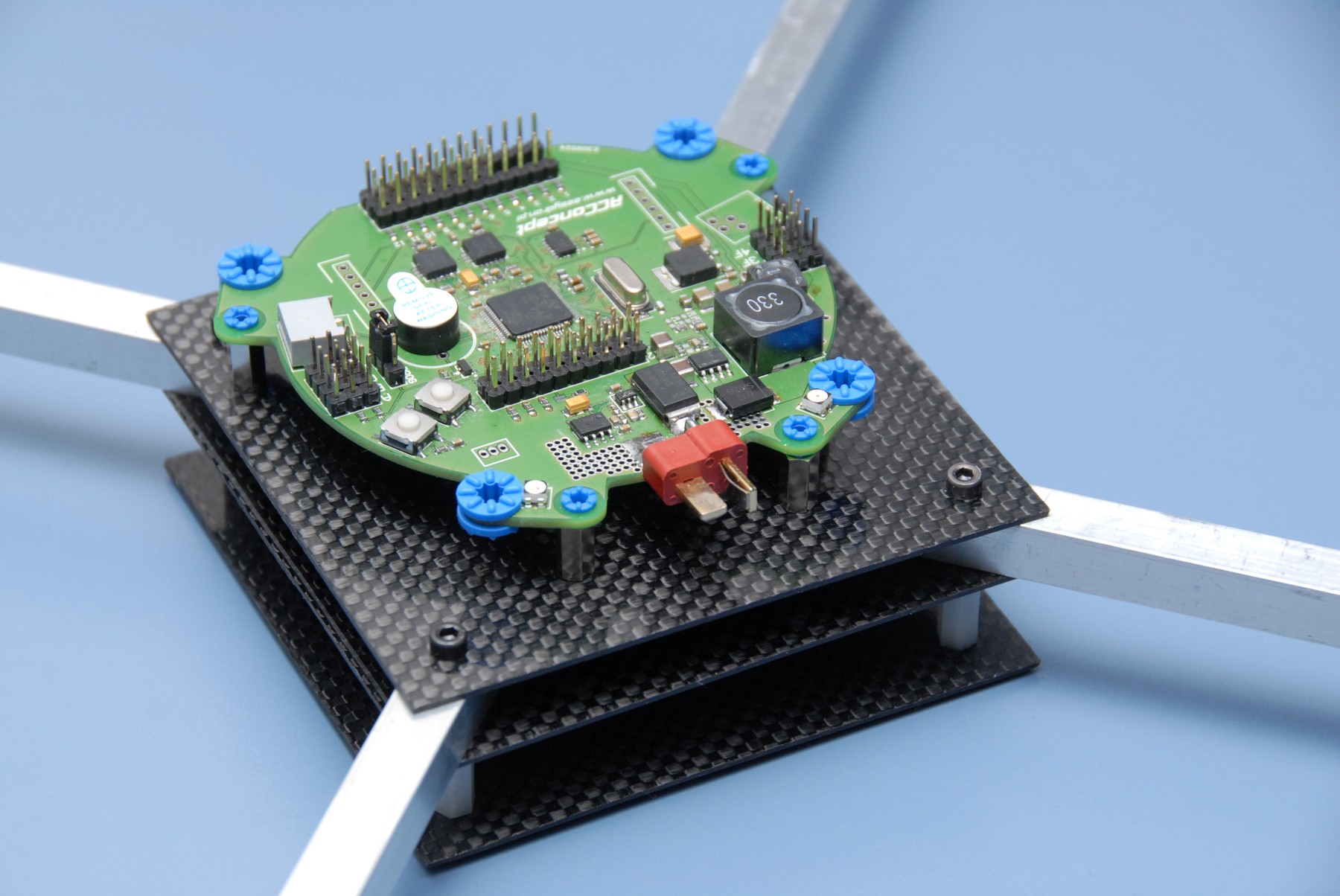
POWIĘKSZENIE
A także z tyłu:
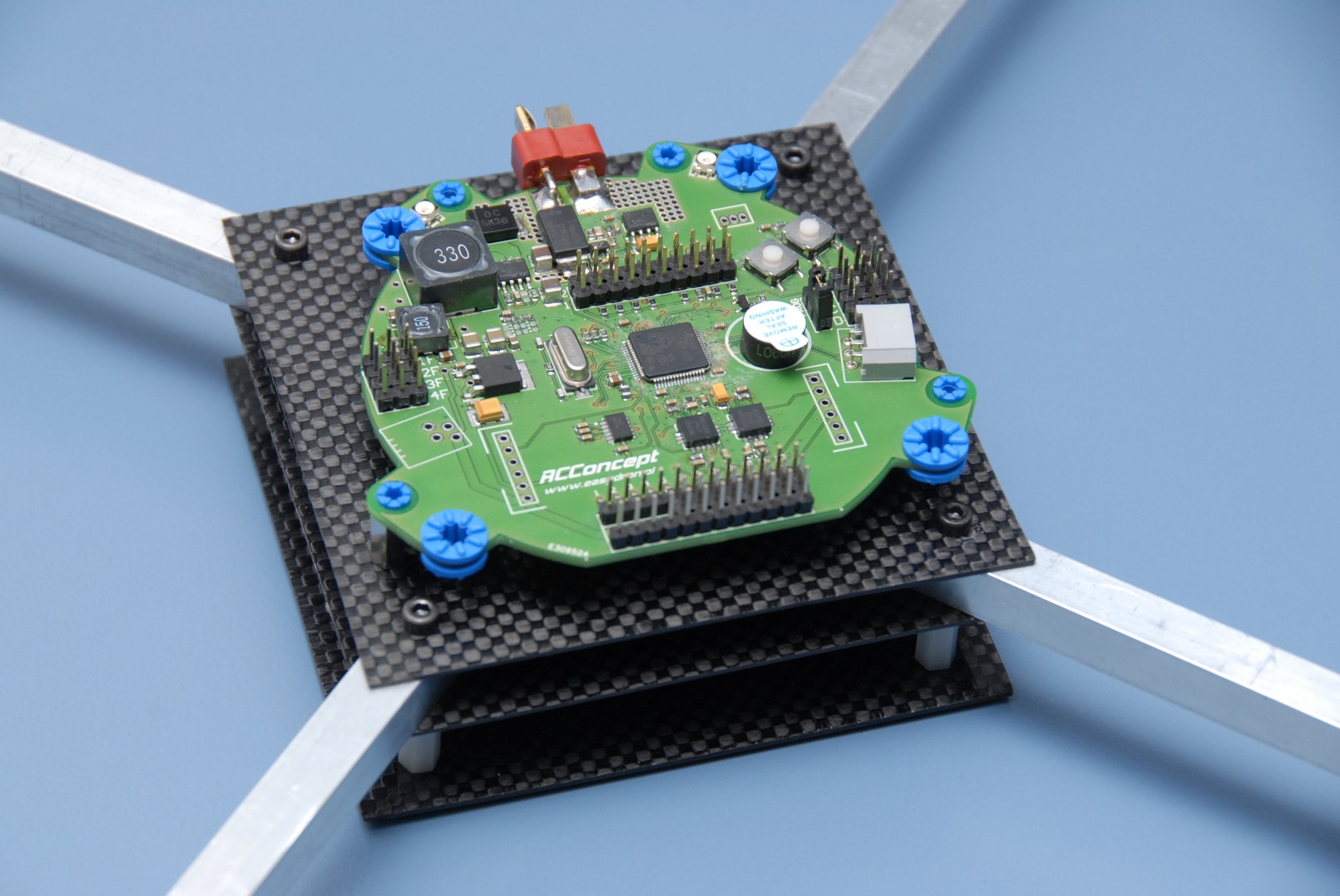
POWIĘKSZENIE
Wyposażeniem prototypu będą:
- 4 silniki ROBBE BL ROXXY 2827-34
- 2 śmigła prawoobrotowe APC 10x4,7 SF
- 2 śmigła lewoobrotowe APC 10x4,7 SFP
- 1 odbiornik FUTABA FASST R6107SP
- 4 regulatory easyESCU przygotowane do zasilania z 4S
- 1 moduł sterujący easyCSDU
- 2 pakiety 4S 2600mA (przerobione z pakietów 6S otrzymanych od Mateusza [midboss])
Regulatory easyESCU będą komunikować się z modułem easyCSDU w standardzie fastPWM o częstotliwości 300Hz.








