
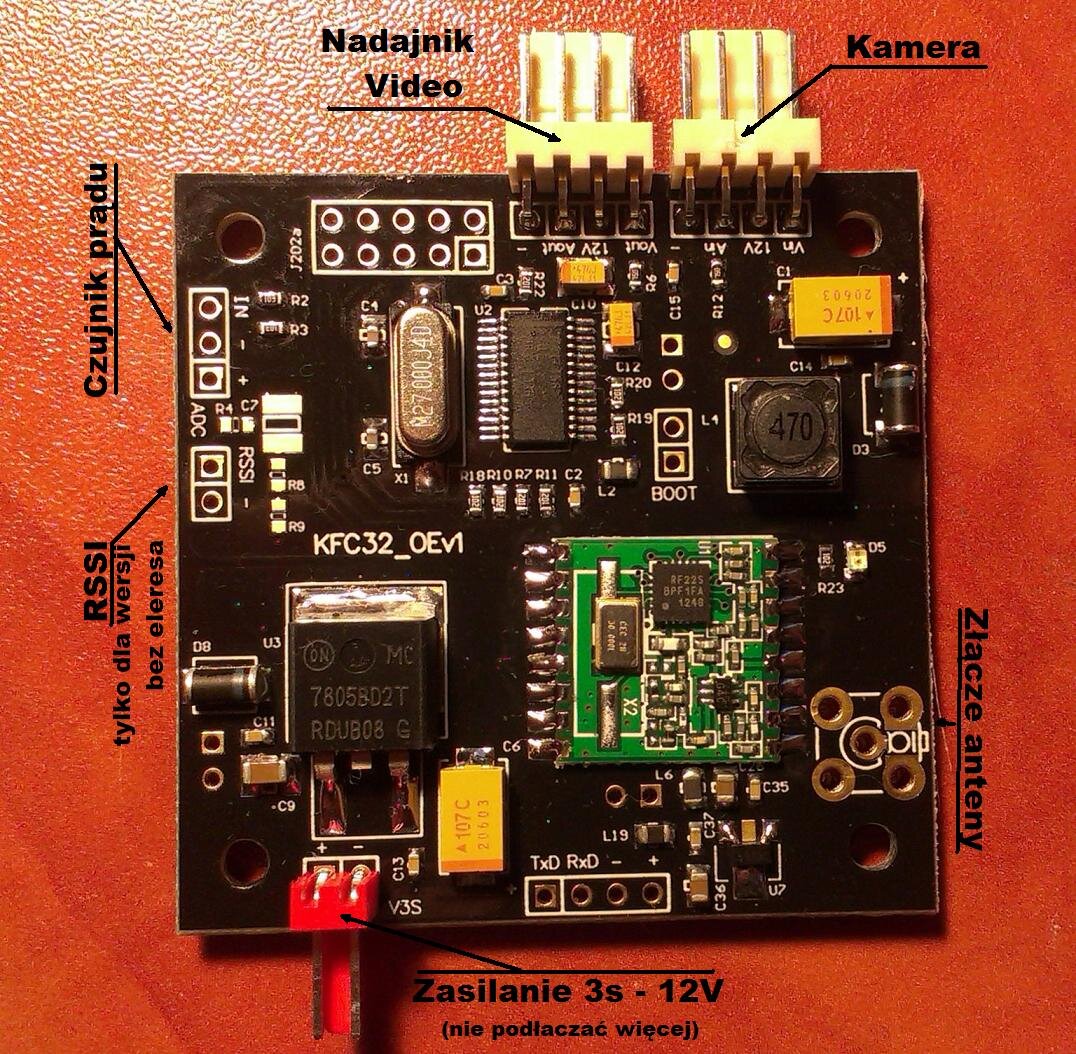
- moduł OSD
- filtrowanie zasilania kamery i nadajnika video - złącza wideo kompatybilne z MiśOSD
- odbiornik eleresa
- BEC dla IMU
- wejście ADC na czujnik prądu (trzypinowe z zasilaniem 5V)
- wejście RSSI w przypadku braku RFM22
Bardzo fajny i obszerny opis jest również na stronie kolegi Pirzola
Prosiłbym abyście tutaj wyrazili swoje pomysły i co wam się podoba/niepodoba w aktualnej koncepcji póki nie poszła partia produkcyjna.
Na razie wygląda to tak ale będzie jeszcze kilka drobnych poprawek:
U układzie gdy mamy OSD obok IMu można dać tasiemkę:
Skrócony opis podłączenia i konfiguracji:
1. Aby obsługiwać powyższe OSD należy posiadac w KFC32 wgraną wersję v46 lub wyższą
2. Obsługę OSD właczamy za pomocą konsoli poleceniem "feature OSD"
3. Jeżeli wybraliśmy wersję z modułem eLeReSa to aktywujemy go poleceniem "feature eleres" (szerszy opis eleresa w oficjalnym manualu)
4. Jeżeli chcemy wbudowany BEC używać do zasilania IMU to na OSD od spodu przy złączy SPI jest zworka do zalutowania. Pamiętajmy aby w takim układzie odłączyć zasilanie z regulatora kanału PWM1 a w przypadku KFC32 - wersja czarna z PWM2
5. Wejście do menu wykonujemy za pomocą kombinacji znanej z MiśOSD czyli: Throttle na połowę i jednocześnie PITCH na minimum na przez 1sekundę
6. Poruszanie po menu:
PITCH - góra / dól
ROLL - zatwierdzanie opcji lub wybor Tak/Nie, zmiana wartości
YAW - wychodzi do poprzedniego ekranu (poza wyjściem z głównego menu)
7. Przełączanie aktywnych ekranów - w GUI pojawi się nowa opcja z nazwą OSD. Przypisujemy do niego przełącznik i sekwencja włączenie / wyłączenie spowoduje przełączenie ekranu na kolejny
8. Kalibracja Czujnika prądu -
- bierzemy naładowany pakiet i idziemy latać
- po zakończeniu latania zapamiętujemy wartość zużycia prądu wyświetlanego w OSD
- ładujemy pakiet za pomocą ładowarki pokazującej mAh i również zapamiętujemy
- Wchodzimy do menu OSD->czujnik prądu->Kalibracja... i wprowadzamy zapamiętane dane za pomocą drążków i zatwierdzamy. Przy następnym locie wskazania mAh oraz A powinny być już OK.
9. Resetowanie ustawień OSD - jeżeli chcemy skasować tylko ustawienia OSD to w konsoli możemy zrobić to komendą "osd_reset"




