Cześć, mam dziwny problem. W czasie lotu model pika, pikanie przypomina proces kalibracji magnetometru i trwa około 5s. W czasie 10min lotu pikanie występuje co najmniej jeden raz.
Występuje na regulatorach BL-Ctrl V2.0 i V1.2, nie występuje na klonach.
Występuje niezależnie od tego czy jest nawi czy nie ma
Występuje w FC v2.1 i 2.0
Pikanie nie ma żadnego wpływu na lot.
Po założeniu karty pamięci do nawi i jej odczytaniu programem MK_gpxtool pojawiają się różne błędy, w tym błąd I2C, signal lost, battery low.
Zauważyłem że najczęściej "pika" przy dużych prędkościach.
Niedawno wymieniłem koledze regulatory na v1.2 i problem również się pojawił.
jakieś pomysły?
Pikanie MK podczas lotu
Moderatorzy: moderatorzy2014, moderatorzy
Pikanie MK podczas lotu
EPP FPV, Trex600 gimball, MK Hexa, MK quad, KFC 250quad, Naza2 Hexa, Fantom Czy Pro
DX8, Eleres
DX8, Eleres

Jeśli latasz z nową nawi (z kompasem) zobacz w logach jaką ma wartość parametr "Magnet Field" powinien zawierać się w zakresie od 80 do 120 jeśli jest poza zakresem będzie piszczało (choć inaczej niż opisujesz). Do głowy przychodzi mi tylko zaznaczona opcja vario przy locie z trzymaniem wysokości. Wtedy pika naprawdę tak jak przy kalibrowaniu kompasu. :) Ale skoro masz błędy w I2C to popatrz na kabelkologię, może jakieś kable są źle polutowane i w trakcie lotu wibracje modelu powodują chwilowe błędy.
Logi to podstawa, zapisuj je i analizuj po locie. Zobacz czy problemy są przy wznoszeniu ( duże prądy) czy przy opadaniu. Może w zakrętach tylko. Jest wiele opcji. No i zapodaj jakiegoś loga do popatrzenia.
Logi to podstawa, zapisuj je i analizuj po locie. Zobacz czy problemy są przy wznoszeniu ( duże prądy) czy przy opadaniu. Może w zakrętach tylko. Jest wiele opcji. No i zapodaj jakiegoś loga do popatrzenia.
Pozdrawiam
Marcin
Marcin
Pikanie prezentowane jest tutaj:
http://youtu.be/I0GqI87dnBc
widać, że na samym końcu pikania występuje kopnięcie
magnet field jest między 87 a 113
Vario nie używałem.
http://youtu.be/I0GqI87dnBc
widać, że na samym końcu pikania występuje kopnięcie
magnet field jest między 87 a 113
Vario nie używałem.
EPP FPV, Trex600 gimball, MK Hexa, MK quad, KFC 250quad, Naza2 Hexa, Fantom Czy Pro
DX8, Eleres
DX8, Eleres
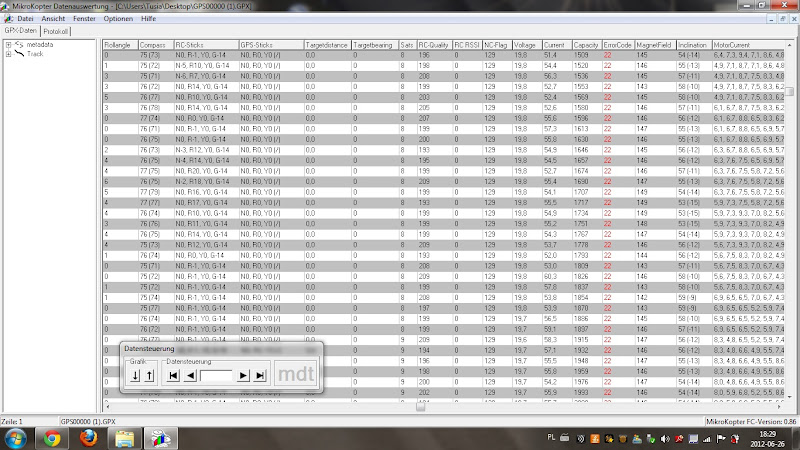
Tutaj znajdują się logi:
http://mediasky.pl/gpx/
Plik na którym widać problem to fragment filmu po pierwszej minucie: GPS00000.GPX
http://mediasky.pl/gpx/
Plik na którym widać problem to fragment filmu po pierwszej minucie: GPS00000.GPX
EPP FPV, Trex600 gimball, MK Hexa, MK quad, KFC 250quad, Naza2 Hexa, Fantom Czy Pro
DX8, Eleres
DX8, Eleres
Przez cały lot masz błąd 22 (błąd kompasu) wynikający ze zbyt dużego "magnet field". Poprowadź inaczej kable ob pakietu/ unieś płytkę navi do góry/ przesuń ją w inne miejsce. Będzie ok.
Edit: Wiesz że zadziałanie RTH czy trzymania pozycji przy Error 22 jest bardzo nie stabilne. wiec ostrożnie z lataniem aż nie uporasz się z tym kompasem.
Edit: Wiesz że zadziałanie RTH czy trzymania pozycji przy Error 22 jest bardzo nie stabilne. wiec ostrożnie z lataniem aż nie uporasz się z tym kompasem.
Pozdrawiam
Marcin
Marcin
Sorry mój błąd, pomieszałem Twoje logi z logami kuby. :)
Teraz tak FC wywala Ci błąd I2C w:
69s do 78 przy opadaniu tryb free
155s do 163 przy opadaniu tryb PH
297s do 306 przy opadaniu Free
oraz 427 do 436 przy opadaniu free
Stawiał bym na walnięte złącze między FC a dystrybucyjną. Polutuj je może na stałe.
Do czytania logów używam MK_GPX_MDI_0102_Beta
Co do regli nie z MK to FC nie piszczy bo one pewnie nic nie wysyłają do FC, te chińskie regle słabo oddają info z siebie.
Teraz tak FC wywala Ci błąd I2C w:
69s do 78 przy opadaniu tryb free
155s do 163 przy opadaniu tryb PH
297s do 306 przy opadaniu Free
oraz 427 do 436 przy opadaniu free
Stawiał bym na walnięte złącze między FC a dystrybucyjną. Polutuj je może na stałe.
Do czytania logów używam MK_GPX_MDI_0102_Beta
Co do regli nie z MK to FC nie piszczy bo one pewnie nic nie wysyłają do FC, te chińskie regle słabo oddają info z siebie.
Pozdrawiam
Marcin
Marcin
Dzięki kolego. Mam nadzieję że Twoje rady będą słuszne.
Znalazłem problem, do regulatora 5 poprzez Distribution Board pomykały ścieżki C i D. C miała permanentną przerwę. Znalazłem to przypadkiem poprzez przypadkowe naciśnięcie na regulatory. Właśnie silnik 5 kopnął.
MKtool utwierdził mnie w problemie.

Teraz tylko testy.
Pozdrawiam
Znalazłem problem, do regulatora 5 poprzez Distribution Board pomykały ścieżki C i D. C miała permanentną przerwę. Znalazłem to przypadkiem poprzez przypadkowe naciśnięcie na regulatory. Właśnie silnik 5 kopnął.
MKtool utwierdził mnie w problemie.
Teraz tylko testy.
Pozdrawiam
EPP FPV, Trex600 gimball, MK Hexa, MK quad, KFC 250quad, Naza2 Hexa, Fantom Czy Pro
DX8, Eleres
DX8, Eleres