Nagranie startu i DVR reszty "lotu" (recorder niestety obciął dół):


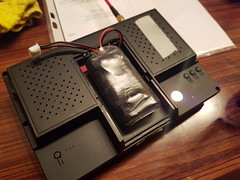
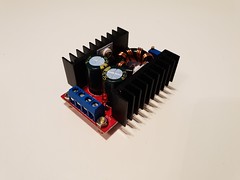
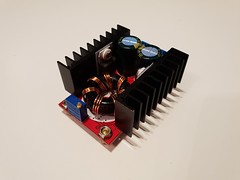
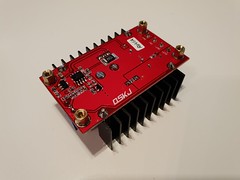
Zamówiłem kabel HDMI w formie taśmy z wymiennymi końcówkami. Został mi z nexa konverter AV na mini-hdmi, zrobię mini nadajnik AV z wymienną końcówką do kręcenia z ręcznego gimbala albo przyssawki na samochód, mój RX ma micro-hdmi a kolegi nex mini-hdmi więc będzie działało z dwoma aparatami. Konwerter + pakiet 2S + nadajnik video skręcony na 25mW - całośc w małym pudełeczku mocowane do samego aparatu. Z części kopterowych, przyszedł ESC na 6s - do testów nowego silnika, choć na razie nie planuję zmiany zasilania. Zamówiłem też samoprzylepną gumę pod pakiet - teraz łapię na rzepy na krzyż, z tym będę łapał na dwa równolegle.





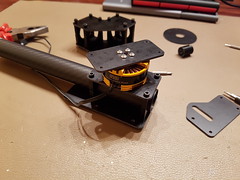
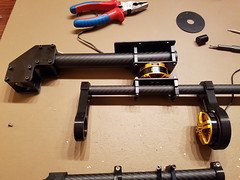
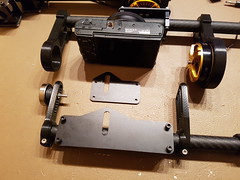
Zacząłem też kombinować z gimbalem - chcę zrobić ramę z podparciem z obu stron, mój aluminiowy gimal nie dość, że nie jest lekki to jeszcze wydaje mi się, że może to być sztywniejsze.
Ramiona roll są z tego projektu - https://www.thingiverse.com/thing:868706 a ramiona pitch z tego - https://www.thingiverse.com/thing:2755637
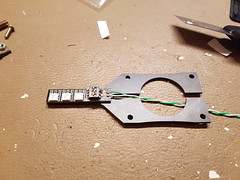
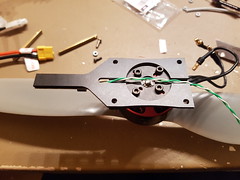
Nie są do końca kompatybilne, jedno ramie ma gniazdo na łożysko 28mm a drugie na śrubę 5mm. Wymyśliłem tulejkę przez którą chciałem puścić kable ale nie miałem ich ze sobą podczas projektowania i okazało się, że tulejka jest za krótka aby przełożyć wtyczkę multiterminal. Dla bezpieczeństwa też zrobiłem też zwykła prostą tulejkę i finalnie ona jest założona. Zrobiłem trochę nadwymiar i zeszlifowałem na wiertarce. Niestety ramiona roll miały otwór na rurkę 15mm zamiast 16mm, również musiałem szlifować od wewnątrz ale poszło bezproblemowo. Rurka na ramiona roll oraz pod aparat to 16mm - elementy ramy tarota, a pomiędzy silnikami roll i yaw będzie rurka 25mm - została mi z nóg. Wszystkie boomblocki aluminiowe, płytki łączące G10 2mm. Wydruk Z-ULTRAT (podobno wytrzymalszy niż PLA) na wypełnieniu 55%, tulejka 80%. Wagowo na pewno nie będzie więcej niż aluminiowy DYS a liczę, że sztywność będzie dużo większa, wyjdzie w praktyce.










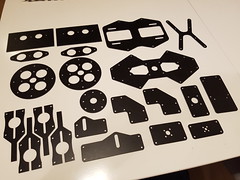
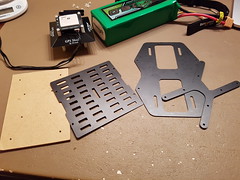
U forumowego kolegi JR65 zamówiłem zestaw niezbędnych płytek - wszystko co potrzebne do gimbala, pokład na GPS, pokład na pakiet, dolny pokład na podwozie (sztywniejszy a dużo lżejszy), elementy nowego wibroizolatora (na ściskanie) oraz uchwyty oświetlenia jako przekładki pod silniki prze które przejdą przewody - 3 godziny rysowania w CADzie ale jest wszystko czego brakowało. Kopter znowu w rozsypce, będę składał wszystko na nowych elementach w przyszłym tygodniu. Z problemów do rozwiązania - trzymanie wysokości, skaczące odczyty prądu i napięcia, siejąca telemetria. Jakieś pomysły? Będe musiał pogooglować za tym...