Postanowiłem więc poprowadzić relację z budowy, by zmotywować się do regularnych działań. Szczególnie, że mój SW, po blisko 4 sezonach i setkach przelecianych kilometrów naprawdę potrzebuje przejść na emeryturę.
Moja relacja będzie miała charakter niejako porównawczy tych dwóch platform.
O częściach użytych będę pisał na bieżąco, w trakcie opisywanego elementu.
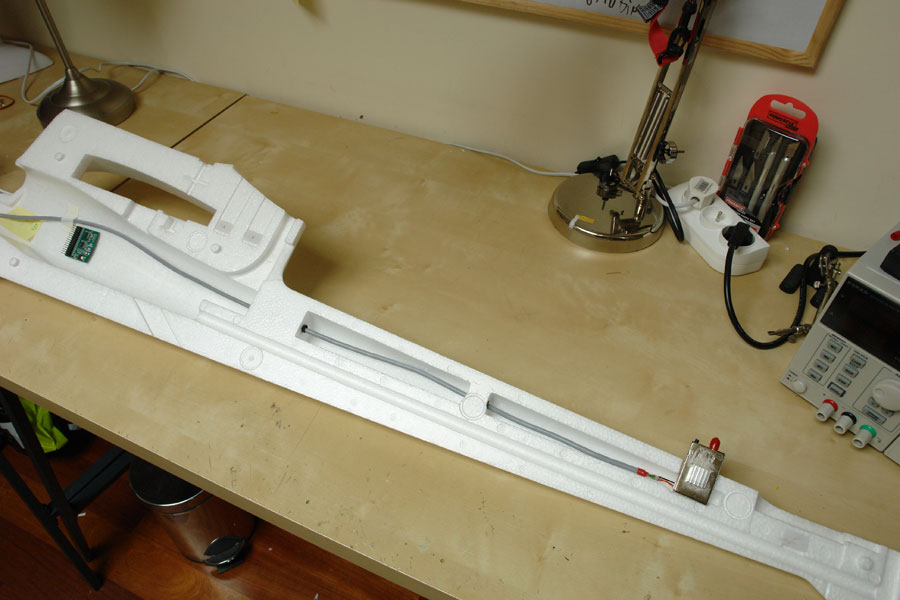
Pudło transportowe naprawdę jest ogromne, od razu rzuciło mi się w oczy, że spokojnie zmieściłbym w nim dwa Skywalkery lub prawie cały mój 182cm okręt podwodny

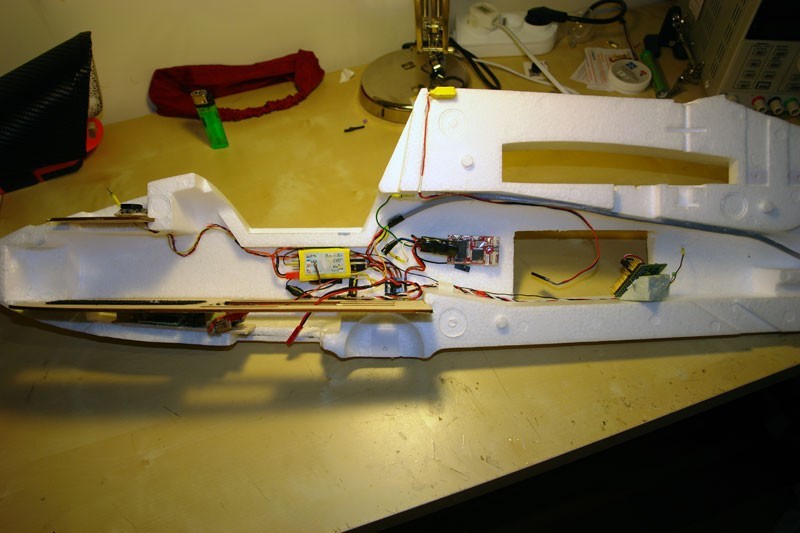
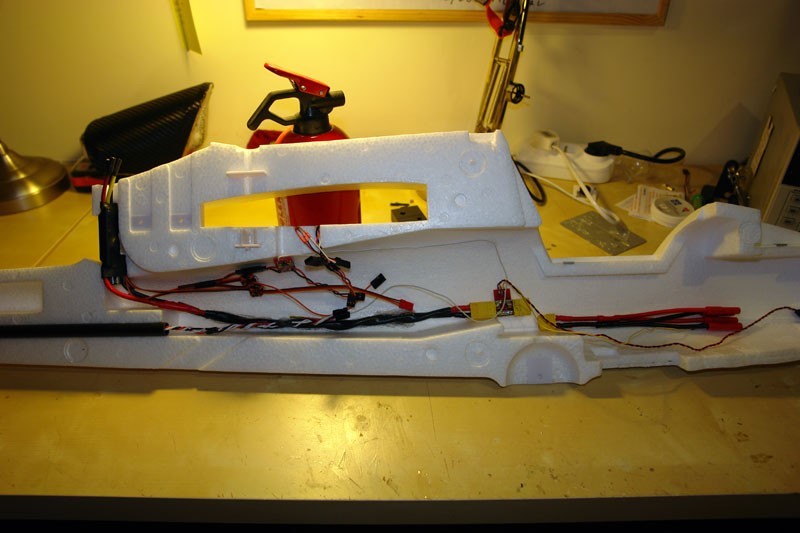
Model jest duży. Przestrzeń ładunkowa jest o koło 1/3 większa od SW. Dostęp jednak jest utrudniony, nie wiem też jeszcze jak będzie z środkiem ciężkości - umiejscowieniem akumulatorów. To czego jestem pewien, to że będę ciął bok, by mieć dostęp z boku jak w moim SW. Jestem jednak trochę rozczarowany "KITowoscią" zestawu. Skrzydła są częściowo sklejone, drewniane elementy częściowo poklejone. Ja wolę składać wszystko od podstaw, mam wtedy o wiele większe pole manerwu przy rozkładzie sprzętu, tu tak nie jest.

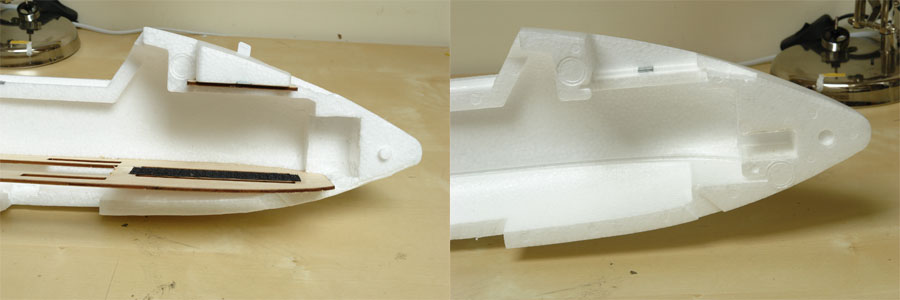
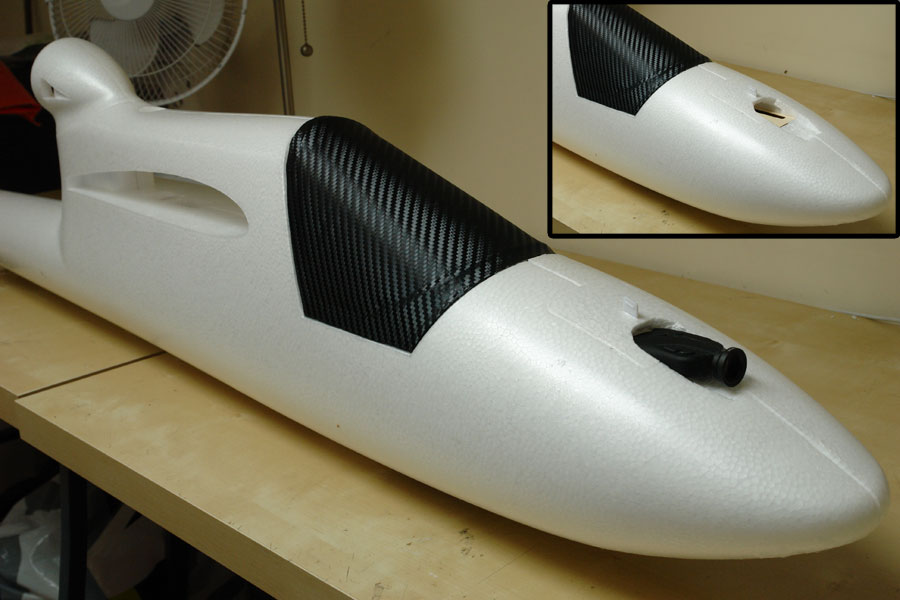
No dobra, w pierwszej kolejności nakaz eksmisji dostaje pilot - wkońcu ma to być samolot bezzałogowy
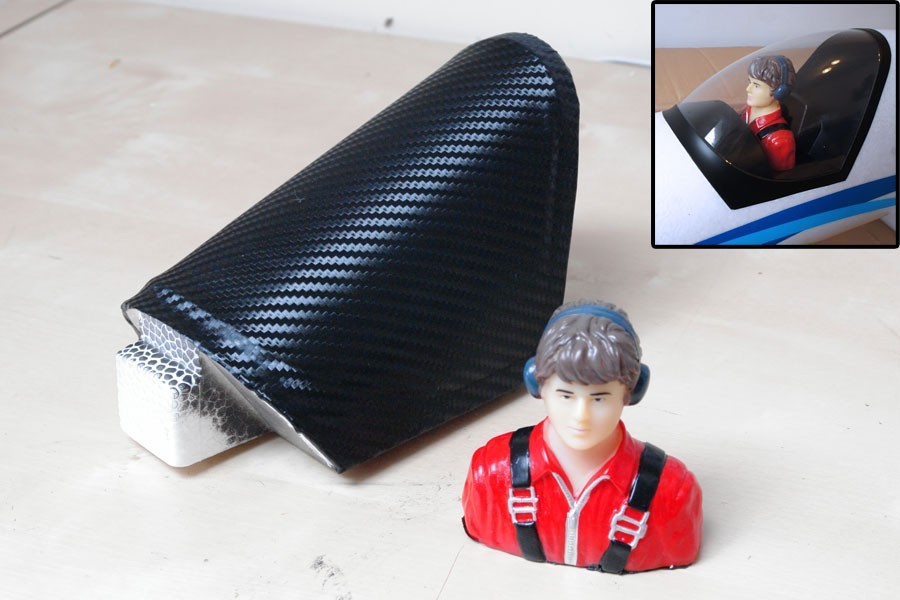
Tak wygląda nowa kabinka zamontowana w kadłubie. Po wielu namysłach nie będę montował GoPro3, postawiłem na kamerkę brylok #16 HD z wyjściem AV. Będzie to jedna z dwóch kamer, ta przy okazji będzie mi nagrywać loty.
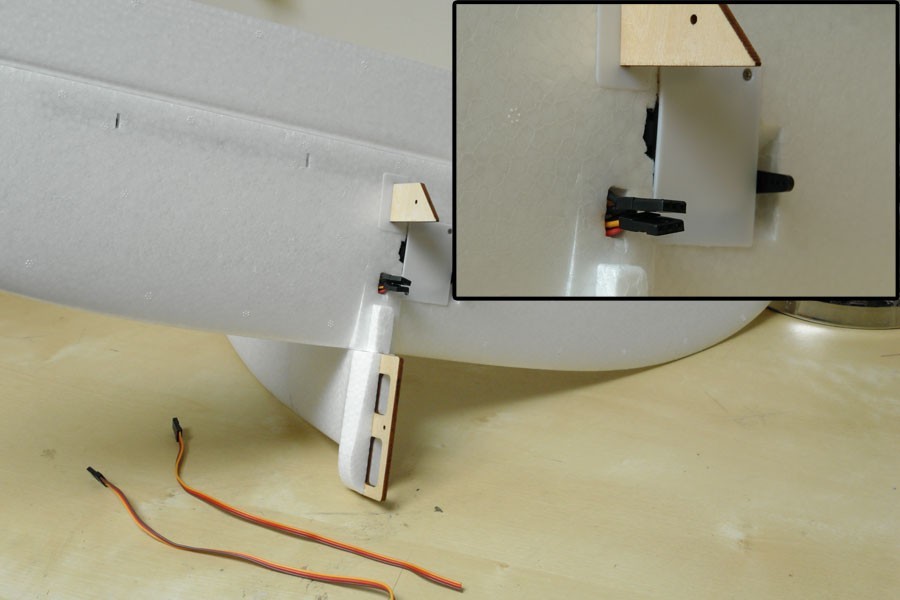
Złożyłem sobie też ogon.
Wykorzystane serwa to HXT900 na sterze kierunku i HXT MG14 na sterze wysokości. To drugie oczywiście znacznie mocniejsze i z metalowymi trybami. Jest też trochę większe, więc musiałem nadciąć plastikowe łoże serwa. Kable serw musiały zostać maksymalnie skrócone, by wtyczki miały swoje zakończenia na łączeniu ogona z kadłubem. Ogonki, które zostały na pewno się przydadzą
Nie obyło się bez niespodzianek

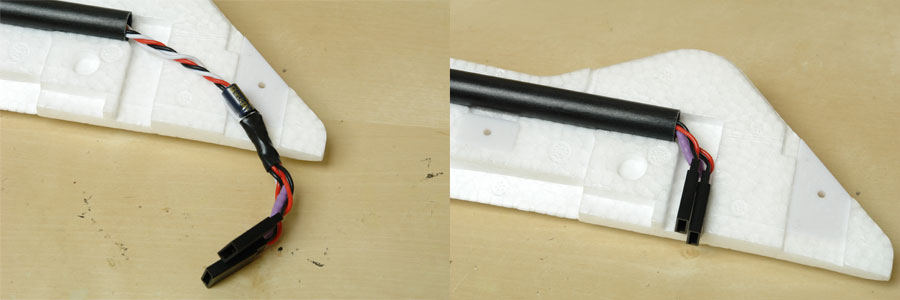
 . Obydwa zostały pozbawione swoich oryginalnych tasiemek i dostały skrętkę.
. Obydwa zostały pozbawione swoich oryginalnych tasiemek i dostały skrętkę.