
Tak jak radziliście poprawiłem:
- mocowanie statecznika poziomego,
- zmieniłem serwa ogonowe na te z metalowymi trybami (Turnigy MG90S)
Dodatkowo zdążyłem przetestować tylko elektronikę i straciłem trochę czasu na odpalenie OSD (wymieniłem procesor). Dodatkowo miałem trochę problemów, bo OSD nie mieści się na ekranie monitorka, ale po podłączeniu Fatsharków okazało się, że jest OK, więc to problem monitorka.
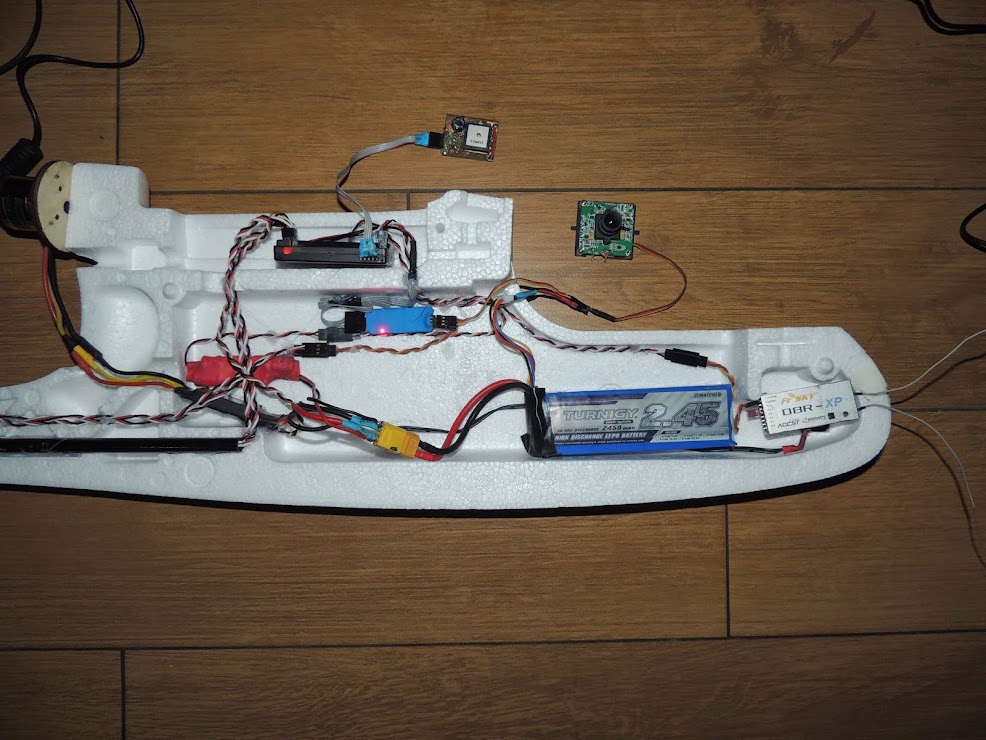
Rzucie okiem jeszcze na obecną konfigurację, bo w kolejnym kroku będę sklejał połówki i wolał bym wyeliminować bablole już na tym etapie. :)

Tego nie wiedziałem, będzie trzeba przetestować. Ja używam suszarki do włosów lub lutownicy hot air z płynna regulacją temperatury.Sonic pisze: Glusia (klej na gorąco) wystarczy pomoczyć trochę izopropanloem (Kontakt IPA, Cleanser IPA itp) i odchodzi bez niczego od każdej powierzchni.....
Będzie albo wycięty otwór z boku na kabel, albo polutuję kątową przejściówkę.Capo pisze: A jak z dostępem do USB w autopilocie? W APMie jest z boku i dostęp jest bardzo utrudniony.
Dodatkowo też będzie opcjonalnie montowany moduł transmisji radiowej do APMa (kabelki będą wyprowadzone na skrzydło.
LRS będzie tylko zastanawiam się jescze jaki. Albo OpenLRS i APM jako autopilot, albo Open LRS i Zbigowa kanapka albo KFC32FB i wtedy eleres.mknet pisze: Proponuję zastanowić się nad zakupem LRS'a, frsky na początek jest ok, lecz z czasem brakuje kanałów i zasięgu.
W tamtym sezonie latałem na frsky + dopał 2W, latało się ok, jednak nie miałem przekonania co do tego sprzętu.
Wszystko było zależne od miejscówki i aparatów siejących na 2.4ghz, a tego jest około mnóstwa wszędzie.
Np. lecąc na północ miałem 1500m i pierwsze fs'y, na południe spokojnie 4km z 100% mieciowym a'la rssi.
Ten rok wystartował z eleresem, link pewny, bezpieczny, mnóstwo rożnych ficzerów, niebo a ziemia w porównaniu z frsky.
Pierwsza, chybiona konfiguracja sprzętowa i lot na 8km na 100mW nie był problemem
Ostatnio wyciągnąłem dipola na skrzydło, docelowo 15km, jednak potrzebne są nowe pakiety.
Dużo czasu nad tym nie spędziłem, ale softwarowej opcji nie znalazłem, więc prawdopodobnie wylutuję go i zrobię nową płytkę pod GPS z magnetometrem załączanym zworką.mknet pisze: Co do APM'a to na pewno wywal magnetometr, software'owo lub hardware'owo.
W skrzydlatych nie jest on potrzebny, wystarczy kurs z gps'u.
Z ap zawsze można się komunikować przez dynks rs232/ttl





